Open Access is an initiative that aims to make scientific research freely available to all. To date our community has made over 100 million downloads. It’s based on principles of collaboration, unobstructed discovery, and, most importantly, scientific progression. As PhD students, we found it difficult to access the research we needed, so we decided to create a new Open Access publisher that levels the playing field for scientists across the world. How? By making research easy to access, and puts the academic needs of the researchers before the business interests of publishers.
We are a community of more than 103,000 authors and editors from 3,291 institutions spanning 160 countries, including Nobel Prize winners and some of the world’s most-cited researchers. Publishing on IntechOpen allows authors to earn citations and find new collaborators, meaning more people see your work not only from your own field of study, but from other related fields too.
To purchase hard copies of this book, please contact the representative in India:
CBS Publishers & Distributors Pvt. Ltd.
www.cbspd.com
|
customercare@cbspd.com
Morse theory plays a central role when we study the configuration space of various mechanical linkages. As an important linkage, we consider the planar robot arm. It is known that the distance function on its configuration space is a Morse function. On the other hand, for a fixed angle θ, we consider the spatial robot arm whose adjacent bond angles are θ. In chemistry, such an arm is used as a model for protein backbones and has been studied extensively. We consider the distance function on its configuration space. The purpose of this chapter is threefold: First, we study whether the distance function is a Morse function. Second, we determine the minimum and maximum values of the function. Consider the case that the arm consists of four bars. Then our third purpose is to study how the distance function is different from the usual Morse function on the torus.
Faculty of Science, Department of Mathematical Sciences, University of the Ryukyus, Nishihara-Cho, Okinawa, Japan
*Address all correspondence to: kamiyama@sci.u-ryukyu.ac.jp
1. Introduction
1.1 Mathematical study of robotics
A motion planning problem studies a sequence of valid configurations of a given mechanical linkage. The problem is interesting because it has many important robotics applications. Some impressive results are obtained in Refs. [1, 2, 3]. Mathematicians are also interested in the configuration space of mechanical linkages. Here, the configuration space is defined as the space of all possible shapes of the linkage. Robot arms are quite important examples of mechanical linkages: in molecular biology, the arms describe molecular shapes and the arms play a central role in statistical shape theory.
Morse theory plays a central role when we study the configuration space of robot arms. (See Ref. [4] for the excellent survey with emphasis on the Morse theory.) In differential topology, Morse theory is a powerful tool to analyze spaces. A function f:M→R on a manifold M is called a Morse function if every critical point of f is nondegenerate. Morse functions play a principal role in the Morse theory.
The Morse property for the distance function on the configuration space of the robot arm in R2 is studied well. The purpose of this chapter is to consider the distance function on the configuration space of another robot arm.
1.2 The most famous mechanical linkage: The robot arm in R2
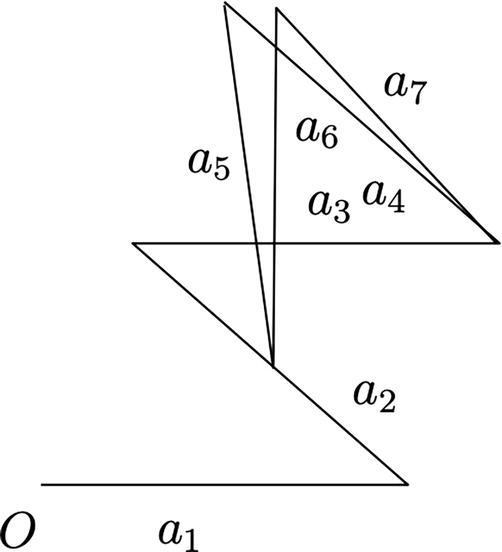
We consider the robot arm in R2, which consists of n bars of length 11…1 connected by revolving joints. The initial point of the robot arm is fixed at O. The configuration space of the robot arm is
Wn=u1…un∈S1n/SO2.E1
By the SO2-action, we may normalize u1 uniquely to be 10. Hence, there is an identification
Hereafter, we will use (2) as the definition of Wn. (See the following Figure 1.)
Figure 1.
An element of W4.
1.3 The distance function on Wn: Remarkable results
We define the function
μn:Wn→RE4
by
μnu1…un=∑i=1nui2.E5
Note that μn−10 is the equilateral polygon space, which is a critical manifold of dimension n−3. In order to avoid critical manifolds of positive dimension, we consider the following restriction of μn:
μnWn\μn−10:Wn\μn−10→R.E6
It is proved in Refs. [5, 6] (see also [[4], Lemma 1.4]) that (6) is a Morse function. More precisely, a critical point corresponds to the case that ui=±u1 for 2≤i≤n. Moreover, the index of a critical point is determined explicitly. This Morse property has many interesting applications. Among them, the following two applications are particularly important:
It is proved in Ref. [7] that polygon spaces are obtained from the sphere by successive surgeries.
The homology groups of planar polygon spaces are determined in Ref. [8].
1.4 A new robot arm: A mathematical model for protein backbones
We fix θ∈0π. The robot arm in R3 with all bond angles θ, permitting “dihedral” spinning about each edge, has been used to model the geometry of protein backbones [9, 10]. Let Xnθ be the configuration space of the arm. That is, Xnθ is defined as the space of all possible shapes of our arm. (See Section 2 for more details.)
1.5 The main problem
Let fn,θ:Xnθ→R be the distance function. In this chapter, we study three problems concerning fn,θ. (See Problem 2.7.) The most important problem is given as follows: Does fn,θ satisfy the Morse property?
1.6 Motivation for the main problem
We explain the motivation for the above main problem. Recall that we have Wn=S1n−1. Similarly, we can prove that Xnθ=S1n−2. Moreover, μn and fn,θ are defined to be the distance functions. Now since μn satisfies the Morse property, it is natural to ask whether fn,θ also satisfies the property.
1.7 Previous study on fn,θ
Although some chemists are interested in a special element of Xnθ, nobody has studied the space Xnθ nor the function fn,θ. Hence, our results are completely new.
1.8 Summary of the main result
The function fn,θ satisfies the Morse property if and only if n=3 or 5.
1.9 Organization of this chapter
In Section 2, we first prepare notations. Then we pose three problems in Problem 2.7. Finally, we summarize the known results in Theorems 2.9, 2.10 and 2.11. In Section 3, we state our main theorems. Theorems A and B are answers to the first problem of Problem 2.7. Theorems C and D are answers to the second problem. Theorem E is an answer to the third problem. In Section 4, we construct submanifolds of Xnθ, which are used in Section 5. In Section 5, we prove our main theorems. In Section 6, we state the conclusions.
From (13) and (14) for i=1, we obtain a3 and n3. Next from (13) and (14) for i=2, we obtain a4 and n4. Repeating this process, we obtain ai and ni for 1≤i≤n. Now we define T by
Teiϕ1⋯eiϕn−2=a1⋯an.E16
From the construction, T is a diffeomorphism.
Notation 2.2. We define the element ϕ1…ϕn−2∈Xnθ by
ϕ1…ϕn−2≔Teiϕ1⋯eiϕn−2,E17
where the diffeomorphism T is constructed in Lemma 2.1.
Lemma 2.3.Assume thatϕi∈0πfor1≤i≤n−2. We writeϕ1…ϕn−2=a1…an. Then the following results hold:
For1≤i≤n−2, aiis a vector inR2.
Ifϕj=π, then we haveaj+2=aj. (See the left of the followingFigure 3.) On the other hand, ifϕj=0, thenaj+2is as given in the right of the followingFigure 3.
Figure 3.
Left: ϕj=π. Right: ϕj=0.
Proof of Lemma 2.3: The lemma is clear from the construction of the diffeomorphism T in Lemma 2.1.
Using Lemma 2.3, we give the following:
Definition 2.4.
Consider the point ϕ1…ϕn−2 such that ϕi=π for 1≤i≤n−2. We denote the unique point by Pn,θ. (See the following Figure 4.)
Consider the point ϕ1…ϕn−2 such that ϕi=0 for 1≤i≤n−2. We denote the unique point by Qn,θ. (See the following Figure 5.)
Figure 4.
P4,θ.
Figure 5.
Q4,θ.
Definition 2.5.
We define the function
fn,θ:Xnθ→RE18
by
fn,θa1…an=∑i=1nai2.E19
We also define the function
dn,θ:Xnθ→RE20
by
dn,θ≔fn,θ.E21
We also set
ℓn,θ≔mindn,θXnθandLn,θ≔maxdn,θXnθ.E22
Remark 2.6. The point Pn,θ in Definition 2.4 (i) is particularly important. In fact, as we see in Proposition 4.1, Pn,θ is a degenerate critical point of fn,θ when n is even.
The purpose of this chapter is to study the three items in the following:
Problem 2.7. (i) We study whether fn,θ satisfies the same Morse property as μn.
(ii) We obtain explicit formulae for Ln,θ and ℓn,θ.
(iii) We study how the level set d4,θ−1r changes as r moves in R.
Background 2.8. We explain the background for the items in Problem 2.7.
(i) The motivation for Problem 2.7 (i) is explained in Subsection 1.6. More precisely, recall that μn in (4) is a function on S1n−1. On the other hand, by Lemma 2.1, we can regard fn,θ as a function on S1n−2. Then it is natural to ask whether fn,θ has the same Morse property as μn.
(ii) About Problem 2.7 (ii), it is known that a point of Xnθ attains Ln,θ or ℓn,θ. (See Theorem 2.10.) Hence, our task is to obtain explicit formulae for Ln,θ and ℓn,θ.
(iii) About Problem 2.7 (iii), as we stated in Remark 2.6, P4,θ is a degenerate critical point of f4,θ. Hence, we cannot apply the Morse theory for f4,θ. Instead, we determine the level set d4,θ−1r for each r∈R. In particular, we see from our result that f4,θ is in fact different from the usual Morse function on S12.
We summarize the known results in the following Theorems 2.9, 2.10 and 2.11. First, it is clear that μn−10 is always nonempty. On the other hand, we have the following:
fn,θ−10=∅,if0<θ<πnorn−2nπ<θ<π,onepoint,ifθ=πnorn−2nπ,aspace of dimensionmaxn−50,ifπn<θ<n−2nπ.E23
Whennis even, we have
fn,θ−10=∅,if0<θ<n−2n,onepoint,ifθ=n−2nπ,aspace of dimensionmaxn−50,ifn−2nπ<θ<π.E24
Proof: Note that fn,θ−10 is the configuration space of equilateral spatial n-gons whose first n−1 bond angles are θ. In Ref. [13], the space is denoted by Pnn−1θ and the corresponding results are proved using the notation Pnn−1θ. If we rewrite Pnn−1θ to fn,θ−10, then we obtain the theorem.
We state our second known result. Recall that Pn,θ and Qn,θ are defined in Definition 2.4.
The followingFigure 6illustrates the caseθ=π2. Note that whenθ=π2we haveM4θ=Q4,θ, whereQ4,θis illustrated inFigure 5.
Figure 6.
The element of M4π2.
On the other hand, the followingFigure 7illustrates the case0<θ<π2. The two figures inFigure 7are mirror images of each other with respect to thexy-plane.
First, we give an answer to Problem 2.7 (i). (See Example 3.2, Theorems A and B.) Theorem 2.9 tells us that if n≥6, then fn,θ−10 is a critical manifold of positive dimension. In order to avoid such a manifold, we remove fn,θ−10 from the domain of fn,θ in the same way as given in (1.3):
Notation 3.1. We abbreviate the following restriction by gn,θ:
fn,θXnθ\fn,θ−10:Xnθ\fn,θ−10→R.E27
We begin by studying the most elementary case in the following:
Example 3.2. Consider the case n=3. By Theorem 2.9 (i), f3,θ−10 consists of at most finite points. Hence, we may consider f3,θ for g3,θ. We fix θ and use the diffeomorphism T:S1→X3θ in Lemma 2.1. Then we can write f3,θ∘T as
f3,θ∘Teiϕ1=c1+c2cosϕ1E28
for some c1>0 and c2<0. Hence for all θ, f3,θ is a Morse function with two critical points.
Proof of Example 3.2: First, using (13), we compute a3. Second, using (19), we compute f3,θ∘Teiϕ1. Then we obtain (28). Note that (28) implies that f3,θ∘T is essentially the same as the usual Morse function on S1.
Next, we consider the case n=5. Similarly to Example 3.2, we may consider f5,θ for g5,θ.
Theorem A.
We set
α≔2arccot7≈0.23πandβ≔2arctan3+2511≈0.43π.E29
Using this, we set
Θ≔0π\π5απ3β35π.E30
Thenf5,θis a Morse function if and only ifθ∈Θ.
Forθ∈Θ, letνibe the number of critical points off5,θwith indexi. Then the four-tupleν0ν1ν2ν3is given by the followingTable 1.
InTable 1, all critical points of index0attainminf5,θX5θ.
θ
0π5
π5α
απ3
π3β
β35π
35ππ
ν0ν1ν2ν3
1,3,3,1
4,7,4,1
4,9,6,1
4,11,8,1
4,9,6,1
1,5,5,1
Table 1.
The set ν0ν1ν2ν3.
Remark 3.3. (i) Consider the case π5<θ<35π. Then by Theorem 2.9, we have an identification f5,θ−10={kpoints} for some k∈ℕ. By Theorem A (iii), we have in fact that k=4.
(ii) In Table 2, we give a more precise information on f5,θ for the case θ is the ideal tetrahedral bond angle, i.e., θ=arccos−13≈109.5∘.
Critical value
Approximated value
Index
Number of critical points
17
17
3
1
1219
13.44
2
1
49+2069
10.88
2
4
899
9.88
1
3
10727
3.96
1
2
181
0.01
0
1
Table 2.
The critical points of f5,θ for θ=arccos−13.
The following theorem is the most crucial result about Problem 2.7 (i).
Theorem B.Letnbe an integer that satisfiesn=4orn≥6. Then for allθ, gn,θis not a Morse function.
Second, we give an answer to Problem 2.7 (ii). (See Theorems C and D.)
Theorem C.
Whennis odd, we have
Ln,θ=n2+12−n2−12cosθ.E31
Whennis even, we have
Ln,θ=nsinθ2.E32
Theorem D.
Whenn=2m+1, we have the following results:
Whenn−2nπ<θ<π, we have
ℓn,θ=−cosθ2−m+1θ+πcosθ2.E33
Whenπn≤θ≤n−2nπ, we have
ℓn,θ=0.E34
When0<θ<πn, we have
ℓn,θ=−1m+1cosθ2−m+1θ+πcosθ2.E35
Whenn=2m, we have the following results:
Whenn−2nπ<θ<π, we have
ℓn,θ=−sinmθ−πcosθ2.E36
When0<θ≤n−2nπ, we have
ℓn,θ=0.E37
Third, we give an answer to Problem 2.7 (iii). (See Theorem E.) We define the functions αθ, βθ and γθ as follows:
The graphs of αθ, βθ and γθ are given by the following Figure 8.
For0<θ<π, we haveL4,θ=αθ.
We have
Figure 8.
The graphs of αθ, βθ and γθ.
ℓ4,θ=γθ,ifπ2<π<θ,0,if0<θ≤π2.E41
Proof of Lemma 3.4: The item (i) is clear from (38), (39) and (40). The items (ii) and (iii) follow immediately from Theorem C (ii) and Theorem D (ii), respectively.
We also define the spaces U, V and W by the following Figure 9.
Figure 9.
The spaces U,V and W.
Recall that P4,θ and Q4,θ are illustrated in Figures 4 and 5, respectively. On the other hand, M4θ are illustrated in Figures 6 and 7. Then the following Theorem E is the main result on Problem 2.7 (iii).
Theorem E.The level setd4,θ−1ris given by the following tables.
For 0<θ≤π2, it is clear from (25) that M4θ⊂d4,θ−10. But Tables 4–6 imply that the equation M4θ=d4,θ−10 in fact holds.
In Theorem E, only the following two points are degenerate critical points of d4,θ: One is P4,θ, which is illustrated in Figure 4. The other is Q4,θ for θ=π2, which is illustrated in Figure 6.
When θ approaches π2 from below, the three terms M4θ, S1∐S1 and U in Table 4 collapse to Q4,θ for θ=π2.
In order to prove Theorem B, we consider the following three submanifolds of Xnθ:
The first submanifold is the point Pn,θ. (About Pn,θ, see Definition 2.4 (i) for the definition and Proposition 4.1 for the property.)
The second submanifold is Vnθ for odd n. (About Vnθ, see Definition 4.3 for the definition, and Lemma 4.4 and Proposition 4.5 for the property.)
The third submanifold is Σn, which is a point of Xnθ for the case n=2m+1, n≡3mod4 and θ=arccosmm+1. (About Σn, see Definition 4.6 for the definition, and Lemma 4.7 and Proposition 4.8 for the property.)
Proposition 4.1.Letnbe an even number that is greater than or equal to4. ThenPn,θis a degenerate critical point ofgn,θ, wherePn,θis defined in Definition 2.4 (i).
Remark 4.2. When n is an odd number, Pn,θ is a nondegenerate critical point.
Proofs of Proposition 4.1 and Remark 4.2: We prove by computing fn,θ∘T, where T is constructed in Lemma 2.1. Recall from Theorem 2.10 that the global maximum of fn,θ∘T is attained by eiϕ1…eiϕn−2, where ϕi=π for 1≤i≤n−2. Let Hfn,θ∘Teiπeiπ…eiπ be the Hessian matrix of fn,θ∘T at the point. We set
Ifn≡1mod4, then for allθ, Vnθis a subspace ofXnθ\fn,θ−10.
Assume thatnsatisfiesn≡3mod4. Then except for the caseθ=arccosmm+1, Vnθis a subspace ofXnθ\fn,θ−10.
Proof of Lemma 4.4: First, we prove the item (i). By direct computations, it is easy to prove that Vnθ is a critical manifold of fn,θ. Moreover, in Definition 4.3 (i), only ϕ4 is the parameter for Vnθ. Hence, Vnθ is diffeomorphic to S1. Similarly, in Definition 4.3 (ii), only ϕ3 is the parameter for Vnθ. Hence, Vnθ is also diffeomorphic to S1.
We can prove the item (ii) from direct computations. The item (iii) follows immediately from the item (ii).
As a corollary of Lemma 4.4, we have the following:
Proposition 4.5.Letn=2m+1be an odd number which is greater than or equal to7. Then except the case thatn≡3mod4andθ=arccosmm+1, gn,θis not a Morse function.
Proof: By Lemma 4.4 (i) and (iii), Vnθ is a critical manifold of gn,θ of positive dimension. Since nondegenerate critical points are isolated, the proposition follows.
In order to consider the remaining case other than Proposition 4.5, we give the following:
Definition 4.6. Let n=2m+1 be an odd number which is greater than or equal to 7 and n≡3mod4. We set
Proof of Theorem A: First we prove the item (i). As in the proof of Proposition 4.1, we prove by computing f5,θ∘T. By direct computations, we see that a degenerate critical point of f5,θ∘T has the form eiϕ1eiϕ2eiϕ3 for some
ϕ1ϕ2ϕ3∈0π×0π×0π.E52
We compute the eigenvalues of the Hessian matrix of f5,θ∘T at eiϕ1eiϕ2eiϕ3, where ϕ1ϕ2ϕ3 is as given in (52). An eigenvalue is a function on θ and we determine θ for which an eigenvalue is 0. Then we obtain (i).
The items (ii) and (iii) are proved in the process of proving the above item (i).
Proof of Theorem B: The theorem follows immediately from Propositions 4.1, 4.5 and 4.8.
Proof of Theorem C: By Theorem 2.10 (i), Ln,θ is attained uniquely by Pn,θ. Let a1 and a2 be as given in (9). If n=2m+1, then
Ln,θ=m+1a1+ma2.E53
Simplifying the right-hand side, we obtain Theorem C (i). Theorem C (ii) can be proved similarly.
Proof of Theorem D: By Theorem 2.9, the range of θ for which ℓn,θ=0 is known. Hence, we need to obtain an explicit formula of ℓn,θ when ℓn,θ>0. Recall from Theorem 2.10 (ii) that when ℓn,θ>0, it is attained uniquely by Qn,θ. We set
A≔−cosθ−sinθsinθ−cosθE54
Then similarly to (53), we have the following formula:
ℓn,θ=∑i=0n−1Ai10E55
Simplifying the right-hand side, we obtain Theorem D.
Proof of Theorem E: Since d4,θ−1r is a curve, it is easy to draw its shape. Then Theorem E follows.
Consider the case n=5. In Ref. [11], d5,θ−11 is denoted by C6θ and its topological type was determined as per the following Table 7, where following the Schläfli symbol, 6 denotes the regular hexagon.
θ
0π3
π3π2
π223π
23π
23ππ
Topological type
#3S1×S1
#3S1×S1
S2
6
∅
Table 7.
The topological type of C6θ.
In Ref. [11], Table 7 was proved as follows: Let R:C6θ→S1 be a certain map. For each ξ∈S1, we determine the topological type the level set R−1ξ. Then we obtain Table 7.
Below, we indicate that there is a chance to reprove Table 7 alternatively: For example, we consider the case θ=arccos−13. Then applying the Morse lemma to Table 2, we obtain the diffeomorphism
C6arccos−13≅S2.E56
If we construct a similar table to Table 2 for various θ, then we can reprove Table 7. This is our further problem.
References
1.Ali ZA, Han Z. Maneuvering control of hexrotor UAV equipped with a cable-driven gripper. IEEE Access. 2021;9:65308-65318. DOI: 10.1109/ACCESS.2021.3076129. Available from: https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=9417166 [Accessed: 1 September 2023]
2.Ali ZA, Li X. Modeling and controlling of quadrotor aerial vehicle equipped with a gripper. Measurement and Control. 2019;52:577-587. DOI: 10.1177/0020294019834040. Available from: https://journals.sagepub.com/doi/epub/10.1177/0020294019834040 [Accessed: 1 September 2023]
3.Ali ZA, Li X. Modeling and controlling the dynamic behavior of an aerial manipulator. Fluctuation and Noise Letters. 2021;20:2150044. DOI: 10.1142/S0219477521500449. Available from: https://www.worldscientific.com/doi/abs/10.1142/S0219477521500449?journalCode=fnl [Accessed: 1 September 2023]
4.Farber M. Invitation to topological robotics. In: Zurich Lectures in Advanced Mathematics. Zurich: European Mathematical Society; 2008. p. 143. DOI: 10.4171/054
5.Hausmann J-C. Sur la topologie des bras articulés. In: Algebraic topology Poznań 1989. Springer Lecture Notes in Mathematics. 1989;1474:146-159. DOI: 10.1007/BFB0084743
6.Walker K. Configuration Spaces of Linkages. NJ: Princeton; 1985. Available from: https://canyon23.net/math/1985thesis.pdf [Accessed: 1 September 2023]
7.Kapovich M, Millson J. On the moduli space of polygons in the Euclidean plane. Journal of Differential Geometry. 1995;42:430-464. DOI: 10.4310/jdg/1214457237. Available from: https://projecteuclid.org/journals/journal-of-differential-geometry/volume-42/issue-2/On-the-moduli-space-of-polygons-in-the-Euclidean-plane/10.4310/jdg/1214457237.full [Accessed: 1 September 2023]
8.Farber M, Schütz D. Homology of planar polygon spaces. Geometriae Dedicata. 2007;125:75-92. DOI: 10.1007/s10711-007-9139-7. Available from: https://link.springer.com/content/pdf/10.1007/s10711-007-9139-7.pdf [Accessed: 1 September 2023]
9.Demaine E, Langerman S, O’Rourke J. Geometric restrictions on producible polygonal protein chains. Algorithmica. 2006;44:167-181. DOI: 10.1007/s00453-005-1205-7. Available from: https://link.springer.com/article/10.1007/s00453-005-1205-7 [Accessed: 1 September 2023]
10.Soss M, Toussaint G. Geometric and computational aspects of polymer reconfiguration. Journal of Mathemtical Chemistry. 2000;27:303-318. DOI: 10.1023/A:1018823806289. Available from: https://link.springer.com/article/10.1023/A:1018823806289 [Accessed: 1 September 2023]
11.Kamiyama Y. The Topology of the Configuration Space of a Mathematical Model for Cycloalkenes: Advanced Topics of Topology. London, UK: IntechOpen; 2022. DOI: 10.5772/intechopen.100723. Available from: https://www.intechopen.com/chapters/79299 [Accessed: 1 September 2023]
12.Kamiyama Y. The differential structure on the configuration space of a mathematical model for cycloalkenes. JP Journal of Geometry and Topology. 2022;27:11-31. DOI: 110.17654/0972415X22002. Available from: http://www.pphmj.com/abstract/14276.htm [Accessed: 1 September 2023]
13.Kamiyama Y. A filtration of the configuration space of spatial polygons. Advanced Applied Discrete Mathematics. 2019;22:67-74. DOI: 10.17654/DM022010067. Available from: https://www.researchgate.net/publication/336117647_a_filtration_of_the_configuration_space_of_spatial_polygons [Accessed: 1 September 2023]
14.Benbernou N. Fixed-Angle Polygonal Chains: Locked Chains and the Maximum Span. MA: Smith College; 2006. Available from: http://people.csail.mit.edu/nbenbern/thesis.pdf [Accessed: 1 September 2023]
15.Benbernou N, O’Rourke J. On the maximum span of fixed-angle chains. In: 18th Canadian Conference on Computational Geometry. Kingston; 2006. pp. 14-16. Available from: http://people.csail.mit.edu/nbenbern/MaxSpan.CCCG.pdf [Accessed: 1 September 2023]
16.Crippen G. Exploring the conformation space of cycloalkanes by linearized embedding. Journal of Computational Chemistry. 1992;13:351-361. DOI: 10.1002/jcc.540130308. Available from: https://www.researchgate.net/publication/30839993_Exploring_the_conformation_space_of_cycloalkanes_by_linearized_embedding [Accessed: 1 September 2023]
Written By
Yasuhiko Kamiyama
Submitted: 18 August 2023Reviewed: 30 August 2023Published: 23 October 2023
 Open access peer-reviewed chapter
Open access peer-reviewed chapter