 Open access peer-reviewed chapter
Open access peer-reviewed chapter
Abstract
This chapter is concerned with drone navigation in unknown, indoor environments. This necessitates using the onboard LiDAR and IMU sensors to solve the simultaneous localization and mapping (SLAM) problem. Control barrier functions (CBFs) augmented with circulation constraints are designed for motion planning. CBFs ensure that the drone can safely navigate the unknown environment by avoiding obstacle collisions. The FAST-LIO package is used for SLAM and the generated OctoMap data are transmitted to the CBF-module motion planning algorithm. Simulation studies using the Gazebo Physics Engine with a coaxial hexarotor drone are provided to validate the efficacy of the suggested algorithm.
Keywords
- SLAM
- control barrier functions
- motion planning
- unmanned aerial vehicles
- safe navigation
1. Introduction
1.1 Motivation
Navigation in unknown environments [1] using Unmanned Aerial Vehicles (UAVs) is an important research area. This task requires integrating many different techniques and algorithms in obstacle avoidance, localization, mapping, and control. For a UAV operating outdoors [2], the integration of a Global Navigation Satellite System (GNSS) can provide accurate position information. When we consider indoor exploration, we cannot assume a consistent presence of GNSS signals. UAVs navigating in unknown indoor confined environments without GNSS coverage [3] provide significant challenges that jeopardize a safe autonomous mission.
1.2 Recent work
Previous works that handled this problem include [4], in which the UAV navigates in an unknown environment while requiring prior knowledge of certain features. Furthermore, Matos-Carvalho et al. [5] presents an algorithm for accurate indoor UAV navigation, using several fixed radio stations to improve the UAV positioning. Such solutions are however not applicable to navigation of purely unknown environments. In the case of multiple deployed agents, relative measurements have been used to guarantee formation control without external positioning [6], but the global planning problem remains unsolved.
The overall problem of safe navigation can be essentially divided into three different problems: (i) to map and locate the robot in the environment, (ii) to plan a movement that achieves the goal given the map, and (iii) to manipulate the lower-level controllers to follow the given plan.
For problem (i), the
With regard to odometry, vision provides an abundance of information, making it very useful for odometry estimation in UAVs. Camera-only [8] and vision-inertial sensor coupled odometry [9, 10] are viable options. In [11], a hybrid point-line feature-based localization is proposed for UAVs, without needing an IMU sensor. Similarly, deep neural networks are leveraged in [12] for UAV localization in emergency situations. A recent example of visual-inertial localization implementation aimed towards UAVs is described in [13].
Mapping entails storing a representation of the environment for future retrieval. Different representations that have been studied include visual features [11, 14], depth measurements [15, 16], and semantic descriptions [17]. For a more thorough coverage of issues pertaining to the SLAM problem at large, we direct the reader to [18], which covers both the front-end (sensor modality) and the back-end (representation and optimization) aspects of SLAM.
The problem (ii), the
Algorithms for motion planning in unknown environments have to handle two main problems: (a) providing efficient exploration strategies and (b) planning safe paths along this exploration. In this work, we provide a motion planning algorithm that achieves exploration through a careful selection of
For problem (iii), the
The
The coordinates of the target are known, specified in a world frame
The drone maintains a given height during its flight, that is, that the mission is achievable by selecting a suitable plane parallel to the ground. The
The drone is equipped with a LiDAR and IMU.
The drone’s lower-level inputs (motors’ thrust) can be controlled.
1.3 Contributions
Figure 1 shows schematics of the suggested approach. The “Algorithm” is divided into three modules: “SLAM”, “global planner” and “lower-level controller”. Each one of the modules will be discussed separately in the next subsections, but, overall, the “SLAM” module (Section 2) receives data from the sensors, providing the 2D position
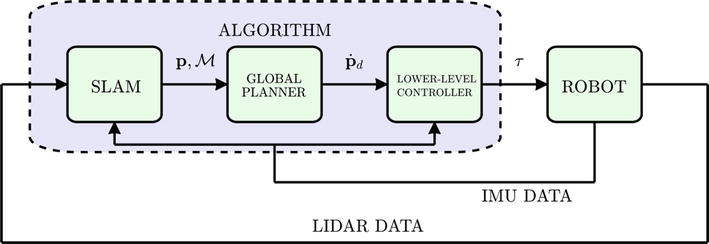
Figure 1.
Schematics of the algorithm.
More concretely, the contributions of this chapter include the use of CBFs with additional QP constraints to yield collision-free velocity commands. By keeping the outputs of the algorithm vehicle agnostic, the algorithm can be applied to any platform.
1.4 Organization
In Sections 2–4 the three modules displayed in Figure 1 are discussed. Then, in Section 5 simulation studies in the Gazebo environment showcase the algorithm’s operation. Finally, in Section 6 we give our concluding remarks.
2. Simultaneous localization and mapping (SLAM) module
The indoor navigation sensor suite is comprised of a 3D LiDAR sensor, attached on top of the UAV, as shown in Figure 2, an Inertial Measurement Unit (IMU) on the flight controller, and a downward-facing rangefinder placed underneath the UAV. The addition of the rangefinder provides a robust estimate of absolute distance to the ground since the LiDAR sensor is not expected to sense the floor due to its placement on the top of the vehicle.
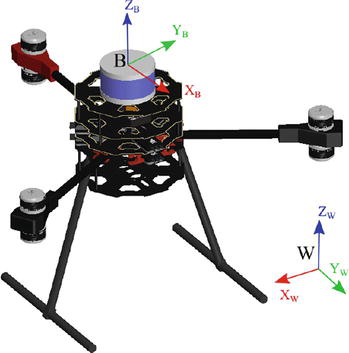
Figure 2.
Depiction of UAV agent with relevant coordinate frames.
The LiDAR point cloud and corresponding IMU measurements are fed to the FAST-LIO algorithm [32], which estimates odometry in a tightly-coupled iterated extended Kalman filter by fusing 3D feature points from LiDAR and measurements from IMU. Odometry from FAST-LIO is reliable for orientation and motion on the
An extended Kalman filter (EKF) [33] fuses IMU linear accelerations and angular velocities, rangefinder relative height measurements, and LiDAR-inertial odometry, resulting in an estimate of the UAV state. Let a world-fixed inertial frame be
Odometry estimates of the UAV are used as the basis for 3D occupancy grid mapping. Poses of LiDAR sensor measurements are integrated into a 3D occupancy grid map
If the point is within a certain distance from the sensor origin, denoted as
Instead of working with pure probabilities, the maximum likelihood estimate of the map
For a continuous mapping mission with insufficient feature variety in an environment, a loop closure module to account for odometry drifts may be required. Minuscule errors in pose estimation via visual or visual-inertial odometry accumulate to introduce large inconsistencies. However, the odometry estimation obtained via the aforementioned EKF formulation provides sufficient accuracy for an indoor environment. Indoor spaces are seldom larger than the coverage a commercial 3D LiDAR sensor can provide. Therefore, a loop closure module is omitted, and the odometry estimates are relied on solely for mapping. However, it is possible to implement a 3D map-based loop closure module, similar to the vision-based approaches [35] using an equivalent global descriptor for depth data [36].
In this work, the navigation requirements of the UAV are limited to 2D. As such, only the occupancy of a subset of the 3D grid in
The projection function given in (2) is conservative: the 2D coordinates are considered occupied even if a single point in the column of all points within the given height range is occupied, and the cell is considered free only if all of the points in the same column are free.
An example projection from a 3D map to a 2D map is provided in Figure 3(a). On the left is the binary OctoMap occupancy representation of the environment, color-coded based on the obstacle height. Upon projecting a height range of the map onto a 2D plane, the map representation on the right is obtained. Occupied, free, unknown, and frontier cells are represented in red, green, black, and magenta colors, respectively.
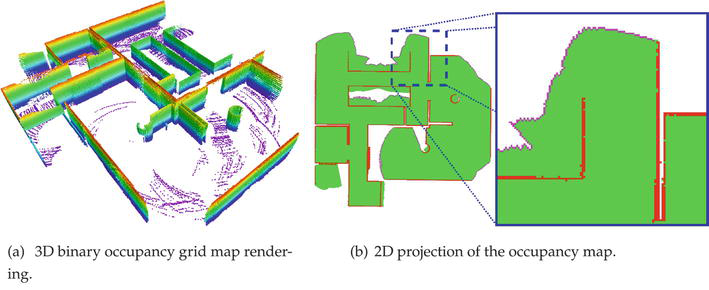
Figure 3.
A 3D rendering of the occupancy grid view, denoting the occupied cells with color coding, along with a sample 2D projection of the occupancy map. Occupied, free, unknown, and frontier cells are depicted in red, green, black, and magenta colors respectively. A zoomed-in view of the 2D occupancy map is provided for clarity.
3. “Global planner” module
Important concepts and subroutines will be clarified prior to the motion planning algorithm.
3.1 Map and distance functions
For the motion planning, the
It is essential for the motion planning algorithm to compute distances between the drone and the map in order to plan a safe path. Furthermore, distance gradients are also necessary for the approach. Before considering the geometry of the robot, we will be concerned with the distance between a
This function is always differentiable in the arguments
in which
The drone is modeled by a sphere of radius
3.2 Control barrier functions with circulation constraints
The utilized global planner needs a
Suppose the existence of a point
The following parameters of this formulation are defined:
Let
Let
Let
Let
Furthermore, define the
Both are well defined (i.e
This is a QP problem that always has a solution, and furthermore, this solution is unique because it is a strictly convex problem. Care must be taken when the problem is not well defined. This can be divided into three mutually exclusive conditions:
The planner can fail in three different cases: (i) because the third condition is reached, (ii) because the robot has reached a point in which
3.3 Local planner function
With the description given in the previous subsection, we can define the
which is at the core of the motion planning algorithm. It takes as arguments a
which plans many paths from
then
3.4 Vector field path tracking
The global planner periodically revises its plan and eventually commits the drone to a
3.5 Exploration graph generation
In order to run the motion planning algorithm, as the drone moves, a
Associated with this graph, the following functions can be found:
getNearestNodes is used to get a list of nodes, sorted by the Euclidean distance toCBFCircPlanMany is used in each one of them until the planner is successful. The first successful node is returned asupdateGraph function) if a path between that node and another node (already in the graph) exists.
3.6 Frontier points and frontier exploration
Eventually, the motion planner should request the robot to go to an unexplored region of the map [33]. For this, a function
A
The occupied channel
A sample of frontier points is marked in Figure 3(b), which can be seen as the magenta points in the zoomed-in view.
Once these points are obtained, an algorithm decides which point it is going to explore next. This is achieved by function
The algorithm’s structure is:
Step 1 : For each pointCBFCircPlanMany function is used to try to connectgetNearestNodes functions are tried. The points in which it was not possible to connect none of theseIf
ends , since most likely anything anymore can be explored.Otherwise, proceed to
Step 2 .
Step 2 : For each one of the positions inCBFCircPlanMany function is used to try to connect this point to theglobal target If
Step 3 .Otherwise, proceed to
Step 4 .
Step 3 : For each one of the positions inThe path length
The path length
getPath The path length
The path length
The point
ends . This metric is an estimate of how long the optimistic path from the current point
Step 4 : IfStep 3 is reproduced but with
3.7 The motion planning algorithm
With all the necessary functions introduced, the motion planning algorithm can be explained. Let the
The current committed path
The current graph
The current rotation parameter
The current goal
The current navigation mode
goingToGlobal orgoingToFrontier . It starts withgoingToGlobal ;The current list of nodes from
goingToGlobal , it does not matter how they are initialized.
As shown in Figure 1, the inputs of the algorithm are the current position
In a given frequency
A more detailed description of each sub-algorithm is shown in the sequel:
Algorithm A : running at a frequencyAlgorithm C below. It also sends commands to the lower-level controller.Step 1.A : Check whether the current goal is reached by checking ifIf this is false, go to
Step 2.A ;If this is true and
V ==goingToGlobal , the mission is accomplished andthe whole algorithm ends .If this is true and
V ==goingToFrontier , check whether the nodeIf not, set
Algorithm C and, when it halts, go toStep 2.A .If it was the last node of the list, set
V goingToGlobal , setAlgorithm C and, when it halts, go toStep 2.A .
Step 2.A : computeends .
Algorithm B : running at a frequencyfor a fixed time
S . Algorithm B thenends .Algorithm C : running at a frequencyAlgorithm A ). It is responsible to replan the targetStep 1.C : RunStep 2.C .Step 2.C : Replan the path to the current goal by runningfor a fixed time
If the algorithm was a success (
S ==TRUE ), setends (do not care aboutIf the algorithm fails (
S ==FALSE ), it means that very likely it is no use to try to go to the current target pointIf
S ==TRUE , setgoingToFrontier ,Step 2.C ;If
S ==FALSE , thewhole algorithm ends with failure , because there is nothing to explore anymore and the global goal was not found;
4. “Low-level controller” module
Given the desired 2D linear velocity
where
A low-level attitude controller runs on the UAV autopilot, relying on the ArduCopter firmware, controlling the vehicle’s orientation and commanding the signals to the motors. Using the vehicle mass
where
The ArduCopter autopilot uses a cascade PID structure to transform the desired orientation commands into angular velocities and subsequently desired moments, which are combined with the desired thrust result into throttle level commands for the motors, which is the vector

Figure 4.
Cascade PID structure of low-level attitude controller.
5. Simulation studies
To showcase the results of the algorithm, a warehouse-like Gazebo environment is used, depicted in Figure 5 in which the objective is to move from the starting position (magenta circle to the right) to the end position (green circle to the left). The goal is to go from a starting position
For the map generation : Both FAST-LIO and OctoMap build their respective maps with a voxel grid size ofFor the global planner :For the UAV controllers : For the first stage PID (angle) the ArduCopter has
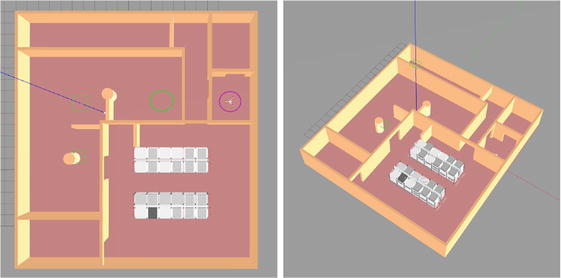
Figure 5.
Environment in two different perspectives.
Figures 6 and 7 show some snapshots of the algorithm at different times. Figure 7 also shows the graph
Figure 6
left-top : at the start, the drone is atgointToGlobal mode and, given the current map information (blue points), plan to go using a simple path (red dashed path) towards the global target (green start). Figure 6right-top : the point is still at the same mode. Figure 6left-middle : The robot still has hope to achieve the target. Figure 6right-middle : after realizing that it cannot go to the global target, the drone decides that the best plan is to try to go from above since so far it did not discover that it is impossible to go from there. It changes the circulation mode and goes to the top, still in thegointToGlobal mode. Figure 6left-bottom : after reaching the top, it realizes that it is blocked there as well: it is a dead-end. It decides to explore a frontier point (black dot) and enter thegoingToFrontier mode to approach this point. Figure 6right-bottom : after it travels all the nodes, it plans to go to the frontier point.Figure 7
left-top : the drone reaches the frontier point and switches back to thegointToGlobal , hoping to achieve the target given its current information of the map. Figure 7right-top : eventually it realizes that it is not possible using the planned path. It plans to explore again. Figure 6left-middle : it finds a point to explore and enters thegoingToFrontier mode. Note that there are no orange points this time: the list of the nodes to be traveled only contains the frontier pointright-middle : it goes back togointToGlobal , hoping to achieve the target given its current information on the map. Figure 6left-bottom : the robot completed the mission successfully. Figure 6right-bottom : graph structure
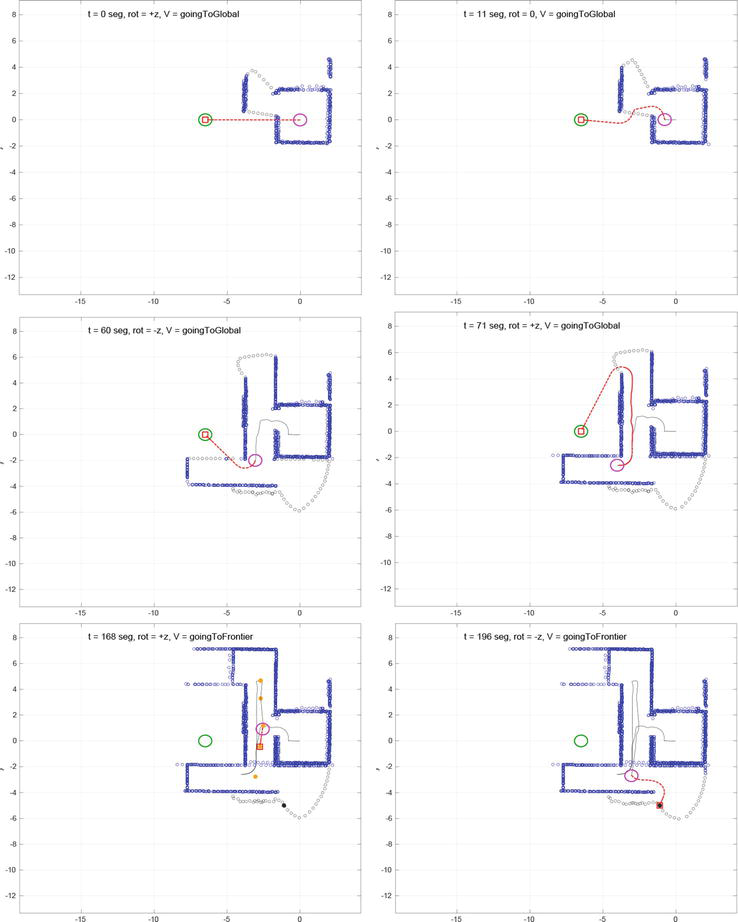
Figure 6.
Snapshots of the simulation.
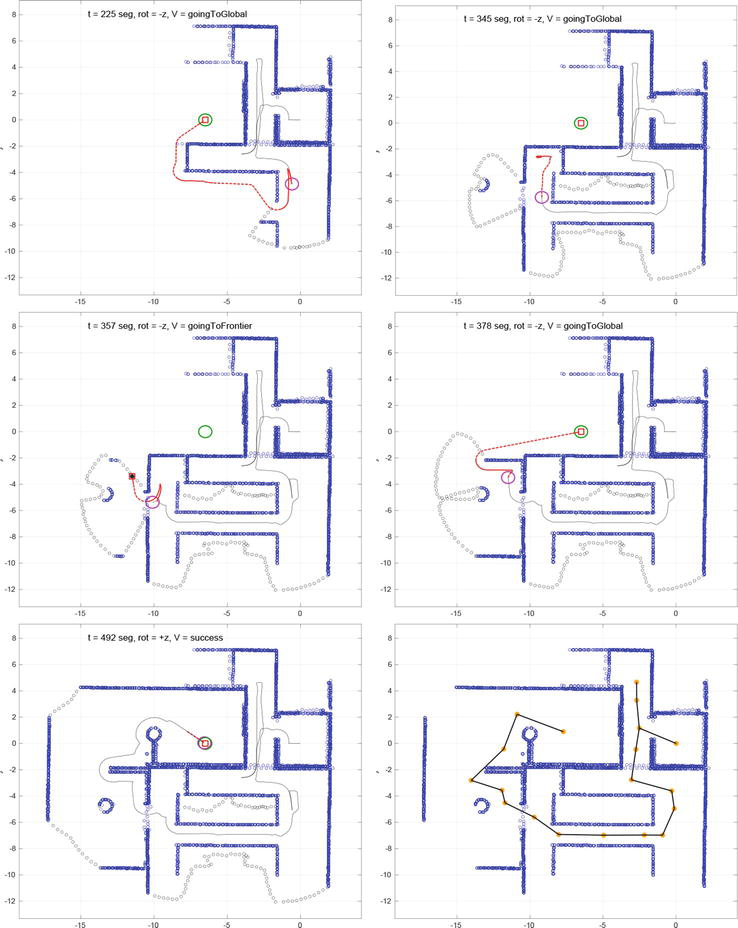
Figure 7.
Snapshots of the simulation and of the graph structure
6. Conclusion
In this chapter, a framework is provided for the autonomous navigation of a drone in a GNSS-denied and unknown environment, aiming to reach a target point while avoiding obstacles and being equipped with only a LiDAR and IMU. The 2D-navigation algorithm is divided into three modules, that were discussed in detail. We showcased how the algorithm works through a Gazebo simulation physics engine, in which the simulated drone successfully navigated safely towards the goal.
Acknowledgments
This work was partially supported by the NYUAD Center for Artificial Intelligence and Robotics (CAIR), funded by Tamkeen under the NYUAD Research Institute Award CG010.
References
- 1.
Arvanitakis I, Tzes A, Giannousakis K. Synergistic exploration and navigation of mobile robots under pose uncertainty in unknown environments. International Journal of Advanced Robotic Systems. 2018; 15 (1):1729881417750785 - 2.
Ilyas M, Ali ME, Rehman N, Abbasi AR. Design, development & evaluation of a prototype tracked mobile robot for difficult terrain. Sir Syed University Research Journal of Engineering & Technology. 2013; 3 (1):7-7 - 3.
Tzes M, Papatheodorou S, Tzes A. Visual area coverage by heterogeneous aerial agents under imprecise localization. IEEE Control Systems Letters. 2018; 2 (4):623-628 - 4.
Wang F, Wang K, Lai S, Phang SK, Chen BM, Lee TH. An efficient UAV navigation solution for confined but partially known indoor environments. In: 11th IEEE International Conference on Control & Automation (ICCA). Taichung, Taiwan: IEEE; 2014. pp. 1351-1356 - 5.
Matos-Carvalho JP, Santos R, Tomic S, Beko M. GTRS-based algorithm for UAV navigation in indoor environments employing range measurements and odometry. IEEE Access. 2021; 9 :89120-89132 - 6.
Evangeliou N, Chaikalis D, Tsoukalas A, Tzes A. Visual collaboration leader-follower UAV-formation for indoor exploration. Frontiers in Robotics and AI. 2022; 8 :777535 - 7.
Papatheodorou S, Tzes A, Giannousakis K, Stergiopoulos Y. Distributed area coverage control with imprecise robot localization: Simulation and experimental studies. International Journal of Advanced Robotic Systems. 2018; 15 (5):1729881418797494 - 8.
Aqel MO, Marhaban MH, Saripan MI, Ismail NB. Review of visual odometry: Types, approaches, challenges, and applications. Springerplus. 2016; 5 :1-26 - 9.
Huang G. Visual-inertial navigation: A concise review. In: 2019 International Conference on Robotics and Automation (ICRA). Montreal, Canada: IEEE; 2019. pp. 9572-9582 - 10.
Zeng B, Song C, Jun C, Kang Y. DFPC-SLAM: A dynamic feature point constraints-based SLAM using stereo vision for dynamic environment. Guidance, Navigation and Control. 2023; 3 (01):2350003 - 11.
Wang H, Wang Z, Liu Q, Gao Y. Multi-features visual odometry for indoor mapping of UAV. In: 2020 3rd International Conference on Unmanned Systems (ICUS). Harbin, China: IEEE; 2020. pp. 203-208 - 12.
Steenbeek A, Nex F. CNN-based dense monocular visual SLAM for real-time UAV exploration in emergency conditions. Drones. 2022; 6 (3):79 - 13.
Moura A, Antunes J, Dias A, Martins A, Almeida J. Graph-SLAM approach for indoor UAV localization in warehouse logistics applications. In: 2021 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC). Santa Maria, Portugal: IEEE; 2021. pp. 4-11 - 14.
Campos C, Elvira R, Rodrguez JJG, Montiel JM, Tardós JD. ORB-SLAM3: An accurate open-source library for visual, visual–inertial, and multimap slam. IEEE Transactions on Robotics. 2021; 37 (6):1874-1890 - 15.
Xin C, Wu G, Zhang C, Chen K, Wang J, Wang X. Research on indoor navigation system of UAV based on lidar. In: 2020 12th International Conference on Measuring Technology and Mechatronics Automation (ICMTMA). Phucket, Thailand: IEEE; 2020. pp. 763-766 - 16.
Santos MC, Santana LV, Brandao AS, Sarcinelli-Filho M. UAV obstacle avoidance using RGB-D system. 2015 International Conference on Unmanned Aircraft Systems (ICUAS). IEEE; 2015. pp. 312–319 - 17.
Kostavelis I, Gasteratos A. Semantic mapping for mobile robotics tasks: A survey. Robotics and Autonomous Systems. 2015; 66 :86-103 - 18.
Cadena C, Carlone L, Carrillo H, Latif Y, Scaramuzza D, Neira J, et al. Past, present, and future of simultaneous localization and mapping: Toward the robust-perception age. IEEE Transactions on Robotics. 2016; 32 (6):1309-1332 - 19.
Ali ZA, Zhangang H, Hang WB. Cooperative path planning of multiple UAVs by using max–min ant colony optimization along with cauchy mutant operator. Fluctuation and Noise Letters. 2021; 20 (01):2150002 - 20.
LaValle SM, Kuffner Jr JJ. Randomized kinodynamic planning. The International Journal of Robotics Research. 2001; 20 (5):378-400 - 21.
Kavraki LE, Svestka P, Latombe JC, Overmars MH. Probabilistic roadmaps for path planning in high-dimensional configuration spaces. IEEE Transactions on Robotics and Automation. 1996; 12 (4):566-580 - 22.
Aggarwal S, Kumar N. Path planning techniques for unmanned aerial vehicles: A review, solutions, and challenges. Computer Communications. 2020; 149 :270-299 - 23.
Yang L, Qi J, Song D, Xiao J, Han J, Xia Y. Survey of robot 3D path planning algorithms. Journal of Control Science and Engineering. 2016; 2016 :1-22 - 24.
Maini P, Sujit P. Path planning for a UAV with kinematic constraints in the presence of polygonal obstacles. In: 2016 International Conference on Unmanned Aircraft Systems (ICUAS). Arlington, VA, USA: IEEE; 2016. pp. 62-67 - 25.
Delamer JA, Watanabe Y, Chanel CP. Safe path planning for UAV urban operation under GNSS signal occlusion risk. Robotics and Autonomous Systems. 2021; 142 :103800 - 26.
Padhy RP, Verma S, Ahmad S, Choudhury SK, Sa PK. Deep neural network for autonomous navigation in indoor corridor environments. Procedia Computer Science. 2018; 133 :643-650 - 27.
Walker O, Vanegas F, Gonzalez F, Koenig S. A deep reinforcement learning framework for UAV navigation in indoor environments. In: 2019 IEEE Aerospace Conference. IEEE; 2019. pp. 1–14 - 28.
Ames AD, Coogan S, Egerstedt M, Notomista G, Sreenath K, Tabuada P. Control barrier functions: Theory and applications. In: 2019 18th European Control Conference. 2019. pp. 3420-3431 - 29.
Gonçalves VM, Krishnamurthy P, Tzes A, Khorrami F. Avoiding undesirable equilibria in control barrier function approaches for multi-robot planar systems. In: 2023 31st Mediterranean Conference on Control and Automation (MED). Limassol, Cyprus: IEEE; 2023. pp. 376-381 - 30.
Rezende AMC, Goncalves VM, Pimenta LCA. Constructive time-varying vector fields for robot navigation. IEEE Transactions on Robotics. 2022; 38 (2):852-867 - 31.
Chaikalis D, Evangeliou N, Nabeel M, Giakoumidis N, Tzes A. Mechatronic design and control of a hybrid ground-air-water autonomous vehicle. In: 2023 International Conference on Unmanned Aircraft Systems (ICUAS). 2023. pp. 1337-1342 - 32.
Xu W, Zhang F. Fast-LIO: A fast, robust lidar-inertial odometry package by tightly-coupled iterated Kalman filter. IEEE Robotics and Automation Letters. 2021; 6 (2):3317-3324 - 33.
Unlu HU, Chaikalis D, Tsoukalas A, Tzes A. UAV indoor exploration for fire-target detection and extinguishing. Journal of Intelligent & Robotic Systems. 2023; 108 (3):54 - 34.
Hornung A, Wurm KM, Bennewitz M, Stachniss C, Burgard W. OctoMap: An efficient probabilistic 3D mapping framework based on octrees. Autonomous Robots. 2013; 34 :189-206 - 35.
Labbé M, Michaud F. RTAB-Map as an open-source LiDAR and visual simultaneous localization and mapping library for large-scale and long-term online operation. Journal of Field Robotics. 2019; 36 (2):416-446 - 36.
Kim G, Kim A. Scan context: Egocentric spatial descriptor for place recognition within 3d point cloud map. In: 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Madrid, Spain: IEEE; 2018. pp. 4802-4809 - 37.
Gao B, Pavel L. On the properties of the Softmax function with application in game theory and reinforcement learning. ArXiv:1704.00805. 2017