Open Access is an initiative that aims to make scientific research freely available to all. To date our community has made over 100 million downloads. It’s based on principles of collaboration, unobstructed discovery, and, most importantly, scientific progression. As PhD students, we found it difficult to access the research we needed, so we decided to create a new Open Access publisher that levels the playing field for scientists across the world. How? By making research easy to access, and puts the academic needs of the researchers before the business interests of publishers.
We are a community of more than 103,000 authors and editors from 3,291 institutions spanning 160 countries, including Nobel Prize winners and some of the world’s most-cited researchers. Publishing on IntechOpen allows authors to earn citations and find new collaborators, meaning more people see your work not only from your own field of study, but from other related fields too.
To purchase hard copies of this book, please contact the representative in India:
CBS Publishers & Distributors Pvt. Ltd.
www.cbspd.com
|
customercare@cbspd.com
Finding consensus is one of the most important tasks in multi-agent robot motion coordination research, especially in a communication environment. This justification underlies the use of event-triggered controller in current multi-agent consensus research. However, the communication issue has not been adequately addressed in a broadcast communication environment for rendezvous applications. Therefore, the broadcast event-triggered (BET) controller with a new formulation was designed using the Simultaneous Perturbation Stochastic Algorithm (SPSA). Theorems and relevant proofs were presented. Agent performances with the BET controller were evaluated and compared with the conventional broadcast time-triggered (BTT) controller. The results showed an effective motion generated by a multi-agent robot to reach the rendezvous point based on the Bernoulli distribution and gradient approximation of the agent local controller. The BET controller has proven to work more efficiently than the BTT controller when it reaches convergence in less than 40.42% of time and 21.00% of iterations on average. The utilization of communication channels is slightly reduced for BET, which is 71.09% usage instead of fully utilized by BTT. The threshold value of the event-triggered function (ETF) and SPSA parameters affected agent performances. Future research may consider using an effective and efficient BET controller in a complex communication environment with many variations of graph topology networks.
School of Engineering, Faculty of Innovation and Technology, Taylor’s University, Subang Jaya, Selangor, Malaysia
Zool Hilmi Ismail
Centre for Artificial Intelligence and Robotics (CAIRO), Malaysia-Japan International Institute of Technology (MJIT), Universiti Teknologi Malaysia, Jalan Sultan Yahya Petra, Kuala Lumpur, Malaysia
Ahmad Shah Hizam Md Yasir
Faculty of Resilience, Rabdan Academy, Abu Dhabi, United Arab Emirates
Denesh Sooriamoorthy
School of Engineering, Asia Pacific University, Kuala Lumpur, Malaysia
Puteri Nor Aznie Fahsyar Syed Mahadzir
School of Engineering, Faculty of Innovation and Technology, Taylor’s University, Subang Jaya, Selangor, Malaysia
*Address all correspondence to: nohaiddasariff@yahoo.com, Nohaidda.Sariff@taylors.edu.my
1. Introduction
1.1 Motivation of the research
The effectiveness and robustness of multi-agent robot systems (MARS) [1, 2, 3, 4] in carrying out tasks as compared to single agent [5, 6, 7] has led to an expansion in the MARS research. The advantages of having MARS that may increase the flexibility and scalability as well as reduce load among agents, makes cooperative MARS research still active until present day. Example of applications with MARS such as medical robots known as the nano [8] and magnetic robot [9] have been used to send medicine directly to the human organ, inspection robots to inspect and clean pipelines in oil and gas industries [10, 11], planetary rovers [12, 13], unmanned aerial vehicles [14, 15, 16, 17, 18], and swarm robots [19, 20]. Due to the importance of MARS in assisting human activities, several researchers have been actively reviewing and discussed a variety of issues related to cooperative MARS [2, 21, 22] such as formation [23, 24, 25, 26, 27], consensus [28, 29, 30], containment [31, 32, 33], tracking [34], and rendezvous [29, 35, 36, 37].
One of the issues that researchers pay a lot of attention to in motion coordination of MARS is consensus subject to the difficulties of agent to find an agreement between agents to a certain degree [22, 38, 39]. Various researchers proposed to develop an effective communication and control system to be used practically in MARS consensus applications. Issues related to limited communication resources [40, 41], time delay [42, 43, 44], and disturbances [45, 46, 47] are among the communication problems which might affect an agent to reach consensus.
Finding strategies to limit the usage of agent resources such as communication [48, 49, 50, 51, 52] and energy [16, 53, 54, 55, 56] has been emphasized in consensus research. This is to ensure that the consensus controller is feasible and practical to be used. Therefore, minimizing communication usage and energy resources is not an option in consensus, especially when the agent is embedded with constrained controller board resources. As a result, an event-based system [35, 47, 57, 58, 59] has been used to reduce communication in terms of the number of communication channels utilised for transmission while also preserving bandwidth coverage. Other examples of research concentrating on decreasing energy resources from trajectory [52] and actuator [53] are energy-awareness or energy-efficiency [16, 60, 61, 62]. The lifespan of a MARS can be increased by conserving resources, which also increases the significance of this research for MARS in practical applications.
In addition, a hybrid controller was developed to provide a robust system that can ensure that the consensus task may be accomplished effectively. Sliding mode controller [46], fuzzy logic techniques [63, 64, 65, 66, 67, 68, 69], model predictive control [70], distributed control [49, 63, 71, 72, 73, 74], and dynamic role assignment [75] are a few examples of hybrid controllers that have been used for multi-agent robot formation, rendezvous, and path planning [76, 77, 78, 79, 80, 81] applications. In order to identify the consensus system efficiently and conserve the agent’s communication and resources, these controllers have been coupled with an event-based system [45, 70, 71, 82, 83].
In relation to wireless network technology, there is a need for a consensus study since the network topologies exist between the agent and its neighbours [29, 73, 84, 85]. For instance, the communication between the UAV ground mobile robot via the network on the air and the ground [86], the communication between the heterogeneous UAV and the satellite and ground station [87], and the communication between the cluster multi-agent and the network topology [88]. Since the agents are connected in a network topology of information flow either directed [89, 90] or undirected [91, 92], one way or two-way communications, one-to-one or broadcast [25, 31, 58, 93, 94, 95, 96, 97, 98], finding consensus can therefore be considered challenging due to the complexity of the network.
The importance of MARS motion coordination consensus research was proven from the above discussion. When communication problems arise in the broadcast and communication contexts, the agent’s performances such as utilization of agent resources and energy levels may be impacted. This served as the impetus for putting up a remedy and plan to create a successful and effective consensus control and communication system. Although some studies on event-triggered have been proposed for consensus research studies such as average consensus [58, 59, 73, 85, 99, 100, 101, 102], leader follower consensus [103], and other consensus or rendezvous control systems [29, 35, 36, 46, 63, 70, 71, 82, 88, 103, 104, 105, 106, 107, 108, 109, 110, 111, 112], research on resolving the communication problem for the application of rendezvous in a broadcast communication environment has yet to be explored.
1.2 Related work
The validity of the MARS motion coordination research was proven when several researchers kept improvising the control and communication systems, especially for consensus problems. For better understanding, this section will discuss the two main important findings found in the literature, which have been divided into two categories: the development of MARS consensus control and event-based consensus.
1.2.1 Multi-agent robot system consensus
The consensus of multi-agents is among the issues that have attracted many researchers’ attention in the past few years [22, 38]. An agreement between agents can be achieved via an appropriate communication and control system to reach certain quantities of interest. Therefore, various control and communication issues related to multi-agent consensus have been discussed to show the recent issues in multi-agent consensus. The development of consensus control depends on the issues solved for every single application. Some focus on velocity and positional consensus issues. The consensus on velocity leads to a collective behaviour where the agents can move with a common velocity, while the consensus on position drives all agents to a common position. Formation [27], tracking [113], and rendezvous [114, 115] were among the consensus applications being focused on by researchers.
Since communication will determine the realization of consensus, a recent development of multi-agent consensus research focusing on communication issues such as time delay [42, 112], disturbances [45, 71], and limited resources [64, 70] has been evident. Therefore, an alternative to broadcast [113, 114, 115, 116, 117] and agent-to-agent [102, 118] communication has been introduced, as well as sampling methods such as time-triggered, periodic, aperiodic, or event-triggered. However, the MARS consensus for rendezvous applications was extended in this research. Applied to a group of leaderless agents with a double integrator system, the issue of communication among agents in a broadcast communication environment has been proposed to determine the realization of multi-agent consensus for practical rendezvous applications. The main objective is to find positional consensus among the multi-agents with zero velocities and acceleration when the rendezvous point is achieved.
1.2.2 Event-based consensus
The idea of event-based sampling was proposed by Astrom et al. [119] in early 1999, while many researchers applied the multi-agent control issue [38, 81, 106, 107]. The objective of having ET is to save communication resources and computation, where the sample data will be sent to the agent and the control update will only occur when it meets the event-triggered function (ETF).
The evolution of event-based control shows that it has been applied initially with a single integrator or order [110], followed by a second order [118], and more recently in a fourth order control system [83] for MARS. Based on positive research outcomes, the ET has thus been recently extended with other intelligent control systems such as Sliding Mode Control [70], adaptive fuzzy [64], and Model Predictive Control [69]. These controllers were integrated with an event-based system, which guaranteed the efficiency of the tracking, formation, and positioning systems in terms of resource utilization.
1.3 Contributions
The broadcast controller has been combined with the event-triggered controller using simultaneous perturbation stochastic algorithm (SPSA) for the rendezvous application for MARS which is the main contribution of this paper [113, 114]. The agents should be able to agree on the rendezvous point while maintaining their performance in terms of convergence time and iteration, trajectory pattern, and number of communication channels. The proposed theorems and proofs are well presented and discussed. Besides that, the broadcast time-triggered (BTT) system, known as a traditional sample technique [95, 97, 98], has been used in this case study as a comparison to the broadcast event-triggered (BET) control system. The effectiveness and efficiency of a new BET control system are evaluated and proven based on the results obtained. Lastly, the effects of SPSA parameter and ET controller changes on agent performances were observed and analyzed. This will be yet another contribution that illustrates the relationship between these hybrid BET controller parameters and agent outputs within the context of the broadcast and communication environment.
1.4 Organization of the chapter
The sections of this paper are structured as follows: the first section and second section presents the introduction and formulation of the problem, the third section focuses on the design of a new BET controller with discussion on related theorems and proof, the fourth section explains the effectiveness and efficiency evaluation of multi-agent robot performances with BET and BTT, the fifth section explains the SPSA and ETF effects on agent performances, and the final section is the conclusion with some recommendations for MARS motion coordination research direction.
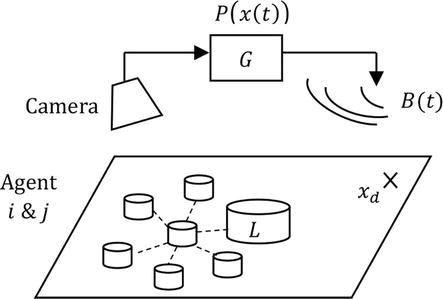
Assume a dynamic linear group of agents i connected with neighbours jin an undirected topology network located within the broadcast communication environment as shown in Figure 1. The agent has to communicate among themselves to reach consensus to rendezvous point xd while continuously receiving global feedback Bt from global controller . This is to satisfy the motion coordination task in a such a way that the value of Pxt=0which shows the convergence achieved as derived from Eqs. (1) and (2).
Figure 1.
Multi-agent robot working environment.
Referring to this environment, the agents have limited knowledge of its environment whereby the system does not provide any global coordinates and the agents will rely more on their relative position during communication. Due to this situation, it may cause high utilization of communication resources such as channel and bandwidth required when the agent must communicate continuously to reach consensus to the desired rendezvous point. This might get worse if the number of agents increased and the location of the target is quite far from the agent. The communication issue must be considered as it might affect the effectiveness and the efficiency of the agent, especially when the agent is supplied with limited power from the microcontroller board. The agent’s performances such as time and iteration are taken as well as trajectory will get effected until convergence is achieved. While various problems had been solved in the scope of agent in broadcast and communication environment such as quantization [97], collision avoidance [115], instability [95], consensus [98, 116], and event-triggered [35, 64, 117, 118], the communication problem within the range of broadcast and communication environment still remains unsolved.
Notation: Denote R is the real number, R+ is a set of positive real numbers, n is sample size, and N is the population size. The state position of agent in Euclidean coordinates is represented by vector while xis expressed by xit=x1x2x3….xnT∈Rn. The function represented by fx, β SPSA random and deterministic movement, α state function, and γ ETF. Assume e is the measurement error, Li local controller, G global controller, B broadcast signal ∈R,Aiagent number, Pxt is performances index measurement, t∈Nis discrete time, (t+1) ∈Nis next discrete time, and ui,j,R,D1,D2 is control input. The agent i is connected with its own neighbor set j∈Ni in undirected graph G=VEwhere V is vertex represent the agent and Eis the edge of each vertex represent the connection between i and j.
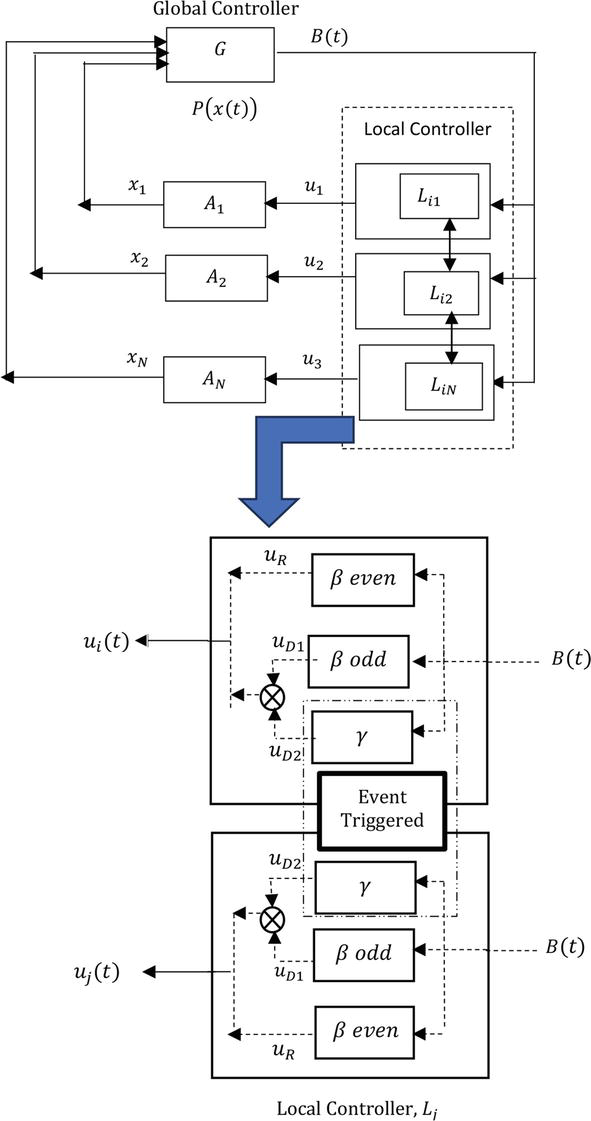
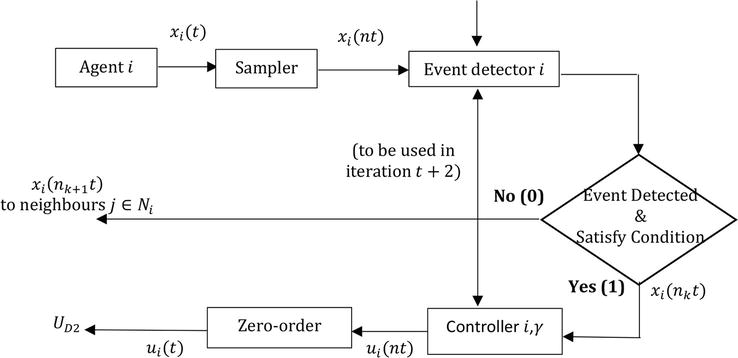
The overall design of this controller is based on the SPSA where the unknown gradient, which is the state position, will be generated using simultaneous perturbation approximation as shown in Figure 2. Measurement of two objective functions is required in this process instead of the overall dimension of agent state position. Firstly, the digital camera will capture the image of the agent’s position and update xit in the system. The global controller Gcompute the performances index Pxt of the scalar value which indicates the distance between the agent’s and rendezvous point to send Bt to the local controller Li. The local controller then computes agent control input ui(t) based on random Bernoulli distribution error and gradient approximation with event-triggered error as shown on the right side of Figure 2. Lastly, each agent Ai will update the next position xit+1 based on the latest value of control input. This process continuously iterates until all agents reach consensus at the rendezvous point. When the system reaches convergence, agent performances will be evaluated and recorded such as convergence time and iteration, number of channels (NOCs), as well as agent trajectory to determine the effectiveness and efficiency of the system. A detailed description of agent state position, global controller, local controller, ETF, and agent motion are explained in the section below.
Figure 2.
BET controller design.
Agent state position,xi
The agent state position of xi0=x10x20x30…∈Rn depends on the image from the digital camera. A collective agent position in Cartesian coordinates can be represented as the Euclidean norm of the vector xit=∣x1t,x2t,x3t∣∈Rn. These positions update will be continuously sent to the global controller until the agent meets the rendezvous point.
Global controller,G
The performances of agent were measured based on the degree of agent reaching consensus indicated by the distance between the agent with the rendezvous point as presented by Eqs. (1) and (3). Bt∈R represents the output of global controller, xt∈RnNis the collective state position of agents, and Px∈R is the objective function of rendezvous.
G:Bt=PxtE3
Local controller,Li
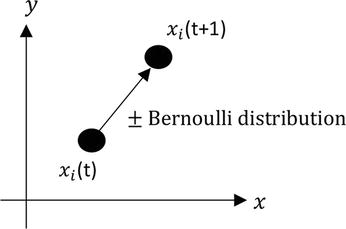
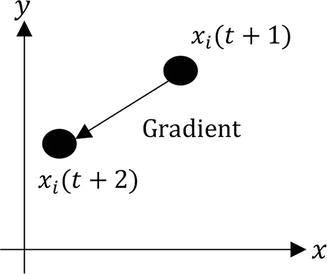
The local controller or known as distributed controller will determine the agent movement Aiat every even and odd t time based on the input from broadcast signal Bt∈R. The variables of the control system are represented by a column vector as shown in Eq. (4) where δi1t is the state position, δi2t is the broadcast signal, δi3t is the even movement and δi4t is the odd movement. Three main functions which might affect the output of uit∈R (Eq. (5)) are α:Rv×R→Rv is the state function, β:RvXR→Rv is the random and deterministic function of SPSA, and γ:Rv×R→Rv is the standard consensus protocol with ET as stated in Eqs. (6)–(8). As a result, the random error of Bernoulli represented by β even and the deterministic error of SPSA approximation with communication error of ET represented by β odd will determine the agent’s movement as shown in Figures 3 and 4.
The control input of uD2 of each agent is determine by the event-triggered process as shown in Figure 5. The purpose of having an event-triggered in the local controller is to reduce communication among agents where the communication among agent i and its neighbour j∈Ni will only happen if the event detected and satisfy the ETF as shown Eq. (9)Eq. (10) indicates the state measurement error between the agent position during the instant event tk+1iand the previous event tki while Eq. (11) is a threshold value or state dependent value which depends on the agent’s state position and neighbour’s state position.
Figure 5.
Agent i event-triggered controller,γ.
Initially, the state of xit is sample by a sampler at every odd time and become xint. The event detector will monitor the event based on the given sample. The new update sample state of agent i,xink+1t will be sent to the neighbour j if the event detector detects an event. Right after the neighbours j received the state sent by agent i, it will update the agent i state information and store the newly received state values of agent i,xint. This state will then be used by the controller and event detector of agent j until the next event is triggered from agenti. When there is no event, the sample of agent position xinkt will directly be sent to the controller by means of no transmission and a control update will be required at this time. The control signal is held constant until the next event is controlled by having a zero-order holed in the system.
feitxit≥σizitE9
eit=xitki−xitE10
zit=∑j∈Niaijxit−xjtE11
Agent motion,Ai
The state position of agent Ait at t+1 is based on the latest control input uitobtained from the local controller Li as Eq. (12)
Ai:xit+1=xit+uitE12
3.1 Proposed theorems
Two relevant theorems were proposed which are convergence of the average consensus of distributed controller as Theorem 1 and convergence of BET consensus controller as Theorem 2. The theorems provided with proof derived from theoretical studies as well as proven in the real experiment.
Theorem 1: Control input from communication between the agent and neighbours will affect the agent linear discrete system dynamics. When the system violates the ETF function, the measurement error will be sent by the agent to the neighbours to update the control input whereas if the system satisfies the ETF function, the information will not be sent. The average consensus among the agents is marginally stabilize at t→∞and reach a steady state error as proven in Gershgorin circle when the Perron matrix eigenvalue is equal to λand Lyapunov stability that indicates the definite negative when V<0.
Proof 1: Eigenvalues of Perron matrix and Gershgorin circle unit
The dynamic of the system is represented in Eq. (13) by substituting the state measurement error,
By substituting agent measurement error into Eq. (14), the latest agent state xi(tki) =xit̂ is equivalent to
xt+1=Peeit+xitE15
The new state position of Eq. (15) will be sent to the connected neighbors for the control update when the ETF is violated, event occurs and the error eit will simultaneously counted and updated. When ETF is satisfied, there is no event and communication happening between the agent and neighbors which might cause the value of error equal to 0. At this point, the agent state value will remain the same when the sampled data is not updated.
Even though the agent’s next state value xt+1 as shown in Eq. (15) above affected from the state measurement error, the average consensus among connected agents was guaranteed to be achieved when the eigenvalues of square matrix P is strictly contained in the Gershgorin circle criterion. The values of eigen in Gershgorin circle unit was expected to be λ10=1 and the eigenvalues of Perron matrix for a topology of 10 agents strongly connected with an undirected graph areλ1=0,λ2=0.5±0.5iandλ10=1.
Proof 2: Lyapunov stability
Eq. (16) of Lyapunov when Lx≜y=y1y2….yNT, represents as Eq. (17)
Fora>0,V̇ can bound by using inequalityxy≤a2x2+12ay2, thus
V̇≤−∑iyi2+∑iaNiyi2+∑i12aNiyi2+∑i∑j∈Ni12ayj2E19
Since the communication graph is undirected,
∑i∑j∈Ni12aej2=∑i∑j∈Ni12aei2=∑i12a∣Ni∣ei2E20
Therefore, the final Lyapunov derivation will be negative definite for 0<σi<1 which shows that the system was stable.
V̇≤−∑i1−aNiyi2+∑i1a∣Ni∣ei2
V̇≤∑iσi−11−aNiyi2E21
Theorem 2: Given the objective function of BET consensus controller as stated in Eq. (1), the vector of xt∈RnN which indicates the movement of agent will keep changing until satisfying ∇Pxt=0. Let Li, Gand ETF be given by Eqs. (1)–(11). If BET fulfil Theorem 1 and conditions below,
(B1) ∆i1t,∆i2t,…….∆iNtare Bernoulli random probability distribution.
(B2) at=at+1and ct=ct+1 for every t∈024…,∑t=0∞at=∞,and ∑t=0∞ct=∞
(B3) xtis stable under gradient system approximation of xt=−∇Pxṫwhere xt∈RnNand the stability is in the Lyapunov sense.
(B4) E[Pxt+ct∆tis bounded for all t∈N
(B5) supt∈Nxt<∞w.p.1
(B6)Px , the performance index value change at t time
(B7) 0 <k<1/N, then limt→∞xit−xjt=0
(B8) feitxit≤σizit,then eit=0, else eit=xit̂-xit
then,
limt→∞xt=xd with probability 1 is achieved.
Proof 3: Consensus among agent with BET
The agent’s movement is subject to the global (Eq. (1)), local (Eq. (5), and event-triggered (Eq. (9)) functions from (t=0) until t→∞ and achieved convergence with probability 1 under the above B1–B8 conditions.
The next agent state position at even time t∈024….. and odd time 135….. will depend on Eqs. (21) and (22).
Bt=PxtE22
Bt+1=Pxt+ct+∆itE23
For t∈024….., the agent movement with BET is represented by Eq. (24).
The collective of agent dynamic movement will reach convergence when all agents meet rendezvous point of xdafter executing Theorem 1 and Theorem 2.
If the condition of broadcast with SPSA convergence satisfy (B1–B6) and conditions of ET satisfy (B7 and B8), it shows that all agents reached the rendezvous desired targetxd. The broadcast settings of B1 and B2 as well as B7 and B8 are imposed tuning for Liand G as defined in Eqs. (1)–(11).
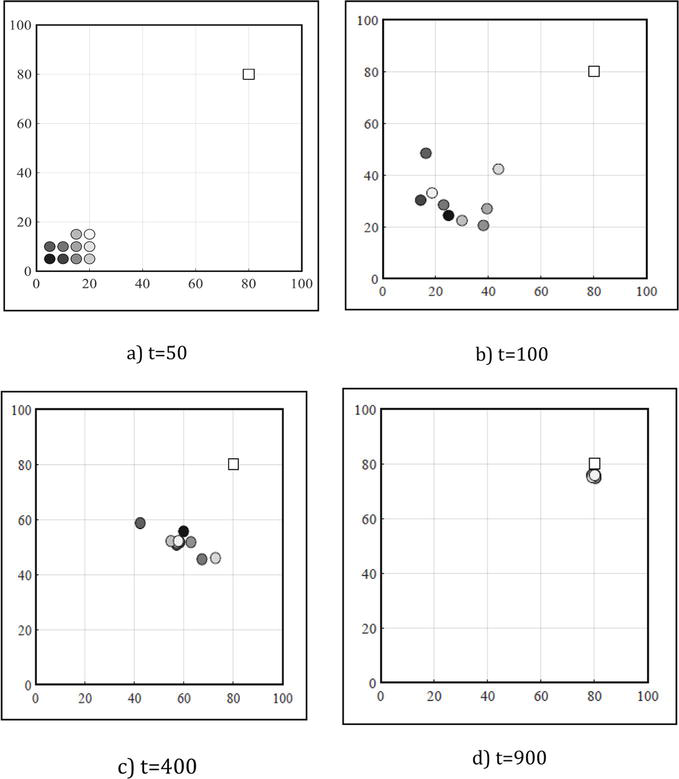
The 10 homogeneous agents were located at 10 initial positions within the workspace area with 1 target point in the 2D Cartesian coordinates as shown in Figure 6a. The BET controller was designed completely with the SPSA algorithm with local and global controllers. Optimal settings of the SPSA based on investigation conducted [120, 121] was used as a reference and the final value applied for this case study which are a=0.2,A1=30,α1=0.6,c=1,γ1=0.06,ak=a/t+1+Aα1and ck=c/t+1γ1. With the local controller, the agent will determine the next position based on the stochastic and deterministic rule during even and odd times. Since the agent will communicate among them, the error in communication will also affect the agent’s next position. The global controller at the same time will broadcast the signal continuously to the agent to update on the agent’s location with the rendezvous point.
Figure 6.
Agent motion and location when t = 50, 100, 400, and 900. a. t = 50. b. t = 100. c. t = 400. d. t = 900.
From this, it was proven that the controller works effectively by creating a motion of agents to reach consensus among them until they reach the rendezvous point in average of 84.24 s and 676.6 iteration in 10 times run. The movement was recorded in a one-time run as shown in Figure 6. From Table 1, the NOC was proven to be reduced by 21.79% with a total of 5520 channels used based on the below calculation,
Time (sec)
20.4
40.8
61.2
81.6
102
122.4
142.8
163.2
183.6
204
225.2
Iteration
100
200
300
400
500
600
700
800
900
1000
1104
NOC
248
181
177
255
436
500
500
500
500
500
520
Table 1.
NOCs per 100 iterations.
Total of iteration=1104/2=552iterations.
Timeperiteration=225.42/1104=0.204s.
Each iteration is equivalent to 10 channels which carried a total of 552*10 = 5520 channels.
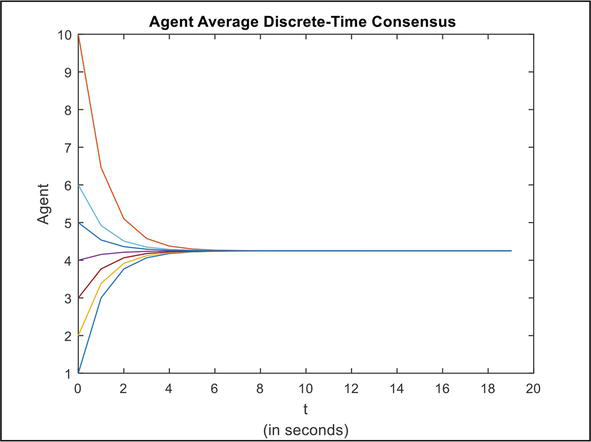
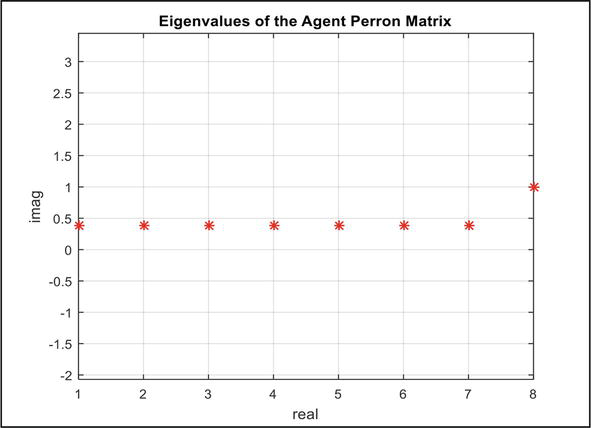
In order to prove the first theorem, which consensus achieved among the agents, the results shown in Figure 7 were proven. The agents were proven to reach the average local consensus successfully when it met at the average point at t=6 sec (Theorem 1). The eigenvalues of square matrix of Perron illustrated in Figure 8 showed that the value was in the range of the Gershgorin circle (Proof 1) which indicated that the system was marginally stable, and it reached steady state values (Proof 2). Thus, it can be clearly understood that the average consensus among agents was achieved via communication among agents as shown in Eqs. (27) and (28).
Figure 7.
Agent state trajectories in reaching average consensus.
Figure 8.
Eigenvalues of Perron matrix for undirected graph.
xit=∑j∈Niaijxjt−xitE27
αc=1n∑ixi0E28
4.2 Broadcast event-triggered and broadcast time-triggered performances comparison
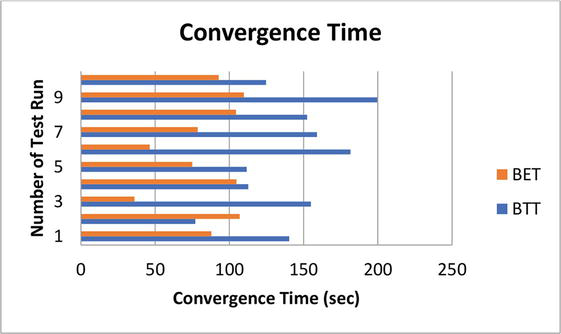
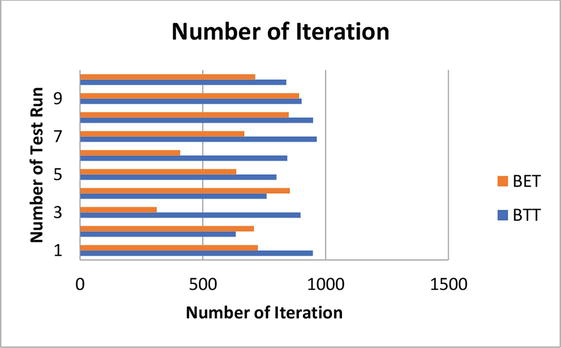
The BET and BTT controllers were proven effective to find consensus to rendezvous target point. The performances of convergence time and iteration, trajectory, the NOC utilization were among the evaluated to compare the effectiveness of both the controllers. Compared with the two different sampling methods that has been integrated into the broadcast communication controller, BET showed faster convergence and less number of iterations than BTT. BET was proven to be able to simplify the convergence process to meet rendezvous, leading 57.15 s with 177 number of iterations against BTT based on average value found in 10 times test run. These readings depended on controller performances with a different sampling system, TT and ET produced inconsistent results in ten times run as illustated in Figures 9 and 10. The stochastic error and deterministic error will determine the next agent’s random movement and next agent’s deterministic movement until rendezvous was achieved.
Figure 9.
Convergence time.
Figure 10.
Number of iteration.
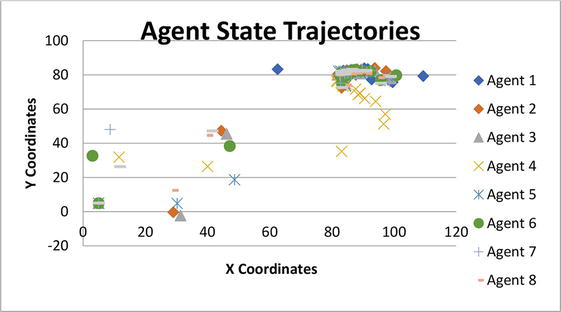
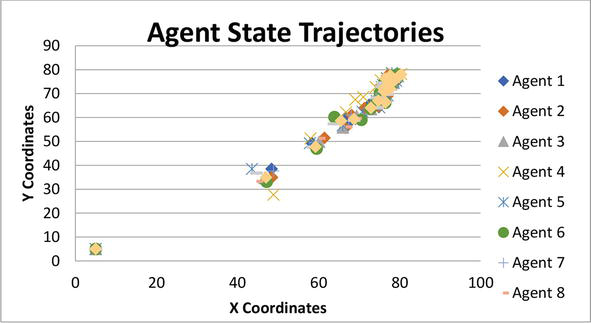
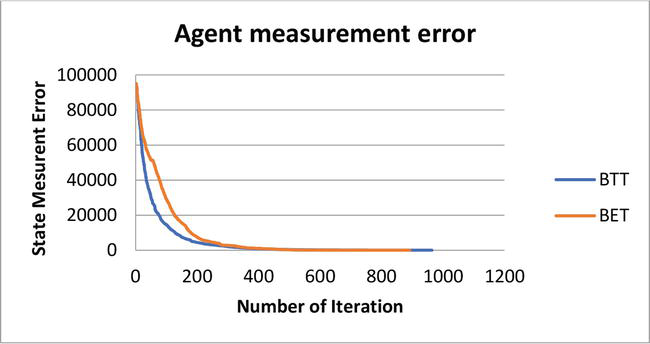
The agent trajectory was observed at every 50 interval of iterations to see the pattern of movement and the measurement error. For BET, it was clearly seen that agent movement was scattered at the first few iterations and gathered towards 60% of the overall process while the BTT move closer and systematically at the beginning until the end of the process as shown in Figures 11 and 12. This showed that the BTT communication gave effect to the agent consensus since the agent continuously communicate with the neighbour at every time whereas the BET communication only gave significant effects when the ETF condition is violated which results to the pattern of measurement error being lesser with BTT as compared to BET as shown in Figure 13. Thus, in terms of movement, the BTT was more accurate compared to the BET.
Figure 11.
Agent state trajectories (BET).
Figure 12.
Agent state trajectories (BTT).
Figure 13.
Agent measurement error (BTT and BET).
The NOCs witin 100 iterations was recorded. For BET, the NOCs can be reduced and save up to 29% utilization as compared to BTT as shown in Table 2. This was because the BET controller will only allow the information exchange between the agent and neighbours to occur when it violated the ETF but for BTT, the information exchange happened at every time-triggered.
Iteration
100
200
300
400
500
600
700
800
NOC (BET)
248
181
177
255
436
500
500
500
NOC (BTT)
500
500
500
500
500
500
500
500
Table 2.
NOCs of BET and BTT.
In overall comparison, the efficiency of BET was more than BTT sine the time taken and number of iterations were lesser. In terms of trajectory, there were better accuracy for TT since it was closer to the target trajectory as compared to ET which was less systematic from the effects of the communication error. Therefore, the implementation of ET into the agent broadcast has an effect towards the overall agent performances in terms of agent time and iteration, utilization of channel as well as agent trajectory as summarized in Table 3. The significant affect was thus proven. It was shown that the second theorem was proven not only in theory but also through the practical experiements.
Type of sampling
Time (sec)
Number of iteration
No channel
Trajectory
Efficiency
ET
84.24
677
70%
Scattered
High
TT
141.4
854
100%
Systematic
Low
Table 3.
Agent performances with BET and BTT in 10 times run.
The threshold value (Eq. (9)) has been varied to observe the effects on agent performance in terms of NOC utilization. The optimal threshold value for this case study was within the range of 10 and 30. The results show that the convergence and NOC gets affected when the value of the threshold is less or more than the optimal range, as shown in Table 4.
Threshold, σi of ET
Rendezvous status
Percentage NOC usage
σi<10
Meet rendezvous with full communication
96.07%
10≤ σi≤30
Meet rendezvous with less communication
93.73%
σi>30
Does not meet rendezvous
86.93%
Table 4.
Communication and rendezvous status with three different σi values.
Based on the BET’s ideal parameters, which were covered in Section 4.1, the gain ak ranged from 0.025 to 0.003 and the ck ranged from 0.662 to 1 for iterations 1–194. The gain, which also has an impact on agent performance in terms of convergence time, iterations, and trajectory movements of the agent to reach rendezvous point, was shown to be impacted by changes in each broadcast parameter coefficient. Table 5 shows the example of SPSA parameter settings applied for a different cases, which are basic investigation of SPSA by James Spall [104], as well as broadcast and broadcast event-triggering for MARS motion coordination applied in this research project.
SPSA variables
By James Spall
Broadcast
Broadcast + ET
a
0.027
0.21
0.2
A1
20
30
30
α1
0.602
0.6
0.6
c
1
1
1
γ1
0.101
0.06
0.06
σ
—
—
30
Table 5.
Optimal settings of SPSA for three different case studies.
The BET consensus controller was proven to work for multi-agent robots to reach rendezvous points in a broadcast communication environment. The agents will only communicate among themselves when they satisfy the event-triggered condition to produce an effective and efficient way of motion coordination to reach the desired rendezvous point. The proposed controller system reached convergence with minimum time and iteration as well as reduced channel utilization, which can claim better performances as compared with a conventional BTT system. However, the trajectory pattern was not as systematic as the BTT system. A thorough analysis was conducted to highlight the effect of parameters on agent performances. In the future, the artificial intelligent controller and advanced controller can be embedded with event-triggered systems to produce a more robust and optimal controller for a practical multi-agent motion coordination application. Besides that, it is recommended to apply it to large numbers of agents, such as swarm robots, and to different types of graph topologies for various MARS applications. This controller can be further explored and expanded for many more multi-agent motion coordination systems, such as static or dynamic communication environments.
1.Dorri A, Kanhere SS, Jurdak R. Multi-agent systems: a survey. IEEE Access. 2018;6:28573-28593. DOI: 10.1109/ACCESS.2018.2831228
2.Doriya R, Mishra S, Gupta S. A brief survey and analysis of multi-robot communication and coordination. In: International Conference on Computing, Communication & Automation, India; 15-16 May 2015. pp. 1014-1021. DOI: 10.1109/CCAA.2015.7148524
3.Yan Z, Jouandeau N, Cherif AA. A survey and analysis of multi robot coordination. International Journal of Advanced Robotics Systems. 2013;10(399):1-18
4.Cao YU, Fukunagu AS, Kahng AB. Cooperative mobile robotics: antecedents and directions. Journal of Autonomous Robots. 1997;4:1-23
5.Sariff N, Xing BTS. A wheeled mobile robot obstacles avoidance for navigation control in a static and dynamic environments. Journal of Physics: Conference Series. 2023;2523:1-10. DOI: 10.1088/1742-6596/2523/1/012028
6.Sariff N, Elyana N. Mobile robot obstacles avoidance by using braitenberg approach. In: 2nd International Conference on Emerging Trends in Scientific Research (ICETSR); November 2014; Kuala Lumpur, Malaysia pp. 1-6
7.Sariff N, Raihan U. Line following mobile robot by using a fuzzy logic technique. In: 2nd International Conference on Emerging Trends in Scientific Research (ICETSR); Kuala Lumpur, Malaysia. 2014, pp. 1-6
8.Mertz L. Tiny conveyance: micro- and nanorobots prepare to advance medicine. IEEE Pulse. 2018;9(1):19-23. DOI: 10.1109/MPUL.2017.2772118
9.Baek I, Jeon G, Yu C, Kim S. Hybrid control of magnetic micro-robot using three-axis Helm-holtz coil. In: 2018 IEEE International Magnetics Conference (INTERMAG), Singapore; 23-27 April 2018. pp. 1-10. DOI: 10.1109/INTMAG.2018.8508120
10.Archila JF, Becker M. Study of robots to pipelines, mathematical models and simulation. In: 2013 Latin American Robotics Symposium and Competition; 21-27 October 2013. pp. 18-23. DOI: 10.1109/LARS.2013.51
11.Zhong H, Ling Z, Miao C, Guo W, Tang P. A new robot-based system for in-pipe ultrasonic inspection of pressure pipelines. In: 2017 Far East NDT New Technology & Application Forum (FENDT); 22-24 June 2017. pp. 246-250. DOI: 10.1109/FENDT.2017.8584579
12.Bramante L, Deffacis M, Bussi D, Barrera M, Picco C, Franceschetti P. The mars terrain simulator: A high level measurement facility in support to the ExoMars mission. In: 2019 IEEE 5th International Workshop on Metrology for AeroSpace (MetroAeroSpace); 19-21 June 2019. pp. 303-308. DOI: 10.1109/MetroAeroSpace.2019.8869653
13.Martinez G. Improving the robustness of a direct visual odometry algorithm for planetary rovers. In: 2018 15th International Conference on Electrical Engineering, Computing Science and Automatic Control (CCE), Mexico City, Mexico; 5-7 September 2018. pp. 1-6. DOI: 10.1109/ ICEEE.2018.8534000
14.Kenny Chour J-PR, Dotterweich J, Childers M, Humann J, Rathinam S, Darbha S. An agent-based modeling framework for the multi-UAV rendezvous recharging problem. Robotics and Autonomous Systems. 2023;166:0921-8890. DOI: 10.1016/j.robot.2023.104442
15.Sabitri Poudel SM. Priority-aware task assignment and path planning for efficient and load-balanced multi-UAV operation. Vehicular Communications. 2023;42:2214-2096. DOI: 10.1016/j.vehcom.2023.100633
16.Wei Y, Bai Z, Zhu Y. An energy efficient cooperation design for multi-UAVs enabled wireless powered communication networks. In: 2019 IEEE 90th Vehicular Technology Conference (VTC2019-Fall), Honolulu, HI, USA; 22-25 September 2019. pp. 1-5. DOI: 10.1109/VTCFall.2019.8890984
17.Muslimov TZ, Munasypov RA. Consensus-based cooperative circular formation control strategy for multi-UAV system. In: 2019 International Russian Automation Conference (RusAutoCon), Sochi, Russia; 8-14 September 2019. pp. 1-8. DOI: 10.1109/RUSAUTCON.2019.8867733
18.Ali ZA, Zhangang H, Hang WB. Cooperative path planning of multiple UAVs by using max–min ant colony optimization along with cauchy mutant operator[J]. Fluctuation and Noise Letters. 2020;20(1):2150002-2152391. DOI: 10.1142/S0219477521500024
19.Maria Mannone VS, Chella A. Modeling and designing a robotic swarm: a quantum computing approach. Swarm and Evolutionary Computation. 2023;79:2210-6502. DOI: 10.1016/j.swevo.2023.101297
20.Wenyu Cai ZL, Zhang M, Wang C. Cooperative artificial intelligence for underwater robotic swarm. Robotics and Autonomous Systems. 2023;164:0921-8890. DOI: 10.1016/j.robot.2023.104410
21.Ismail ZH, Sariff N. A survey and analysis of cooperative multi-agent robot systems: challenges and directions. In: Mobile Robots. Vol. 1. London, UK: Intech Open Access; 2018, pp. 1-22
22.Gulzar MM, Rizvi STH, Javed MY, Munir U, Asif H. Multi-agent cooperative control consensus: a comparative review. Electronics. 2018;7(2):1-20
23.Oh K-K, Park M-C, Ahn H-S. A survey of multi-agent formation control. Automatica. 2015;53:424-440. DOI: 10.1016/j.automatica.2014.10.022
24.Balch T, Arkin RC. Behavior-based formation control for multirobot teams. IEEE Transactions on Robotics and Automation. 1998;14(6):926-939. DOI: 10.1109/70.736776
25.Das K, Ghose D. Broadcast control mechanism for positional consensus in multiagent systems. IEEE Transactions on Control Systems Technology. 2015;23(5):1807-1826. DOI: 10.1109/TCST.2015.2388732
26.Gholamreza Khodamipour SK, Farshad M. Adaptive formation control of leader–follower mobile robots using reinforcement learning and the Fourier series expansion. ISA Transactions. 2023;138:63-73. DOI: 10.1016/j.isatra.2023.03.009
27.Wang Y, Cheng Z, Xiao M. UAVs’ formation keeping control based on multi–agent system consensus. IEEE Access. 2020;8:49000-49012. DOI: 10.1109/ACCESS.2020.2979996
28.Wang C, Liu C, Liu F. Fixed-time consensus tracking of heterogeneous multi-agent systems. In: 2019 Chinese Automation Congress (CAC); 22-24 November 2019. pp. 984-989. DOI: 10.1109/CAC48633.2019.8997210
29.Peng X, Geng Z. Distributed rendezvous and consensus control of multiple unicycle-type vehicles under directed graphs. In: 2019 IEEE International Conference on Industrial Technology (ICIT), Melbourne, VIC, Australia; 13-15 February 2019. pp. 1436-1441. DOI: 10.1109/ICIT.2019.8755110
30.Hanzhen Xiao CLPC, Lai G, Dengxiu Y, Zhang Y. Integrated nonholonomic multi-robot consensus tracking formation using neural-network-optimized distributed model predictive control strategy. Neurocomputing. 2022;138:282-293. DOI: 10.1016/j.neucom.2022.11.007
31.Ma Z, Chen H, Shi L, Shao J. Analysis of containment control for multi-agent systems based on broadcast gossip algorithm. In: 2019 Chinese Automation Congress (CAC); 22-24 November 2019. pp. 5153-5157. DOI: 10.1109/CAC48633.2019.8996305
32.Haghshenas H, Badamchizadeh MA, Baradarannia M. Containment control of heterogeneneous linear multi agent systems. Automatica. 2015;54:210-216
33.Younan Zhao FZ, Xu D. Self-triggered bipartite formation-containment control for heterogeneous multi-agent systems with disturbances. Neurocomputing. 2023;548:0925-2312. DOI: 10.1016/j.neucom.2023.126382
34.Ilyas M, Ali ME, Rehman N. Design, development & evaluation of a prototype tracked mobile robot for difficult terrain. Sir Syed Research Journal of Engineering & Technology. 2013;3(1):7. DOI: 10.1142/S0219477521500024
35.Mu B, Zhang K, Xiao F, Shi Y. Event-based rendezvous control for a group of robots with asynchronous periodic detection and communication time delays. IEEE Transactions on Cybernetics. 2019;49(7):2642-2651. DOI: 10.1109/TCYB.2018.2831684
36.Zhang Y, Fan Y, Song C, Dong C, Wang L. Multi-agent rendezvous control based on event-triggered mechanism. In: 2017 32nd Youth Academic Annual Conference of Chinese Association of Automation (YAC), Hefei, China; 19-21 May 2017. pp. 780-784. DOI: 10.1109/YAC.2017.7967515
37.Xavier Défago AH, Tixeuil S, Wada K. Using model checking to formally verify rendezvous algorithms for robots with lights in Euclidean space. Robotics and Autonomous Systems. 2023;163:0921-8890. DOI: 10.1016/j.robot.2023.104378
38.Qin J, Ma Q, Shi Y, Wang L. Recent advances in consensus of multi-agent systems: a brief survey. IEEE Transactions on Industrial Electronics. 2017;64(6):4972-4983. DOI: 10.1109/TIE.2016.2636810
39.Olfati-Saber R, Fax JA, Murray RM. Consensus and cooperation in networked multi-agent systems. Proceedings of the IEEE. 2007;95(1):215-233. DOI: 10.1109/JPROC.2006.887293
40.Toyota R, Namerikawa T. Event-triggered formation control of a generalized multi-agent system. In: 2018 57th Annual Conference of the Society of Instrument and Control Engineers of Japan (SICE), Nara, Japan; 11-14 September 2018. pp. 940-945. DOI: 10.23919/SICE.2018.8492671
41.Nambo K, Katsura S. Event-triggered formation control of leader-follower multi-agent system for reducing the number of information transmission. In: IECON 2017 - 43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China. 2017. pp. 7269-7274. DOI: 10.1109/IECON.2017.8217273
42.Xing M, Deng F, Hu Z. Sampled-data consensus for multiagent systems with time delays and packet losses. IEEE Transactions on Systems, Man, and Cybernetics: Systems. 2020;50(1):203-210. DOI: 10.1109/TSMC.2018.2815616
43.Zhang Y, Mu C, Zhao Q, Wang K. Nearly optimal consensus control of discrete time multiagent systems with time delays. In: 2019 IEEE Symposium Series on Computational Intelligence (SSCI); 6-9 December 2019. pp. 72-77. DOI: 10.1109/SSCI44817.2019.9003144
44.Zhou D, Zhang A, Yang P, Yang M. Finite-time consensus of second-order multi-agent systems with time-delay and connectivity preservation. In: 2019 IEEE International Conference on Systems, Man and Cybernetics (SMC), Bari, Italy; 6-9 October 2019. pp. 1782-1787. DOI: 10.1109/SMC.2019.8913935
45.Zhang Y, Sun J, Liang H, Li H. Event-triggered adaptive tracking control for multiagent systems with unknown disturbances. IEEE Transactions on Cybernetics. 2020;50(3):890-901. DOI: 10.1109/TCYB.2018.2869084
46.Nair RR, Behera L, Kumar S. Event-triggered finite-time integral sliding mode controller for consensus-based formation of multirobot systems with disturbances. IEEE Transactions on Control Systems Technology. 2019;27(1):39-47. DOI: 10.1109/TCST.2017.2757448
47.Teixeira PV, Dimarogonas DV, Johansson KH, Sousa J. Event-based motion coordination of multiple underwater vehicles under disturbances. In: OCEANS'10 IEEE SYDNEY; 24-27 May 2010. pp. 1-6. DOI: 10.1109/OCEANSSYD.2010.5603980
48.Liu CH, Chen Z, Tang J, Xu J, Piao C. Energy-efficient UAV control for effective and fair communication coverage: A deep reinforcement learning approach. IEEE Journal on Selected Areas in Communications. 2018;36(9):2059-2070. DOI: 10.1109/JSAC.2018.2864373
49.Xie D, Xu S, Zhang B, Li Y, Chu Y. Consensus for multi agent systems with distributed adaptive control and an event-triggered communication strategy. IET Control Theory & Applications. 2016;10:1547-1555
50.Nowzari C, Cortés J. Zeno-free, distributed event-triggered communication and control for multi-agent average consensus. In: 2014 American Control Conference, Portland, OR, USA; 4-6 June 2014. pp. 2148-2153. DOI: 10.1109/ACC.2014.6859495
51.Guinaldo M, Farias G, Dormido-Canto S, Chaos D, Sánchez J, Dormido SA. A mobile robots experimental environment with event-based wireless communication. Sensors. 2013;13(7):9396-9413
52.Licea DB, Bonilla M, Ghogho M, Lasaulce S, Varma VS. Communication-aware energy efficient trajectory planning with limited channel knowledge. IEEE Transactions on Robotics. 2020;36(2):431-442. DOI: 10.1109/TRO.2019.2948801
53.Tallamraju R, Verma P, Sripada V, Agrawal S, Karlapalem K. Energy conscious over-actuated multi-agent payload transport robot: Simulations and preliminary physical validation. In: 2019 28th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), New Delhi, India; 14-18 October 2019. pp. 1-7. DOI: 10.1109/RO-MAN46459.2019.8956442
54.Cabreira TM, Kappel K, Brisolara LBD, Ferreira PR. An energy-aware real-time search approach for cooperative patrolling missions with multi-UAVs. In: 2018 Latin American Robotic Symposium, 2018 Brazilian Symposium on Robotics (SBR) and 2018 Workshop on Robotics in Education (WRE); 6-10 November 2018. pp. 254-259. DOI: 10.1109/LARS/SBR/WRE.2018.00054
55.Oosterhuis B. The impact of event-triggered control on the energy consumption of a legged robot [master of Sciences. Delft Center for Systems and Control (DCSC), Electrical Engineering, Mathematics and Computer Science, Delft University of Technology; 2016
56.Wu Y, Zhang B, Yang S, Yi X, Yang X. Energy-efficient joint communication-motion planning for relay-assisted wireless robot surveillance. In: IEEE INFOCOM 2017 - IEEE Conference on Computer Communications, Atlanta, GA, USA; 1-4 May 2017. pp. 1-9. DOI: 10.1109/INFOCOM.2017.8057072
57.Socas R, Dormido S, Dormido R, Fabregas E. Event-based control strategy for mobile robots in wireless environments (in eng). Sensors (Basel). 2015;15(12):30076-30092. DOI: 10.3390/s151229796
58.Seyboth GS, Dimarogonas DV, Johansson KH. Event-based broadcasting for multi-agent average consensus. Automatica. 2013;49(1):245-252. DOI: 10.1016/j.automatica.2012.08.042
59.Fan Y, Wang S, Qiu J. Event-based control for average consensus of multi-agent systems. In: 2014 International Conference on Mechatronics and Control (ICMC), Jinzhou, China; 3-5 July 2014. pp. 832-836. DOI: 10.1109/ICMC.2014.7231670
60.Yang Z, Xu W, Shikh-Bahaei M. Energy efficient UAV communication with energy harvesting. IEEE Transactions on Vehicular Technology. 2020;69(2):1913-1927. DOI: 10.1109/TVT.2019.2961993
61.Zebrowski P, Litus Y, Vaughan RT. Energy efficient robot rendezvous. In: Fourth Canadian Conference on Computer and Robot Vision (CRV '07), Montreal, QC, Canada; 28-30 May 2007. pp. 139-148. DOI: 10.1109/CRV.2007.27
62.Cheng LW, Hii MLHAQ, Murali R, Sooriamoorthy D. Purpose-driven design of a burger assembly machine with a 3 degrees of freedom robot arm. Advanced Robotics and Unmanned Systems. 2022;1(2):1-6
63.Li Y, Yang G, Tong S. Fuzzy adaptive distributed event-triggered consensus control of uncertain nonlinear multiagent systems. IEEE Transactions on Systems, Man, and Cybernetics: Systems. 2019;49(9):1777-1786. DOI: 10.1109/TSMC.2018.2812216
64.Liang H, Guo X, Pan Y, Huang T. Event-triggered fuzzy bipartite tracking control for network systems based on distributed reduced-order observers. IEEE Transactions on Fuzzy Systems. 2020;29(6):1601-1614. DOI: 10.1109/ TFUZZ.2020.2982618
65.Adam YM, Sariff N, Al-Geelani NA. E-puck mobile robot obstacles avoidance using fuzzy logic controller. In: 2nd International Conference on Smart Computing and Electronic Enterprise (ICSCEE 2021), Al-Madinah International University; Kuala Lumpur, Malaysia, 2021. pp. 1-6
66.Sariff N, Nadihah NH. Automatic mobile robot obstacles avoidances in a static environment using hybrid approaches (fuzzy logic and artificial neural network). In: 2014 International Conference Artificial Intelligence System Technology (ICAIST); Kota Kinabalu, Sabah; December 2014. pp. 137-142
67.Jeffril MA, Sariff N. The integration of fuzzy logic and artificial neural network method for mobile robot obstacles avoidance in a static environment. In: 2013 IEEE 3rd International Conferences on System Engineering and Technology (ICSET); Shah Alam, Malaysia; August 2013. pp. 326-330
68.Hajar Ashikin S, Akmal Jeffril M, Sariff N. Mobile robot obstacles avoidances by using fuzzy logic techniques. In: 2013 IEEE 3rd International Conferences on System Engineering and Technology (ICSET); Shah Alam, Malaysia. 2013. pp. 332-335
69.Mohamad MF, Sariff N, Buniyamin N. Mobile Robot Obstacle Avoidance in Various Type of Static Environments Using Fuzzy Logic Approach. In: 2014 International Conference on Electrical, Electronics and System Engineering (ICEESE2014), Kuala Lumpur, Malaysia; December 2014. pp. 83-89. DOI: 10.1109/ICEESE.2014.7154600
70.Zhao H, Dai X, Zhang Q, Ding J. Robust event-triggered model predictive control for multiple high-speed trains with switching topologies. IEEE Transactions on Vehicular Technology. 2020;69(5):4700-4710. DOI: 10.1109/TVT.2020.2974979
71.Yao D, Li H, Lu R, Shi Y. Distributed sliding-mode tracking control of second-order nonlinear multiagent systems: An event-triggered approach. IEEE Transactions on Cybernetics. 2020;50(9):3892-3902. DOI: 10.1109/TCYB.2019.2963087
72.Chen F, Chen J. Minimum-energy distributed consensus control of multiagent systems: a network approximation approach. IEEE Transactions on Automatic Control. 2020;65(3):1144-1159. DOI: 10.1109/TAC.2019.2917279
73.Shi X, Song S, Wang T, Yan G. Distributed average consensus with event-triggered in multi-agent systems under general directed topology. In: 2017 2nd International Conference on Cybernetics, Robotics and Control (CRC), Chengdu, China; 21-23 July 2017. pp. 116-120. DOI: 10.1109/CRC.2017.25
74.Wang X, Zeng Z, Cong Y. Multi-agent distributed coordination control: Developments and directions via graph viewpoint. Neurocomputing. 2016;199:204-218. DOI: 10.1016/j.neucom.2016.03.021
75.Wu S, Xia Y, Luo Y, Lin M. Event-triggered cooperative formation control for multi-agent system with dynamic role assignment. In: 2019 Chinese Control Conference (CCC), Guangzhou, China; 27-30 July 2019. pp. 6130-6135. DOI: 10.23919/ChiCC.2019.8865189
76.Buniyamin N, Sariff N, Ngah WAJW, Mohamad Z. Robot global path planning overview and a variation of ant colony system algorithm. International Journal of Mathematics and Computers in Simulation (IMACS 2011). 2011;5(1):9-16
77.Sariff N, Buniyamin N. Genetic algorithm versus ant colony optimization algorithm: comparison of performances in robot path planning application. In: 7th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2010); Madeira, Portugal. 2010. pp. 125-132
78.Sariff N, Buniyamin N. Comparative study of genetic algorithm and ant colony optimization algorithm in global static environment of different complexities. In: 2009 IEEE International Symposium on Computational Intelligence in Robotics and Automation (CIRA 2009), Daejeon, Korea. 2009. pp. 132-137
79.Sariff N, Buniyamin N. An overview of autonomous robot path planning algorithms. In: 4th Student Conference on Research and Development (SCORED 2006); Shah Alam, Malaysia. 2006. pp. 184-188
80.Buniyamin N, Sariff N, Wan Ngah WAJ, Mohamad Z. A simple local path planning algorithm for autonomous mobile robots. International Journal of Systems Applications, Engineering & Development (ISAED 2011). 2011;5(2):151-159
81.Sariff N, Buniyamin N. Evaluation of robot path planning algorithms in global static environments: Genetic algorithm VS ant colony optimization algorithm. International Journal of Electrical and Electronic Systems Research (IEESR 2010). 2010;3:1-12
82.Li W, Liu Y, Sun H. A survey of event-based consensus for multi-agent systems. In: 2017 Chinese Automation Congress (CAC); 20-22 October 2017. pp. 6606-6611. DOI: 10.1109/CAC.2017.8243967
83.Peng C, Li F. A survey on recent advances in event-triggered communication and control. Information Sciences. 2018;457-458:113-125. DOI: 10.1016/j.ins.2018.04.055
84.Yu Z, Zhao Y, Zhang W. Study on consensus of the forth-order discrete-time multiagent system in directed networks. IEEE Access. 2020;8:11658-11668. DOI: 10.1109/ACCESS.2020.2965556
85.Meng X, Xie L, Soh YC, Nowzari C, Pappas GJ. Periodic event-triggered average consensus over directed graphs. In: 2015 54th IEEE Conference on Decision and Control (CDC), Osaka, Japan; 15-18 December 2015. pp. 4151-4156. DOI: 10.1109/CDC.2015.7402866
86.Xu Z, Huo J, Wang Y, Yuan J, Shan X, Feng Z. Analyzing two connectivities in UAV-ground mobile ad hoc networks. 2011. DOI: 10.1109/CSAE.2011.5952445
87.Si P, Yu F, Yang R, Zhang Y. Dynamic spectrum management for heterogeneous UAV networks with navigation data assistance. 2015. pp. 1078-1083
88.Xu B, He W. Event-triggered cluster consensus of leader-following linear multi-agent systems. Journal of Artificial Intelligence and Soft Computing Research. 2018;8:293-302. DOI: 10.1515/jaiscr-2018-0019
89.Zuo R, Li Y, Lv M, Liu Z. Distributed asynchronous consensus control of nonlinear multi-agent systems under directed switching topologies. Automatica. 2023;152. DOI: 10.1016/j.automatica.2023.110952
90.Wentuo Fang ZC, Zamani M. Structural consensus in networks with directed topologies and its cryptographic implementation. ISA Transactions. 2023;132:598-606. DOI: 10.1016/j.isatra.2022.11.003
91.Xiaofeng Zong TL, Zhang J-F. Consensus control of second-order stochastic delayed multi-agent systems with intrinsic dynamics and undirected topologies. IFAC-PapersOnLine. 2017;50(1):2421-2426. DOI: 10.1016/j.ifacol.2017.08.438
92.Juan Zhang HZ, Cai Y, Lu Y. Distributed cooperative output regulation of heterogeneous linear multi-agent systems based on event- and self-triggered control with undirected topology. ISA Transactions. 2020;99:191-198. DOI: 10.1016/j.isatra.2019.08.064
93.Yang J, Lee H, Han S. Synchronization by modified broadcast gossip algorithm in multi-agent system. In: 2018 SICE International Symposium on Control Systems (SICE ISCS); 9-11 March 2018. pp. 6-11. DOI: 10.23919/SICEISCS.2018.8330149
94.Das K, Ghose D. Positional consensus in multi-agent systems using a broadcast control mechanism. In: 2009 American Control Conference, St. Louis, MO, USA, 10-12 June 2009. pp. 5731-5736. DOI: 10.1109/ACC.2009.5160384
95.Nor MHM, Ismail ZH, Ahmad MA. Broadcast control of multi-agent systems with instability phenomenon. In: 2016 IEEE International Conference on Underwater System Technology: Theory and Applications (USYS); 13-14 December 2016. pp. 7-12. DOI: 10.1109/USYS.2016.7893945.
96.Azuma SI, Baba I, Sugie T. Broadcast control of markovian multi-agent systems. SICE Journal of Control, Measurement, and System Integration. 2016;9(2):103-112. DOI: 10.9746/jcmsi.9.103
97.Tanaka Y, Azuma S-I, Sugie T. Broadcast control of multi-agent systems with quantized measurements. IEICE Transactions on Fundamentals of Electronics, Communications and Computer Sciences. 2014;E97.A:830-839. DOI: 10.1587/transfun.E97.A.830
98.Azuma S, Yoshimura R, Sugie T. Multi-agent consensus under a communication broadcast mixed environment. International Journal of Control. 2014;87(6):1103-1116
99.Yang Y, Yang Y, Fan Y. Hybrid triggering control for average consensus of multi-agent systems. In: 2016 35th Chinese Control Conference (CCC), Chengdu, China; 27-29 July 2016. pp. 7634-7639. DOI: 10.1109/ChiCC.2016.7554567
100.Noorbakhsh SM Ghaisari J. Distributed event-triggered average consensus protocol for multi-agent systems. In: 2015 23rd Iranian Conference on Electrical Engineering, Tehran, Iran; 10-14 May 2015. pp. 840-845. DOI: 10.1109/IraanCEE.2015.7146329
101.Chen X, Hao F. Event-triggered average consensus control for discrete-time multi-agent systems. IET Control Theory & Applications. 2012;6(16):2493-2498. DOI: 10.1049/iet-cta.2011.0535
102.Liu Z, Chen Z. Event-triggered average-consensus for multi-agent systems. In: Proceedings of the 29th Chinese Control Conference, Beijing, China; 29-31 July 2010. pp. 4506-4511
103.Liu D, Yang G. A dynamic event- triggered control approach to leader-following consensus for linear multiagent systems. IEEE Transactions on Systems, Man, and Cybernetics: Systems. 2020;51(10):1-9. DOI: 10.1109/ TSMC.2019.2960062
104.Cheng Z, Zhang H, Fan M. Consensus and rendezvous predictive control for multi-agent systems with input constraints. In: Proceedings of the 33rd Chinese Control Conference, Nanjing, China; 28-30 July 2014. pp.61438-1443. DOI: 10.1109/ChiCC.2014.6896840
105.Park J, Yoo JH, Kim HJ. Two distributed guidance approaches for rendezvous of multiple agents. In: ICCAS 2010, 27-30 October 2010. pp. 2128-2132. DOI: 10.1109/ICCAS.2010.5670200
106.Li K, Zheng B, Park JH. Event based robust consensus for multi-agent systems via sliding-mode control. In: 2018 Chinese Control and Decision Conference (CCDC) Shenyang, China; 9-11 June 2018. pp. 4483-4488. DOI: 10.1109/CCDC.2018.8407906
107.Ding L, Han Q, Ge X, Zhang X. An Overview of Recent Advances in Event-Triggered Consensus of Multiagent Systems. IEEE Transactions on Cybernetics. 2018;48(4):1110-1123. DOI: 10.1109/TCYB.2017.2771560
108.Nowzari C, Garcia E, Cortés J. Event-triggered communication and control of networked systems for multi-agent consensus. Automatica. 2019;105:1-27. DOI: 10.1016/j.automatica.2019.03.009
109.Amini A, Asif A, Mohammadi AA. A performance guaranteed sampled-data event-triggered consensus approach for liner multi-agent systems. Journal of Information Sciences. 2019;484:338-349
110.Zhu W, Tian Z. Event-based consensus of first-order discrete time multi-agent systems. In: 2016 12th World Congress on Intelligent Control and Automation (WCICA); 12-15 June 2016. pp. 1692-1696. DOI: 10.1109/WCICA.2016.7578796
111.Wang A. Event-based consensus control for single-integrator networks with communication time delays. Neurocomputing. 2016;173:1715-1719. DOI: 10.1016/j.neucom.2015.09.044
112.Heemels WPMH, Johansson KH, Tabuada P. Event-triggered and self-triggered control. In: Baillieul J, Samad T, editors. Encyclopedia of Systems and Control. London: Springer London; 2013. pp. 1-10
113.Sariff N, Ismail ZH. Broadcast and event triggered distributed consensus controller for multi agent motion coordination systems. In: 2019 12th Asian Control Conference (ASCC), Kitakyushu, Japan; 9-12 June 2019. pp. 260-265
114.Sariff N, Ismail ZH. Broadcast event-triggered control scheme for multi-agent rendezvous problem in a mixed communication environment. Applied Sciences. 2021;11(9):1-21. DOI: 10.3390/app11093785
115.Nor MH, Ismail Z, Ahmad MA. Broadcast control of multi-agent systems for assembling at unspecified point with collision avoidance. 2016;8:75-79
116.Azuma S, Tanaka Y, Sugie T. Multi-agent consensus under communication-broadcast mixed environment. In: 2012 IEEE 51st IEEE Conference on Decision and Control (CDC), Maui, HI, USA; 10-13 December 2012. pp. 94-99. DOI: 10.1109/CDC.2012.6426830
117.Socas R, Dormido S, Dormido R. Optimal Threshold Setting for Event-Based Control Strategies. IEEE Access. 2017;5:2880-2893. DOI: 10.1109/ACCESS.2017.2671419
118.Socas R, Dormido S, Dormido R, Fabregas E. Event-Based Control Strategy for Mobile Robots in Wireless Environment. Journal of Sensors. 2017:30076-30092
119.Åström JK, Bernhardsson B. Comparison of periodic and event-based sampling for first-order stochastic systems. IFAC Proceedings Volumes. 1999;32(2):5006-5011
120.Sariff N, Ismail ZH. Simultaneous perturbation stochastic algorithm parameters effect towards multi agent robot broadcast controller. In: 2017 IEEE 7th International Conference on Underwater System Technology: Theory and Applications, Kuala Lumpur, Malaysia. 2017. pp. 1-6. DOI: 10.1109/USYS.2017.8309456
121.Spall JC. Introduction to Stochastic Search and Optimization: Estimation, Simulation, and Control. New Jersey: John Wiley & Sons;, 2003. pp. 1-583
Written By
Nohaidda Sariff, Zool Hilmi Ismail, Ahmad Shah Hizam Md Yasir, Denesh Sooriamoorthy and Puteri Nor Aznie Fahsyar Syed Mahadzir
Submitted: 21 July 2023Reviewed: 21 July 2023Published: 12 October 2023
 Open access peer-reviewed chapter
Open access peer-reviewed chapter