 Open access peer-reviewed chapter
Open access peer-reviewed chapter
Abstract
Unmanned aerial vehicles, previously used for military purposes, have started to be used for civilian purposes since the 2000s. With the widespread use of unmanned aerial vehicles, mostly used for defense purposes, they have turned into flying vehicles called drones. Today, it is used for different purposes such as taking pictures, taking images from inaccessible places, competitions, and having a good time. However, it continues to evolve, playing an important role in social media and inter-company competition. In recent years, studies have continued on small drones that can fly autonomously, especially in closed areas, and assist people. The shrinkage and cost reduction of electronic components such as microprocessors, sensors, batteries, and wireless communication units shows that drones smaller than 1 kg will soon occur in many areas of our daily life at much more affordable prices. This rapid change, development, and proliferation of drones also raise privacy and security concerns. While obtaining images of people and institutions in supposedly private environments with such technological devices emphasizes individual security, its use in urban areas and airports draws attention to social security. The rapid developments in this area necessitate the necessary regulations and controls to prevent accidents and other problems due to the growth in use and loss of control.
Keywords
- unmanned aerial vehicle
- drones
- drone features
- drone technologies
- drone usage fields
1. Introduction
Although the original translation refers to a flying electromechanical technology used to mean “drone,” the term drone is based on a game using the term “Queen Bee” [1]. The historical development of drones shows that the first vehicle that fits the definition of unmanned aerial vehicles (UAV) was the unmanned hot air balloon used in France in 1783. Since then, drones have continued to be used in intelligence, aerial surveillance, search and rescue, reconnaissance, and offensive missions as part of the military Internet of Things (IoT). Drones are widely used in many areas, such as traffic surveillance, cargo, first aid, agriculture, entertainment, hobby, security, and surveillance, as they provide many customizable solutions that combine practicality and speed.
In any case, the low resolution of open-source images provided by satellites, the expensiveness of high-resolution images, and the dependence of satellite images on weather conditions create significant problems in the supply and evaluation of images. Drones fill an important gap as images taken by drones that can fly several meters above the ground offer advantages such as cloud-based data analysis, allowing manufacturers to monitor product development and quality continuously, easily, and quickly [2].
Such technological equipment also allows real-time monitoring of the business situation in the construction industry, rapid analysis of the excavation area in the mining industry, precise determination of the excavation to be excavated, and preliminary preparations. In the energy and infrastructure sector, it is possible to determine roads, cables, and pipelines and plan accordingly. Aid organizations use drones to locate camps, plan transportation routes, and monitor work. It allows the rapid delivery of goods and services and the arrangement of communication infrastructures to areas with a high density of buildings and people or where there is no highway transportation.
Drones for transportation fulfill important tasks in delivering medical supplies and foodstuffs over long distances in emergencies and rapid rescue efforts. Drones are also used in the logistics industry to detect damage and cracks in the ship structure and hull, allowing emergency teams such as the fire brigade to intervene in dangerous areas quickly and safely. We also see drones in measuring the level of wear and tear on highway routes, security checks in bridges and tunnels and other determinations, and interior controls of partially damaged buildings in disaster. To provide the communication needs of different work groups or rescue teams in the field of activity, drones can be used in communication as well as helping to establish private communication networks quickly. Although the battery life problem, the biggest obstacle in using drones, is still a problem in long-distance tasks, it is possible to perform longer functions by changing the battery in short-distance studies. Another important limitation of unmanned aerial vehicles used today is the need for human supervision to perform almost all of the tasks described, which are factors that slow down the performance of the specified functions and the intervention in case of danger.
Many factors are considered depending on the size and flight characteristics of drones. Among these, the increase in energy cost due to the reduction in size and the difficulty of hanging in the air can be counted. On the other hand, there is no ideal design for fixed and rotary wing drones that combines both aerodynamic and propulsion performance. These include traditional fixed-wing and rotary-wing designs and bio-inspired designs based on flapping wings. Of course, each of these designs has advantages and disadvantages. For example, fixed-wing aircraft can fly quickly and efficiently but cannot hover. Rotary-wing designs can hover and are highly maneuverable but have lower flight efficiency. On the other hand, there is no ideal design for both fixed and rotary-wing types that provides both aerodynamic and thrust performance [2].
The growth in the use of commercial and personal drones has necessitated many regulations to prevent accidents and provide drone control in a way that does not pose a hazard [3]. Although many countries have created UAV regulations, the increasing use of drones causes rules to change constantly and new rules to be introduced. These regulations vary between countries and regions. Among these regulations, in the UK, the Civil Aviation Authority (CAA) limits the flight altitude of unmanned aerial vehicles to 500 feet, drones weighing more than half a kilo. It is important to register it with the CAA. The agency also states that it is prohibited to fly near airports and an aircraft with its “Dronecode” that it is mandatory to stay below 400 feet and at least 150 feet away from buildings and people, and that the drone must be constantly observed during flight [1].
2. Features of drones
Drones, designed with a kite-like mechanical architecture and one engine placed on its diagonal points, mainly consist of four basic components: propeller, engine, body, and flight board. Drones, generally defined as 250 and 450 class according to the distance between the two crossed motors, are classified as single rotor (helicopter), multi-rotor (multicopter), fixed wing, and fixed-wing hybrid VTOL according to their physical structures.
Single-rotor drones are small-sized helicopters and fueled or electric types are available. Working with a single blade and fuel offers advantages such as increasing stability and flying longer distances, but it also brings safety risks.
Multicopter are the smallest, lightest, and most widely used drones on the market. Their flight distance, speed, altitude, and payload are limited. These drones, which usually carry a light load such as a camera, are used for terrestrial observations and determinations of up to 50 minutes of flight time.
Multicopters are divided into models with four engines (quadcopter), six engines (hexacopter), and eight engines (octocopter) according to the number of motors. The main factor determining the design here is the carrying capacity of the drone and the required range; accordingly, the size and number of engines are determined. According to the necessary range and control structure, there are many types of drones, from hobby-purpose models with a range of 30–40 meters to professional models with a range of 10 km+, together with the engine, chassis, and battery.
Tricopter: It is a type of drone that can take off and land vertically and has six degrees of freedom on the X–Y–Z axes. Its cost is lower than other options. However, it is an important disadvantage that it is not symmetrical (Figure 1).
Quadcopter: It is the most preferred type of drone. It is simple as well as versatile. In this way, it provides ease of use. It has four propellers and four motors, two on the right and left, and can take off with a load of up to 5 kg. A higher flight comfort can be achieved with its four-arm structure being symmetrical. However, since the quadcopter system works as a whole, it has no backup plan or redundancy. Therefore, in case of any malfunction, the drone will most likely crash (Figure 2).
Hexacopter: It is a type of drone with six propellers. It is a type of drone that can offer excellent performance even on indoor flights, thanks to its advanced forward vision system and ultrasonic sensors. It can be equipped with various equipment and take off with a load of up to 10 kg, as in other models. It has the features of using the vehicles in automatic or manual mode with products called desk or vehicle terminal, which enable longer range operation outside the flight control system and hand terminal, such as returning to the starting position when it goes out of the coverage area, when the signal is cut off or when the battery is about to run out (Figure 3).
Octocopter: It is a type of drone with eight propellers. It is an advanced type of drone that can take off with a load of 25 kg with its equipment. It is especially preferred for heavily loaded works (Figure 4).
Fixed-wing drones: Unlike rotary wings, they use wings like a regular airplane instead of vertical lift rotors to provide lift (Figure 5). In other words, they only need to use energy to move forward. They are much more efficient as they do not use additional power to stay in the air, so they can cover longer distances and scan much larger areas. Gasoline-powered ones can remain in the air for 16 hours or more.
The main disadvantage of a fixed-wing aircraft is that they cannot fly in one spot. Depending on their size, they need a runway or launcher to get them into the air. Fixed-wing also makes launching and landing them much more difficult, as a runway, parachute, or net may be needed for a safe landing again after the flight. Only the smallest fixed-wing drones are suitable for manual launch and “belly landing” in an open area. Other negative aspects are the high cost and difficulty of using fixed-wing drones. Training and certification are needed to develop control capabilities to enable takeoff, flight, and soft landing when a fixed-wing drone is launched. The difference to be considered by the drone pilot is that a fixed-wing drone always moves much faster than a forward, multi-rotor drone.
Fixed-wing hybrid VTOL drone: Fixed-wing hybrid VTOL drones are a new hybrid category that can also take off and land vertically, combining the advantages of fixed-wing UAVs and the ability to hover. These drones are a mix of fixed-wing drones with rotors attached to the blades and rotor-based drones (Figure 6). There are fixed-wing designs with no movement feature of vertical lift engines, models with motors that provide forward motion, and various types with propellers that can move up and down for takeoff and horizontally for forward flight. Fixed-wing hybrid VTOL unmanned aerial vehicles, thanks to its hybrid approach, this technology offers users the durability of a fixed-wing design and the vertical flight capabilities of a rotor-focused design. With the introduction of modern autopilots, gyroscopes, and accelerometers in this field, it has become easier to operate these drones.

Figure 1.
Tricopter.

Figure 2.
Quadcopter.

Figure 3.
Hexacopter.

Figure 4.
Octocopter.

Figure 5.
Fixed-wing drone.

Figure 6.
Fixed-wing VTOL drone.
Fixed-wing hybrid VTOL unmanned aerial vehicles have the advantages of flying vertically and hovering, offering greater versatility than fixed-wing drones and the durability needed to travel long distances with heavy payloads. On the other hand, they could be better in both forward flying and hovering features, and the need for specialized personnel in the flight and control of these types of drones is an important consideration.
Drones, divided into four main groups according to wing type, are used in aerial mapping, inspection, surveillance, agriculture, and search-and-rescue areas. Drones can be classified according to size, from very small to large drones [3].
Drones size, very small drones, length of 150 mm, weight of 200 g; small drones, length of 151–300 mm, weight of 200–1000 g; medium-sized drones, length of 300–1200 mm, weight of 1–20 kg; large drones length of 120 cm, weight is classified as 20 kg. The payload a drone can carry will depend on the engine’s power and the lift generated by the propeller in standard weather conditions.
According to the payload they can carry, drones are featherweight, with a weight of less than 11 g and a load of 4–100 g. drones, light drones with a weight of 200–1000 g, a payload of 150–270 g, medium-weight drones with a weight of 1–600 kg, a load of 400–1460 g Drones, and heavy-lift aircraft with a weight of more than 160 kg and a payload of more than 1000 kg are divided into four classes. Featherweight drones are mostly used for military surveillance, light and middleweight drones are used in recreation and photography, and heavy-lift aircraft are used in the cargo transport and cinema sector.
Drones by range, very close range drones, 5 km range and 1-h flight time; close range drones, 50 km range, 6-h flight time; short-range drones, 150 km range, 12-h flight time; medium range drones, 644 km range, 24-h flight time and long-range drones are divided into more than 644 km range and more than 24-h flight time. The drones in this grouping are mostly used in military surveillance, aerial photography, and mapping works.
For a drone to fly, it must have a power source such as batteries or fuel. Their power sources classify drones as battery-powered, gasoline-powered, hydrogen fuel cell, and solar drones. Despite the advantages of battery-operated drones, such as lightweight, sufficient energy storage, and high discharge rates, they have disadvantages, such as short lifespan, rapid energy consumption, and burn risks. Gasoline drones have important advantages such as not needing expensive spare batteries and charging stations, no need to wait for the storms to recharge, high flight speeds, carrying heavy loads, and long flight times. On the other hand, it has undesirable features such as large size, noisy operation, and combustion and explosion due to fuel. Although hydrogen fuel cell drones have positive features such as using renewable and environmentally friendly energy, higher energy efficiency than batteries, long flight time, and short refueling, they have disadvantages such as excessive heat generation and low operating efficiency. Solar drones, on the other hand, have low operating costs and are lightweight but have limited flight time.
According to the motor type, drone types are divided into brushed and brushless. Brushed motors are the type of motor used in recreational drones. Although these engines are inexpensive, they require much maintenance. The larger the dimensions of these engines, the greater their power. Most motors are not in direct contact with the propeller. Brushless motors, being in connection with the rotor, reduce the need for maintenance and increase operating efficiency. It has much higher power than brushless motors. However, since this type of drone motor predominantly works with alternating current, each motor must have an electronic speed controller (ESC) that adjusts its rotation speed [3].
3. Main structural elements of drones
3.1 Frame
The drone body is the main skeleton system where all drone parts are placed (Figure 7). The drone body can be compared to the chassis in computers. The propellers, motors, battery, camera, and receivers fit into the fuselage and are ready to do their job. It has an “X” style design with four arms extending from the middle body. All other parts are in the body, especially the rotors, battery, cards, and camera. If we compare it with the human anatomy, the body forms the skeleton of the drone. F330, F450, and F550 models are the most preferred drone bodies. The most important criteria in choosing these bodies are the ease of spare parts supply, suitability of the price/quality ratio, and the performance it provides. Despite its high price, the QAV250 fiber carbon material is another preferred drone body because the carbon-fiber material reduces the possibility of breakage in case of falling [4].

Figure 7.
Drone frame.
3.2 Propellers
Also called rotor or blade, drone propeller comes in various shapes, sizes, and materials. Regardless of their specific characteristics, all propellers are the basic equipment that does not allow the drone to take off (Figure 8). The propeller is one of the most sensitive parts of the drone and can be easily damaged as it needs to be constantly replaced or installed. These parts, which can be easily dislodged, broken, or corroded during the flight, must be checked. The propellers should be maintained for a good and uninterrupted flight, and continuous preflight checks should be carried out. Propellers are generally made of plastic material, and shaft and propeller diameter are important parameters when changing.

Figure 8.
Propellers.
3.3 Motors
The drone motor is the main dynamo that makes the propellers spin and provides enough thrust for flight. They convert the electrical energy stored in the battery into motion energy and enable the propellers to rotate (Figure 9). Motors, one of the most important parts of the drone, are very important, especially for the drone to work effectively. Removing dust and debris is necessary to prolong motor life and ensure trouble-free operation. If the engine makes an unusual noise, it is time to check the motor. Two types of brushed and brushless motors are used, which vary according to their size, weight, and load. Brushed motors are preferred for lighter and partially entry-level drones, and brushless motors are preferred for heavy and professional drones. While determining the drone motor, size, work, and speed are important parameters.

Figure 9.
Motor.
3.4 Battery
The battery, described as the heart of the drone, is the most important part in terms of power generation and performance (Figure 10). The lithium polymer or lithium-ion battery inside can easily supply propellers’ movement energy. Drone batteries are defined as 1s, 2s, and 3s according to the number of cells in the battery. Each cell corresponds to a voltage of 3.7 volts. In this case, 1-cell lithium polymer batteries are preferred in light hobbyist drones, while 2- or 3-cell batteries are used in drones that require higher voltage. They are not easily damaged, but they can be discharged. For this reason, uninterrupted flights need to have spares for batteries and propellers.

Figure 10.
Power supply.
3.5 Flight control cards
This part, which provides the necessary controls by interpreting the signals from various cards, sensors, and receivers, is the drone’s brain. The flight control card is a circuit board that enables the UAV to move through the sensor information it receives. Sensors are just like a nervous system and are essential for boarding cards. It converts received signals into action for setting speed and direction, activating the camera, and executing other commands. By combining many sensors such as the gyroscope, magnetometer, and accelerometer with GPS, flight control CPUs can use data about the UAV’s status, speed, position, and direction to guide the vehicle’s flight and operation according to parameters. These operations are guided by the settings determined by the user before the flight. Other sensors also enable the autopilot to avoid obstacles and collisions while operating. Autonomous UAVs, on the other hand, can perform all flight plans, including VTOL or runway takeoffs, in-flight maneuvers, and landing, according to defined parameters (Figure 11).
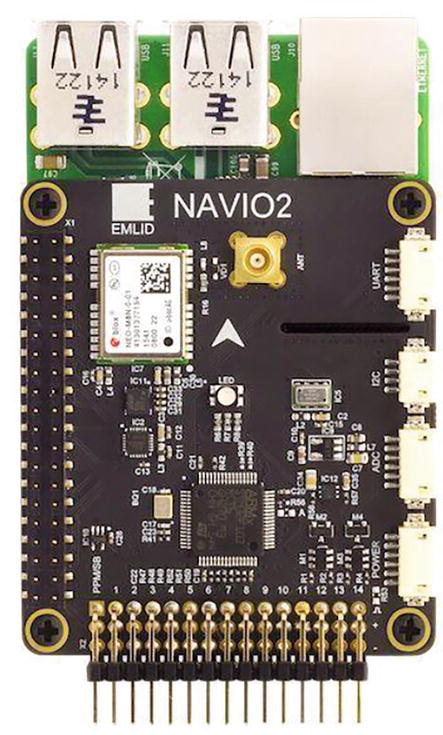
Figure 11.
Flight control board.
3.6 Power distribution board
PDB (Power Distribution Board), mounted on the Drone; the circuit board organizes the power connections of batteries, ESCs, and other onboard systems. It is unnecessary for all drones but helps create a neat and organized drone (Figure 12). In particular, it is responsible for power distribution from the flight battery to each electronic speed controller for the drone control board. In some cases, the PDB is also used to power components such as the camera, LED taillights, and flight controller.
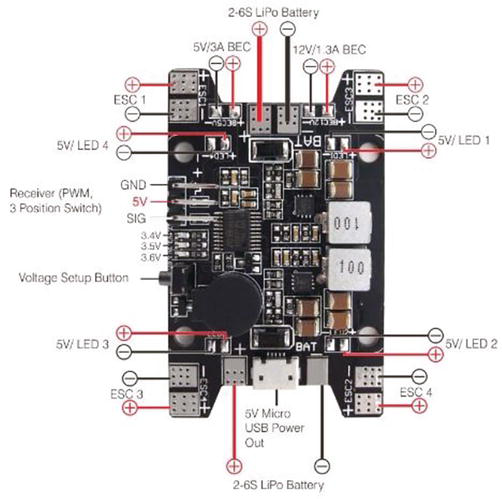
Figure 12.
Multiple power control board used for quadcopter.
3.7 Electronic speed controller
Like the PDB, the Electronic Speed Controller (ESC) is another essential part that only requires a little attention or maintenance. Its task is to control the speed of electronic motors (Figure 13). Each motor has its own ESC connection. In many standard installations, each branch has a separate ESC. However, 4-in-1 ESC parts are also available and provide different advantages. The ESC is the first place to look when a power-related problem occurs, especially local issues with a particular engine.
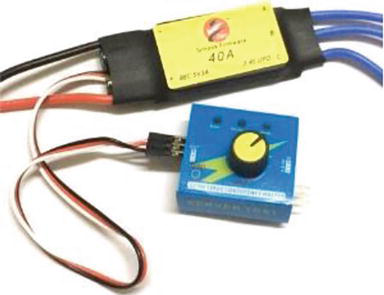
Figure 13.
Electronic speed control and controller.
3.8 Drone controller and receiver
The drone controller is the tool for managing and directing the drone. The most important feature of the remotes is the number of channels. The number of channels should be as much as the type of command given to the drone. While 6-channel controls are mainly used in drones today, this number can increase with accessories such as cameras. A digital display on the controls is another feature that makes it easier to use (Figure 14).

Figure 14.
Six-channel drone receiver.
Receivers are like sensory nerves; they collect information (signals) from external sources (radio transmitters) and transmit them to the brain (flight controller). It is the part that detects the commands from the remote control and enables the drone to move. Receivers using radio waves offer a very fast and uninterrupted transmission. Typically, they use an integrated antenna that allows the reception of radio signals. The receiver will have four channels to control the down, oscillation, acceleration, and yaw. However, many receivers have auxiliary channels to perform certain functions or trigger flight modes. Five or 6-channel receivers are generally the preferred models [4].
3.9 Camera
Not all drones have a camera system, but models offer additional options in-flight, such as aerial photography, cinematic photography, or pilot’s eye view (FPV) flight. As with drones, video systems are available in various models and layouts when considering drone uses and have their parts, such as the gimbal, video transmitter, antenna, and FPV goggles (Figure 15).

Figure 15.
Camera.
One of the most important components in FPV (first-person view) imaging is the FPV camera. The FPV camera is mounted in front of the aircraft, and images from the camera are transmitted to the pilot’s glasses or monitor. There are two types of FPV cameras, analog and HD [5]. In these drones, the image comes first to the lens on the FPV camera; the sensors capture the image and convert it into electrical signals. These converted signals are sent to the video transmitter. When choosing a camera, parameters such as sensor type (CCP/CMOS), sensor size, dynamic range, width ratio, field of view (FOV), delay, and low-light performance are the features to be considered.
There are two sensors used in cameras as CCD and CMOS. CCD sensor collects data using scanning method pixels simultaneously. It has less jelly effect due to the global more shot, high dynamic range performance, good performance in multi-light and low-light (WDR) environments, and better black/white transitions than CMOS. CMOS sensors collect line-by-line data for all pixels on the horizontal and vertical axis. This process can create delays, according to CDD. CMOS sensors may generally experience image distortions with the rolling shutter, that is, the jelly effect, which occurs when the CMOS sensor collects data line-by-line from the pixels. These sensors have good color fidelity and performance, have low power consumption, and are cheaper.
Another factor affecting image quality in cameras is sensor size. Low-light performance and dynamic range depend on sensor size. The larger the sensor size, the greater the field of view as the lens size and low-light performance increase. The dynamic range improves the image in bright and dark environments according to the light intensity and allows the user to see the desired object comfortably. The cameras have two aspect ratios, 16:9 and 4:3. Many cameras today have an adjustable double-width balance. Field of view (FOV) and angle are important user features. The larger the angle, the more difficult it is to view distant objects due to the fisheye appearance. The smaller the field of view, the closer and clearer the image. This event is preferred on immediate flights.
On the other hand, decreasing the lens length or increasing the sensor size increases the field of view. The “lux” unit is an important feature when shooting in low-light environments, and the increase in this value is a feature that improves low-light performance. Sensor size is very important in low light. As the sensor grows, the sensor area increases, causing more light to enter, and lower speed performance occurs.
3.9.1 Sensor features of drone cameras
Drones, cameras, and sensors detect differences, modeling, classification, development, and changes, especially for agricultural applications. Imaging sensors such as red, green, and blue (RGB), and near-infrared, multispectral, hyperspectral, and thermal and distance sensors such as LiDAR and search-and-rescue (SAR) are widely used. RGB sensors capture the image as the human eye sees these red, green, and blue (RGB) colors, a narrow band of the electromagnetic spectrum.
Multispectral image sensor offers the opportunity to easily detect differences in the target area by using sensors sensitive to certain wavelengths along the electromagnetic spectrum. The sensor types and features used for this purpose are divided into green, red, and blue visible bands, red edge, and near-infrared.
Visible light has wavelengths in the range of 400 to 700 nm. It determines regional features, elevation modeling, and object counting applications, especially for agricultural uses.
Red Edge: The 717 nm center is a band corresponding to the 12 nm bandwidth. This tape provides information on phytosterols and chlorophyll. Accordingly, it is used in plant health, plant counting, and water management.
Near-infrared (NIR): 842 nm center is a band corresponding to 57 nm bandwidth. This reflection is used in soil, moisture analysis, crop health, and stress analysis depending on the chlorophyll level in the plant.
Like other spectral imaging, hyperspectral imaging collects information and processes it into the electromagnetic spectrum. Nevertheless, aside from visible light, which the human eye can detect in three bands (red, green, and blue), spectral imaging looks at objects using a wide part of the electromagnetic spectrum. In other words, thanks to this technique, which divides the image into many bands, it offers the opportunity to grasp objects and their properties in a much wider band range than what is visible in the pictures with a single camera. In particular, it is a technology that can be used in the detection of underground resources in mining, agriculture, the prevention of diseases and pests, the military field, thermal infrared hyperspectral imaging, the chemical field, in the detection of colorless and odorless harmful substances in the air, in environmental issues, in the detection of leaking toxic wastes. Despite the advantages of hyperspectral imaging, such as imaging in a wide spectrum, it is very expensive, and complex processing processes pose a significant problem [6].
Thermal imaging is an imaging system based on invisible IR energy (heat) and determines the general structure of the image, colors, and shapes formed according to IR energy. While normal cameras create the image thanks to the light, thermal cameras make the image thanks to the heat. Similarly, color differences are important when the human brain and eye use colors and light to create an image.
Thermal cameras are used to map the amount of water in the soil (SWC) depending on the land surface temperature (LST) [7]. Thermal cameras have limited spatial resolution, which often causes difficulties in homogeneous areas such as farmland with bare soil [8]. It is especially used in agriculture to determine plant water needs, detect disease, and for phenotyping.
4. Drone technologies
4.1 Radar positioning and returning home
Today’s drones can operate in GNSS and nonsatellite modes using a combination of Global Navigational Satellite Systems (GNSS) such as GPS and GLONASS. This precision navigation system brings 3D map creation, navigation, and search-and-rescue (SAR) tasks while flying. Satellites take advantage of GNSS satellites when the drone is first powered up. It uses constellation technology. A satellite constellation is a group of synchronized satellites with overlapping coverage areas. The built-in compass lets the drone and remote control system know exactly the flight location. The compass is calibrated to set a starting point. Thus, the drone’s position will return in case of signal loss between the drone, and the remote control system is determined. This adjustment is also known as the “fail-safe function.” The radar technology in the drone checks some information on the control screen before starting the flight, confirming the suitability of the current conditions for flight. This information includes that communication with good drone GNSS satellites has been established, and the drone is ready-to-fly. It provides information such as determining the current location, returning home using the button for any reason, reaching the set low battery level, and recording the starting point for the “Return to Home” feature in case of loss of communication between the drone and the remote control, and can return to the starting position without any problems [10].
4.2 Obstacle detection and collision avoidance technology
Drones are equipped with collision avoidance systems for safety purposes [9]. These systems consist of sensors that do not scan the environment but detect obstacles. Data from the vision sensor, ultrasonic, infrared, LiDAR, time-of-flight (ToF), and monocular vision sensors transform images into 3D maps, allowing the flight controller to detect and avoid the object. With the help of software algorithms and SLAM technology using this data, 6-way obstacles are detected, and necessary actions are taken to prevent them.
4.3 Drone movement patterns
Roll is the Z-axis on the nose and tail of the aircraft, i.e., longitudinal. It means it rotates around the axis; the wings move up and down (Figure 16).
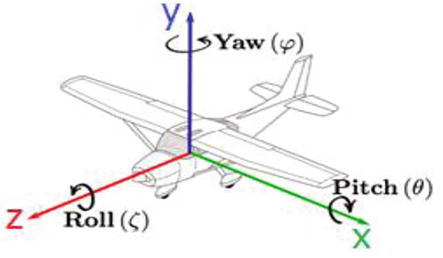
Figure 16.
Drone movements.
Pitch is the X-axis between one wing and the other wing of the aircraft, Lateral. It rotates around the axis; in other words, the nose and tail of the aircraft move up and down is also called the pitching motion.
Yaw is the Y-axis that runs between the upper and lower parts of the fuselage, passing through the aircraft’s center of gravity. It means the rotational movement on the axis. In other words, it is the right-left movement of the nose and wing of the aircraft [8].
4.4 Gyro stabilization, IMU, and flight controllers
The gyroscope immediately responds to varying forces coming into the drone by providing the necessary navigation information to the central flight controller. The inertial measurement unit (IMU) detects the current acceleration rate using the accelerometer and the gyroscope to see changes in rolling characteristics such as pitch, roll, and yaw. The IMU includes a magnetometer to calibrate against drift during flight. The gyroscope and IMU are core components of the drone flight controller, which is the drone’s brain. Gyro stabilization technology is one component that provides the drone with smooth flight capability by using all these components [10].
4.5 Drone engine orientation and propeller design
Motors and propellers are the technology that lifts the drone, allowing it to fly or hover. On a quadcopter, the motors and propellers work in pairs, with two motors/propellers rotating clockwise and two motors/propellers rotating counterclockwise. The drone moves according to the data it receives from the flight controller and electronic speed controllers (ESC) for hover or engine flight direction.
4.6 GPS ready-to-Fly and No-Fly zone drone technology
According to the compass calibration, when the drone starts to work, the drone searches for the position of GPS satellites; when more than six satellites are detected, the drone becomes “ready-to-fly.” To increase flight safety and prevent accidents in restricted areas, the “no-fly zone” feature is activated, and flight is blocked. No-fly zones are divided into two categories, A and B. These regions can be renewed and changed by software updates. Suppose all controls are in the direction of flight. In that case, the flight of the drone is provided, and the existing flight telemetry and the objects or environments that the drone monitors with the camera can be followed over the mobile device or the control device.
4.7 Creating 3D maps and models
The drone visualization’s hyperspectral, multispectral, LiDAR, and thermal sensors are created by 3D digital surface models (DSM) of buildings, earth, and landscape and the land’s digital height maps (DEM). It has become very easy to make evaluations and plans about agricultural products, flowers, fauna, shrubs, and trees.
Time-of-Flight (ToF) is a precision mapping and 3D imaging technology that emits a very short pulse of infrared light and measures the rotation time of each camera sensor pixel. Flash LiDAR time-of-flight cameras offer a variety of solutions by measuring distances within a captured scene. This way, operations such as object scanning, obstacle avoidance, tracking and recognizing objects, and measuring volumes become easier.
Turning images into maps and models is as important as taking high-resolution drone images. For this, Pix4D Mapper, AutoDesk ReCap, 3DF Zephyr, Agisoft Photogrammetry software such as PhotoScan and ESRI Drone2Map for 2D/3D mapping and imaging software such as ArcGIS, PrecisionHawk, and DroneDeploy are among the most widely used tools.
5. Systems supporting the development of drone technology
The use of new technologies with existing systems is an important issue that ensures the development of the system and the increase in performance. With the addition of new generation technologies such as artificial intelligence (AI), the Internet of Things (IoT), big data, blockchain, 3D printing, robotics, gene studies, 5G, nanotechnology, and solar cells, which gained the first remote control feature with the use of radio signals, the usage area of drones expanded [11]. When evaluated in terms of the contributions of the developed technologies to the drones, the body, propeller, and engine parts are modeled with a 3D printer; with artificial intelligence technology, the range is increased with a solar cell, and it can process big data quickly with 5G, and control and coordinate the use of a robot for special purposes with the results it produces. A drone that can fly is notable for most industries. The capabilities and usage areas of drones will develop depending on the technology development. Although drones are seen as the end users of developed technologies, they have the potential to be an important tool in the development of technological innovation, depending on the needs.
6. Drone usage areas
Although the use and development of drones are always for military purposes, the use of drones in both commercial and other sectors is becoming widespread today. The evaluations regarding the usage areas still used in this regard and expected to become more widespread soon are summarized below.
6.1 Agriculture
In agricultural areas, it contributes significantly to providing data to sector stakeholders and increasing producers’ productivity by collecting data with regular land observation. Drones in spraying, fertilization, and plant damage detection applications inspect the planted crops (Figure 17). The use of drones in agricultural production is becoming more common daily, and it provides convenience for producers to optimize production by increasing efficiency and reducing physical load. Drones offer significant time savings in agricultural research, planting seeds, monitoring livestock, and predicting crop yields. Smart farming techniques will become more widespread with drone and satellite data for producers to monitor their products and plan for planting, fertilization, and spraying times.

Figure 17.
Agricultural drone.
6.2 Environment
Depending on the increasing city population, drones are successfully used in environmental control and emergency response processes. To prevent environmental pollution, drones not only carry out projects aimed at cleaning the seas but also make an important contribution to the fight against poaching and the tracking of endangered animals. The behavior and disease conditions of animals can be followed thanks to thermal cameras. In addition, oil companies use drones for inspections of oil and gas leaks. Drones with thermal cameras perform important tasks in detecting leaks quickly and preventing possible risks.
6.3 Health
The use of drones for medical purposes is used to transport response equipment to the scene in urban areas, to direct people to the stage with drones with cameras and audio devices, to transport equipment such as medicine and trauma kits in rural areas, or to facilitate search-and-rescue efforts.
In patients with shockable rhythm in prehospital events, delivering a life-saving defibrillator (AED) by drone is 32% faster in urban centers and 93% faster in rural areas where other vehicles cannot reach [12]. In the same way, it has been demonstrated that it is possible to transport drugs/tissues, and blood products, with drones, with the research conducted with samples taken before and after the flight on the effect of vibration on the transported tissue. These materials can be delivered to difficult areas faster than the traditional methods [13].
6.4 Photography and cinema
Professional video shoots are made today using drones in commercials, TV series, and movie sets, successfully capturing specific images. It is used in the direct marketing of products and in taking aerial images to show a city, beach, or building from a bird’s eye view in advertising shoots. Advertising drones are becoming increasingly common in crowded events and areas with high density. It provides great convenience in collecting images and information from places that cannot be visited or entered, especially due to security problems. The use of drones can make a significant contribution to innovation and quality in the film industry.
6.5 Mapping
Drones, becoming increasingly widespread in mapping, can map almost all terrains quickly and in three dimensions. For this purpose, LiDAR Drones with sensors provide highly successful and accurate data. LiDAR technology offers important solutions in the evaluation of agricultural products as well as the mapping of landforms (Figure 18).
Figure 18.
Mapping with a drone.
6.6 Logistics
Drones are used in the logistics industry to transport food, packages, or goods. It is preferred for transporting urgent or frequently sent small parcels and for delivery to hard-to-reach areas. One of the most important and pending problems in logistics use is that drones need a sufficient carrying capacity. Similar to agriculture, it is also used to scan different warehouse materials. Heavy-duty drones can improve road traffic by replacing existing carriers for material management and transporting goods between warehouses. Soon, drones may be an important player in the delivery options of packages (Figure 19).

Figure 19.
Logistics drone.
6.7 Emergencies
Another area where drones are used is in emergencies. Drones help the fire brigade, police officers, volunteer rescuers, and more. Drones are used for reconnaissance before guiding the rescue team, especially when the extent of the disaster is unknown. Autonomous underwater vehicles (AUVs) prevent possible drownings and assist in rescue in situations such as when a boat capsizes. Drones are also used to search for the injured in avalanche cases.
6.8 Conservation of wildlife and historic buildings
Drones are an economical and effective alternative to monitor wildlife species and protect natural life. Rapid aerial observations are important tools in gaining a better idea of the health of the species and ecosystem, monitoring and researching migration routes by monitoring animal groups, and preventing poaching.
Drones also scan forest floors destroyed by fires, releasing seed containers containing seeds, fertilizers, and nutrients to help trees regenerate. Considering that reforestation of such areas with human labor will take many years, the importance of using drone technology becomes apparent.
On the other hand, drones also play an important role in historic preservation efforts. Drones provide great convenience in creating 3D maps of historical places or structures. The 3D images used to reconstruct lost areas provide clues to experts about culture and architecture [14].
6.9 Military
The first known use of drones was for military purposes. It is used for different purposes ranging from military, espionage, radar system, area detection, and observation to transporting food, weapons, and ammunition. Highly sophisticated drones are used, equipped with tools for thermal imaging, laser rangefinder, and even air strikes. MQ-9 Reaper, one of the drones used for military purposes today, has a length of 36 feet and is equipped with a 1852 km flight system at an altitude of 50,000 feet [14].
7. Barriers to drone technology
Although drones have multiple potential uses, there are certain obstacles to their widespread use. Some of these barriers are summarized below.
7.1 Power source
One of the biggest problems for these vehicles, which have managed to work with increasingly smaller and lighter components, is the power requirement. Due to the limited flight times, developing drones capable of long flights with smaller and more powerful batteries remain the priority to solve this problem. Another important expectation is the development of systems that can analyze the terrain with object detection and recognition software instead of onboard systems that require increased weight and more power.
7.2 Security
The biggest obstacle to drone use is security. All human-operated aircrafts inherently pose a risk of falling. Working on limited battery power, having fast spinning propellers, and the potential to fall from heights greatly threaten living things, structures, and the environment due to the increasing number of drones. In addition to obtaining the necessary permits for flights to be made in residential areas, it is essential to develop technologies to prevent possible accidents by autonomously detecting drone obstacles. The importance of safe use is increasing, especially with using drones in daily life. On the other hand, law enforcement should be put in place to limit drones’ interference with the privacy of others.
Drones are becoming a bigger target for cyberattacks as their use increases. Hackers can intercept the transmitted data to take control of the drone. For this purpose, extra measures should be developed to protect drones and the information they store, such as using protective software or passwords.
8. Future prospects
Drones, which have high technology and raise the level of technology daily, are vehicles made of lightweight composite materials that increase strength and maneuverability. Today, drones are used in a wide variety of fields, such as construction, defense, photography, marketing, delivery, agriculture, rescue, and entertainment, and they will certainly meet with drones in new sectors soon, depending on the need for use.
It seems to be a handicap that fixed-wing drones, capable of long-distance flight, cannot perform vertical takeoff and landing. For this reason, long-distance drones with VTOL technology that can take off vertically, hover, and land will become widespread. Drones with improved navigation technology and enhanced connection sensitivity to the group navigation satellite will further improve their ability to direct to the right target. With advanced obstacle detection technology and sensing sensors such as ultrasonic, vision sensor, infrared, LiDAR, and monocular vision, drones will gain new capabilities in 3D mapping. It seems possible to further improve the manifold of accuracy and speed of real-time data transmission, combined with 5G technology of a GPS that helps to know the real-time location and increases the accuracy. Introducing new services in agriculture, construction, defense, aerial photography, marketing, delivery, rescue, and entertainment will expand the use of drones, thanks to high-definition cameras that record and transmit real-time video of a location while flying at a high altitude. Particularly in small-scale enterprises, delivering parcels by drones to regions with low productivity and short distances will be an important element in reducing operational costs. Using drones to rapidly deliver small packages for logistics, medicines, and food over short distances saves labor. However, it can also be offered as a solution to intensifying road traffic due to increasing urbanization.
Increasing environmental concerns and road traffic also increase the demand for air taxis. The widespread use of drone taxis will shorten travel times and reduce carbon emissions, cost, and traffic congestion. The spread of air ambulances will improve the rapid delivery of medical aid to areas in need and the use of drone ambulances in regions affected by natural disasters and congested areas. Drones equipped with thermal sensors, infrared, night vision cameras, and transmission devices, working as a powerful surveillance system, are one of the important tools in obtaining real-time information about the locations of missing persons, injured, and criminals in difficult and high terrain. In addition, drones facilitate tracking poachers, as they continuously monitor forest life and wildlife protection areas without approaching wild animals.
Drones, which provide a detailed view of large areas, spaces, and a particular subject, also intensify the interest of professionals such as commercial photographers, cartographers, and geologists and provide information about the environment at a low cost. Drones are the important helpers in ensuring the crowd’s safety in demonstrations, marches, and other meetings held in public areas. Drones with high-definition cameras serve successfully in aerial image and video shooting at sports events.
Thermal sensors and gyroscopes, with their high maneuverability, small size, and power, increase the accuracy of regional and national weather forecasts by following the scientists’ weather events in detail. It will be inevitable to use it more widely by developing in taking precautions and early warning works by giving an idea about the trajectory of large-scale weather events such as hurricanes.
Agriculture mechanization is important in developing agricultural practices for human nutrition and a sustainable, healthy food supply. The destruction caused by the increasing weight of the massive machines used for efficient and economical production in large areas is a reality. Drones have the potential to be an option in solving this problem. Particularly in agriculture 4.0, IoT applications, taking data quickly from large areas with unmanned aerial vehicles (UAV) and unmanned ground vehicles (UGV), swarm communicating with each other, mapping the land and field-specific applications of agricultural processes according to the data obtained accordingly, and product yield and quality. It has a sustainable solution potential that will increase.
9. Conclusions
Significant developments in drone technology in recent years have made the procurement cost of drones cheaper, and their use has become widespread for professional and civilian purposes. Although there are many different types of drones, it has become easy to find one that appeals to everyone. Drones are classified by fixed-wing, multi-rotor, or VTOL construction, size, weight, and power source. These features also determine the drone’s range, flight time, and loading capacities. The transported load, cameras, sensors, and sensors can be hardware, parcels, drugs, and physical. In the control of the drone under load, certain frequencies are used for communication between the user controller and the drone. International coordination and standardization of this connection, called frequency spectrum in terms of flight and communication security, will fill a deficiency.
Future developments in drone technology include making drones smaller, lighter, more efficient, and cheaper. As such, drones will increasingly become available to the general public and be used for an ever-increasing scope of applications. Drones are expected to become more autonomous soon, and the ability to move in swarms will increase.
The main factor limiting the use of drones is the power supply, namely the flight time issue associated with the battery draining and needing to be recharged. On the other hand, the framework of the rules and sanctions that drone users must comply with regarding other citizens’ privacy and personal rights while doing their targeted work are among the issues that should be clearly stated. In parallel with the developing technology, it is a fact that some features still considered a problem will be solved soon, and drones will become more visible in our daily lives.
References
- 1.
Lutkevich B. Drone (UAV) [Internet]. 2023. Available from: https://www.techtarget.com/iotagenda/definition/drone - 2.
Floreano D, Wood RJ. Science, technology and the future of small autonomous drones (Review). Nature. 2015; 521 :460-466. DOI: 10.1038 /nature14542 - 3.
JOUAV. Different types of drones and uses (2023 Full Guide). 2022. Available from: https://www .jouav.com/blog/drone-types.html#jouav-scrollspy-anchor-7 - 4.
Michael S. Drone anatomy 101. B&H The Professional’s Source. 2017; 02 :210-211 - 5.
Akgüç B. FPV Camera Selection for RC/FPV planes and Drones. 2023. Available from: https://avdesodrone.com/rc-fpv-ucaklar-ve-dronlar-icin-fpv-kamera-secimi/ - 6.
Petropoulos G, Carlson TN, Wooster MJ, Islam S. A review of Ts /VI remote sensing-based methods for the retrieval of land surface energy fluxes and soil surface moisture. Progress in Physical Geography: Earth and Environment. 2009; 33 (2):224-250. DOI: 10.1177/0309133309338997 - 7.
Maes WH, Huete AR, Steppe K. Optimizing the processing of UAV-based thermal imagery. Remote Sensing. 2017; 9 (5):476. DOI: 10.3390/rs9050476 - 8.
Degondi P, Diez A, Na M. Bulk topological state in a new collectively dynamic model. 2021. Available from: https://www.researchgate.net/publication/348803228_Bulk_topological_ states_in_a_new_collective_dynamics_model /citations - 9.
Wikipedia. Hyperspectral imaging. 2020. In Wikipedia. Available from: https://en.wikipedia.org/wiki/Hiperspektral_g%C3%B6r%C3%BCnt%C3%BCleme - 10.
Corrigan F. Drone gyro stabilization, imu, and flight controllers explained. 2020. Available from: https://www.dronezon.com/learn-about-drones-quadcopters/three-and-six-axis-gyro-stabilized -drones/ - 11.
Dogan F. Drone Technologies. 2022. Available from: https://www.guvenlikyonetimi.com/ dron-teknolojileri/ - 12.
Claesson A, Fredman D, Svensson L, et al. Unmanned aerial vehicles (drones) in out-of-hospital-cardiac-arrest. Scandinavian Journal of Trauma Emergency Medicine. 2016; 24 (1):124. Available from:https://www.ncbi .nlm.nih.gov/pubmed/27729058 - 13.
Scalea J, Restaino S, Scassero M, Blankenship G, Bartlett S, Wereley N. An initial investigation of unmanned aircraft systems (UAS) and real-time organ status measurement for transporting human organs. IEEE Journal of Translational Engineering Health Medicine. 2018; 6 :4000107. DOI: 10.1109/JTEHM.2018.2875704 - 14.
Daley S. Drone technology: What is a drone? 2023. Available from: https://builtin . com/drones