 Open access peer-reviewed chapter
Open access peer-reviewed chapter
Comparison of various drone classes for sizing calculation used by each author.
Abstract
Testbeds form an essential aspect in the construction of a Hybrid – Electric Unmanned Aerial Vehicle (HE – UAV)/Aircraft. Such testbeds have never been developed before even though a model of the HE – UAV was developed. This article explores the feasibility of implementing a prototype of a (HE – UAV) testbed. Several research papers in the domain were thoroughly explored and the results were grouped based on similar research findings. The grouping was done in terms of the sizing result achieved by each author, the UAV class used, the hybrid powertrain specifications of the components, and the testbed equipment used to construct the HE – UAV testbed. The result from this research shows that a HE – UAV testbed can be achieved if stringent measures are done in determining the size of the component for a given drone size and a careful selection of the components from the sizing result for the testbed construction.
Keywords
- unmanned aerial vehicle
- unmanned aerial system
- testbed
- Hybrid – Electric
- aircraft
1. Introduction
A MATLAB – Simulink model of a Hybrid – Electric Unmanned Aerial Vehicle (HE – UAV) was implemented in the previous research to analyze the fuel savings potential of the UAV for specific mission profiles Fouellefack et al. [1]. This research article explores the feasibility of constructing a prototype of a HE – UAV. Similar research studies have already been done by previous authors in the field, which are: sizing the components of the hybrid powertrain of the HE-UAV for specific mission profiles, developing a numerical simulation model through a control strategy to optimize HE-UAV performance and constructing test beds to integrate the components of hybrid powertrain which formed the basis for the build-up of a flying UAV/Aircraft. These are explored in the relevant sections below.
1.1 Component sizing
One Aspect essential in the construction of a HE-UAV is to do component sizing of the hybrid powertrain components of the UAV/Aircraft. By component sizing, the author refers to the specification of the components of the hybrid powertrain used to achieve a mission for a given UAV design. Several research studies have been attempted by previous researchers [2, 3, 4, 5, 6, 7, 8] to determine the size of each propulsive component of a hybrid powertrain as this is essential for the testbed construction, UAV size and range covered by the UAV. These include developing mythologies through various optimization functions to minimize specific design parameters to reduce fuel consumption and increase the UAV range and implementing multiple sizing functions to estimate the specification of each propulsive component to achieve a given UAV mission.
Using a non-dominated sorting genetic algorithm, Xie et al. [2] developed a sizing algorithm to size the Hybrid Electric Propulsion Systems (HEPS) for a small UAV for specific mission profiles. The algorithm developed considers two objectives; fuel consumption and flight during the UAV to estimate its range and fuel consumption which was compared to a prototype aircraft. The hybrid aircraft achieved a range of 6 h compared to 5 h using the prototype aircraft resulting in a fuel economy of 17.6%. A similar study was done by Donateo et al. [3] Donateo et al. [4], where the authors developed a multi-objective optimization problem using a genetic algorithm to size the components of a HE – UAV for specific mission profiles. He developed scalable models to calculate the mass and space of each powertrain component (Propeller, gearbox, engine, battery and electric drive) and an optimization routine was run to maximize the endurance and minimize the fuel consumption of the UAV during its mission profile. The optimization of the mission allowed an improvement in fuel consumption of 7% compared to the existing configuration. Pornet et al. [5] produced a similar performance methodology for sizing hybrid electric aircraft for specific mission profiles. His sizing algorithm was used to size the plane for some design variables, and an objective function was developed to minimize fuel consumption during the aircraft’s mission. A fuel consumption of 16% was achieved compared to the conventional aircraft with a mix of fuel and electrical energy of 82%:18%.
Hiserote et al. [6] developed a sizing algorithm using MATLAB to size the propulsion system component of a HE – UAV. The code was designed such that it takes inputs such as the user-specific mission, i.e. airspeed, altitude, rate of climb, battery discharge and hybrid configuration to optimize the power required by the aircraft and perform various sizing calculations of the propulsion system, such as the ICE, EM mass, propeller mass, clutch mass, and battery mass. The author used a 3 h ISR baseline mission profile and compared the size of the propulsion system with the conventional case (ICE-powered) UAV. The hybrid UAV achieved a lesser fuel saving than the conventional UAV.
Schomann et al. [7] designed a sizing methodology to size the propulsion system of a HE-UAV. He developed surrogate models of the components of the hybrid propulsion system, i.e., the ICE, EM, Battery, Propeller and fuel system, such that it iteratively outputs specific parameters for a given input. A similar work is seen in Rippel [8] from the Air Force Institute of Technology, where he developed a sizing algorithm for the conceptual design of a HE-UAV. The sizing code iteratively outputs specific design parameters, such as the power required for flight, wingspan, wing area and propulsion system mass (ICE, EM, propeller mass and battery) for a given user input, such as the aircraft altitude, cruise condition and rate of climb.
Table 1 provides a comparative summary of the drone class used for the sizing calculations, Table 2 gives a comparative overview of the range, endurance and percentage of fuel improvement compared to the conventional case (ICE powered aircraft/UAV) obtained by different authors from their sizing results, and Table 3 compares the sizing results of the hybrid electric propulsion characteristics of the HE- UAV achieved by various authors.
| Paper | Reference UAV/Aircraft class for sizing | Take-off mass (kg) | Wing span (m) |
|---|---|---|---|
| Xie [2] | ERCO Ercoupe 415 | 603 | 9.1 |
| Donateo [3] | General Atomics Predator RQ | 1020 | 14.8 |
| Pornet [5] | Airbus A320 or Boeing B737 | 78,990 | 36.0 |
| Hiserote [6] | Insitu’s ScanEagle AAI’s Aerosonde | 13.6 | 4.62 |
| Schomann [7] | Institution unmanned research aircraft IMPULLS | 35.49 | 5.23 |
| Rippel [8] | Diamond Aircraft DA 20 | 873 | 10.9 |
| Cessna 172 Skyhawk, | 1114 | 11 | |
| General Atomics Predator | 1190 | 11.5 | |
| Harmon [9] | Aerosonde UAV | 13.6 | 4.65 |
Table 1.
| Mission altitude (m) | Cruising velocity | Range | Endurance (h) | Percentage of fuel improvement |
|---|---|---|---|---|
| 230 m | 157 km/h | 600 km | 6 | 17.6 |
| 4900 m | 41 | 24 | 7 | |
| 35,000 ft | 250 K CAS | 2770 nm | 1.2 | 16 |
| 300 m | 20.5 m/s | 12 | 30.5 | |
| 900 m | 20 | — | 12 | — |
| 4000 | 71 | 547 nm | ||
| 4115 | 60 | 700 nm | ||
| 4500 | 47 | 2000 nm | — | |
| (1524) 5000 ft | 23.2–28.3 | 3 | 38 22 |
Table 2.
Comparison of range, endurance, and fuel improvement from sizing results of each HE-UAV achieved by various authors.
| Paper | ICE | EM | Battery | Propeller |
|---|---|---|---|---|
| Xie [2] | ICE Power (40 kW) | EM Power (30 kW) | Battery Mass (10 kg) | |
| Donateo [3] | Engine Power (64 kW) | EM Power (3KW) | ||
| Pornet [5] | EM Power (5.1 MW) EM Mass (510 kg) | Battery Mass (8900 kg) | ||
| Hiserote [6] Clutch-Start Electric-Start Centerline-Thrust | Engine Power (438.9 W) Engine Mass (0.356 kg) Engine Power (429.9 W) Engine Mass (0.349 kg) Engine Power (406.5 W) Engine Mass (0.330 kg) | Electric Motor Power (155.2 W) Electric Motor Mass (0.047 kg) Electric Motor Power (155.2 W) Electric Motor Mass (0.047 kg) Electric Motor Power (155.2 W) Electric Motor Mass (0.047 kg) | Battery Mass (4.171 kg) Battery Mass (4.173 kg) Battery Mass (4.179 kg) | |
| Schomann [7] | Torque (RC/MP) (1.09/1.51) Engine Mass (0.77 kg) | Torque (EF/MP) 0.43/0.66 Electric Motor Mass (0.61 kg) | Battery Mass (3.89 kg) | Propeller Mass (0.18 kg) |
| Rippl [8] | Engine Mass (62.25 kg) | Electric Motor Mass (35.86 kg) | Battery Mass (84 kg) | |
| Harmon [9] | Engine Power (837 W) Engine Mass (1.13 kg) | Electric Motor Power (114 W) Electric Motor Mass (0.16 kg) | Battery Mass 2.2 kg | Propeller Mass (0.17 kg) |
Table 3.
Sizing comparison result of the hybrid propulsion characteristics of the HE – UAV achieved by various authors.
1.2 Supervisory control and optimization
Another important aspect essential for the construction of the HE – UAV testbed is do a numerical simulation of a modeled UAV to predict UAV performance under varying mission profiles. This is usually done by employing a control strategy through an energy management strategy to optimize the power demand of the powertrain components of the UAV during its flight profile. Previous research has applied these control strategies as energy management strategies to optimize the fuel consumption of a HE – UAV during its mission profile. Examples include the usage of a rule base supervisory controller by Harmon et al. [9], Xie et al. [10], Hung et al. [11], where the authors used this control strategy to optimize the fuel consumption of HE-UAVs. Simulations show that a HE – UAV could achieve a fuel-saving potential of 6.9, 7 and 6.5%, respectively, compared to an Internal combustion Engine (ICE) -powered aircraft when using this control strategy.
Another controlled strategy used by researchers is the Fuzzy Logic Supervisory controlled strategy which is used as an energy management strategy to minimize the fuel consumption of HE-UAVs. Lei et al. [12], Xie et al. [13], and Bai et al. [14] employed a Fuzzy Logic supervisory controller to minimize the energy usage of a HE – UAV during its mission. Through Simulation, the authors showed that a HE – UAV could potentially achieve fuel savings of 5.9, 11, and 22%, respectively, compared to an ICE-powered UAV.
1.3 Hybrid: Electric UAV testbeds
After the sizing and modeled simulation of the UAV/Aircraft a final aspect in the construction of a HE-UAV is to build a testbed that seamlessly integrate the hybrid powertrain components of the HE – UAV. Various researchers has attempted to build such tested from the literature [15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25]. These were developed to validate the results obtained from the sizing of their HE-UAVs, and the results of numerical simulation models developed through a control strategy (energy management strategy) to optimize HE – UAVs performance for given mission profiles. Aksland [15] created a hybrid powertrain tested to perform a validation study of his mathematical simulation models and control algorithm which he developed for a HE – UAV. The testbed consists of an Energy Storage System (BMS, Battery Pack), Genset (Engine Starter/Generator, Hybrid ESC), Braking System (Power Supply, LP Battery Pack, Brake Motor, Brake ESC, Filter Box and Load Bank), Drivetrain System (Hybrid ESC, Propeller Motor) and DCDC system (DCDC ESC, Filter Box, Electronic Load). Subs section of the testbed was constructed for each of the components to validate each of the components. The model predicted a good validation with experimental data from the testbed. Figure 1 shows the testbed constructed by the author.
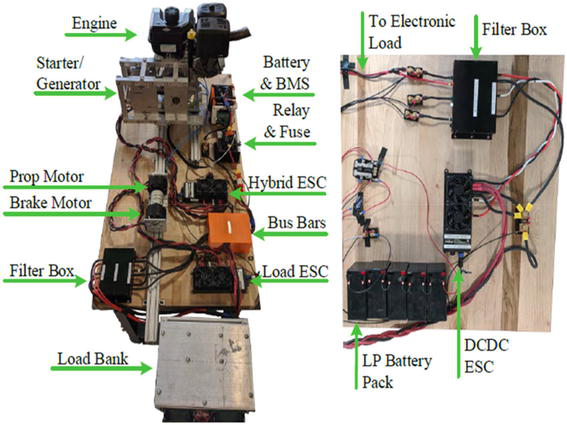
Figure 1.
Detailed labelling of HE – UAV powertrain testbed component [
Another study was done by Savvaris et al. [16], where he constructed a hybrid power testbed to test the control algorithms and mathematical simulation models, he developed for a HEPS for a light aircraft. The testbed consisted of an engine, motor/generator, fuel tank, and auxiliary component. A good performance match was obtained between the simulation models developed and experimental results obtained from the hybrid power tested. Figure 2 shows the constructed hybrid power test bed.

Figure 2.
Completed testbed with the engine, motor/generator, fuel tank and all the auxiliary components installed [
Glassock et al. [17] constructed a prototype aircraft of a hybrid powerplant to show the feasibility of a hybrid powerplant for a small Unmanned Aerial System (UAS). The author began by developing a sizing methodology for selecting the components for building the hybrid power plant. The hybrid power plant was constructed and tested from the sizing results using a small UAS internal combustion engine (10cc methanol two-stroke) and a 600 W brushless direct current (BLDC) motor. Through his experiments, the author showed that a hybrid powerplant could improve the overall mission effectiveness and propulsive efficiency of a small UAS. Figure 3 shows the constructed testbed.

Figure 3.
Detailed labelling of a hybrid power testbed [
Ausserer et al. [18] integrated a hybrid propulsion system on a small remotely piloted aircraft to evaluate its effectiveness for extended flight durations. The author started by constructing a testbed hybrid power plant (consisting of the Honda GX25 IC engine, starter motor, Maxon DC Motor and battery) of the propulsion system by performing a dynamometer test and wind tunnel test. The aircraft was retrofitted with this new propulsion system to evaluate its effectiveness for extended flight duration. A similar study was done by Dehesa et al. [19] where he developed a serial hybrid power test bed to validate his control algorithm on a series – HE – UAV for given mission profiles. The constructed testbed consisted of (a starter motor, generator, a 3 W-28i engine, a motor, battery, battery management system and propeller arranged in a series configuration).
Molesworth [20] developed a hybrid–electric remotely piloted aircraft testbed for validating the hybrid–electric system and control procedures he developed for a small remotely piloted aircraft. The testbed was built using the commercially off-the-shelf components of the ICE, Electric Motor, battery and propeller. The testbed was used to verify the functionality of the RPA hybrid powertrain in ICE Mode, EM Mode, the transition from ICE Mode to EM Mode, EM Mode to ICE Mode and dual Mode. All modes functioned correctly, as predicted from Simulations of the hybrid–electric powertrain and control methodology.
Koster et al. [21] developed a testbed to validate a model of a hybrid powertrain configuration by integrating a hybrid powertrain propulsion system into the fuselage of the airframe of a HELIOS aircraft designed by the university. Modeling the hybrid powertrain configuration and constructing the hybrid powertrain testbed (Gearbox, ICE, EM and battery) was done. A helios aircraft was used as reference aircraft to retrofit the hybrid powertrain, and a flight test was performed. Another study was developed by Koster et al. [22] designed a testbed to validate the design of a UAS with Hybrid propulsion system (Hyperion aircraft). The testbed and aircraft were developed to validate the simulation results obtained using controllers. The authors did not display any conclusive result in the article.
Matlock et al. [23] developed a modular testbench of a hybrid propulsion system to compare the theoretical results obtained from the simulation of the hybrid framework of a hybrid propulsion system which is used to simulate various mission profiles of an aircraft developed in MATLAB with experimental results. The components of the hybrid propulsion system were individually modeled (Propeller, lithium polymer batteries, electric motors and internal combustion engine). A hybrid power testbed was constructed, and experiments were done to validate the results obtained from the hybrid framework. A similar study was done by Boggero et al. [24] developed a virtual testbench model, a parallel hybrid electric propulsion system for UAV to select its components and construct a real test bench of the hybrid UAV. The author started by creating models of the sub-system of the hybrid propulsion system in a Matlab Simulink environment. i.e. Electric Motor, Propeller, Battery ICE. Simulations were then performed by considering a given mission profile. Another study was done by Sliwinski et al. [25] developed a methodology for retrofitting a hybrid electric propulsion system (HEPS) into an Unmanned Aerial Vehicle. The Aerosonde UAV was considered reference aircraft to retrofit the hybrid propulsion system. Its specifications were used to determine the flight dynamics and power requirement characteristics necessary to estimate the range and endurance of the retrofitted aircraft. Table 4 shows a comparison of the component’s specification used for the construction of the HE – UAV testbed selected from literature, Table 5 shows a comparison of the different drone specification for the construction of the HE – UAV testbed and Table 6 shows a comparison of testbed equipment for the construction of the HE – UAV testbed.
| Author | IC engine | Electric motor | Converter | Propeller | Battery |
|---|---|---|---|---|---|
| Aksland [15] | 19N1 Series Engine | Propulsion Motor Neu 8038-105(Test Motor) Dynamometer Motor Neu 8038-105 (Drive Motor) ZeroMax SC055R (Coupling) Hybrid ESC (Speed Contoller) | DCDC ESC and Filter Box | — | 16S7P Battery Pack Samsung 18,650 Cells (Battery) TI Evaluation Board Bq76PL455-Q1 (BMS) |
| Glassock et al. [17] | OS FX-61 Internal Combustion Engine | Plettenberg Electric Motor | DC Generation | APC 16 x6 Propeller | Flight Power EV028 |
| Ausserer [18] | Honda Motor Company | AXI Model Motors | R/C Servo to Analog Converter | APC Propellers | Thunder Power RC |
| Dehesa et al. [19] | 3W-28i Single cylinder, 2-stroke engine | KDE 7215XF-135 brushless DC motor | AC power into DC power | APC 20x10 propeller | Turnigy Graphene Panther 6 s 22.2 V, 5 Ah LiPo battery |
| Molesworth [20] | Honda GX35 Engine | AXI Electric Motor | — | 2 – bladed 18x12 APC propeller | Lithium Polymer Batteries |
| Koster et al. [21] | O.S. 0.46LA Engine Traxxas TRX 3.3 Engine | AXi 4120/20 Electric Motor | — | — | Two Max Amps 22.2 V 10 Amp Li-Po batteries |
| Matlock et al. [23] | 4-stroke Saito FG36 gas engine | TG12-4 thermoelectric generator | — | — | LiPo batteries |
| Boggero et al. [24] | 8-cylinder Diesel engine | EM2 Electric Motor | — | — | — |
| Sliwinski et al. [25] | Enya R120 4C Piston Engine | Plettenberg HP320/30 Electric Motor | — | — | Thunder Power Li-Po Air Battery |
Table 4.
Comparison of the specification of testbed components for the construction of the HE UAV testbed from different authors from literature.
| Author(s) | Drone size | Powerplant Engine | Cruise speed | Wingspan |
|---|---|---|---|---|
| Savvaris et al. [16] | 65 kg Aegis UAV Berkut 360 Canard Wing Light Aircraft | 205 hp. (Maximum Engine powerplant) | 50knots | 26′8″ |
| Ausserer [18] | RPA build by AFIT | Honda GX35 engine | — | 3.66 m |
| Dehesa et al. [19] | 18 kg AAI Aerosonde UAV | — | — | 2.89 m |
| Molesworth [20] | RPA build by AFIT | Honda GX35(35 cc) 4-stroke gasoline engine | — | 12 ft |
| Koster et al. [21] | Aircraft Designed by Daniel Webster College team | O.S. 0.46LA Engine Traxxas TRX 3.3 Engine | — | 13 ft |
| Koster et al. [22] | Hyperion Aircraft | Gas Electric Engine | 27 m/s | 3 m |
| Sliwinski et al. [25] | Aerosonde RPAS | Enya R120 4C Piston Engine | — | — |
Table 5.
Comparison of reference drone specification for the construction of the HE – UAV testbed by various authors from literature.
| Author(s) | Instruments for testbed construction | Function |
|---|---|---|
| Glassock et al. [17] | Reaction Type dynamometer Yokogawa DL50 Strain | Measures the Torque produced by the hybrid Powerplant |
| DL50 Strain Guage Amplifier | Enables rebalance of the gauges at any time during the experiment | |
| Ausserer [18] | DYNOmite Mini Eddy Dyno96V Dynamometer | Measures Torque, Speed and power produced By the hybrid powerplant |
| Max Machinery 213 piston helical flow meter | Measures Engine Fuel Flow |
Table 6.
Comparison of testbed equipment’s for the construction of the HE – UAV testbed from literature.
Advertisement
2. Conclusion
This paper attempted to explore the feasibility of constructing a prototype of hybrid power testbed of a HE-UAV. A number of technical papers in the research area were obtained from literature were selected which were addressed in the relevant sub sections of the paper; component sizing, numerical simulations and hybrid power testbed construction. A comparison between each author result was done by comparing sizing results achieve by each author from a reference drone size. In addition, a comparison of the testbed component for constructing the HE – UAV and testbed equipment used by each author was done. The results from this research shows that a HE – UAV testbed can be achieve provided stringent measures are done in determining the size of the component for a given drone size, and a careful selection of the components from the sizing result for the testbed construction.
Advertisement
Acronyms and abbreviations
UAV hybrid electric unmanned aerial vehicle | |
unmanned aerial vehicle | |
unmanned aerial system | |
hybrid electric propulsion system | |
internal combustion engine | |
electric motor |
References
- 1.
Fouellefack L, Smith L, Kruger M. Development of a novel supervisory controller on a parallel-hybrid powertrain for small unmanned aerial system. Aircraft Engineering and Aerospace Technology. 2023; 95 :401-415 - 2.
Xie Y, Savvaris A, Tsourdos A. Sizing of hybrid electric propulsion system for retrofitting a mid-scale aircraft using non-dominated sorting genetic algorithm. Aerospace Science and Technology. 2018; 82-83 :323-333 - 3.
Donateo T, Ficarella A, Spedicato L. A method to analyse and optimize hybrid electric architectures applied to unmanned aerial vehicles. Aircraft Engineering and Aerospace Technology. 2018; 5 :828-842 - 4.
Donateo T, Ficarella A. Designing a hybrid electric powertrain for a unmanned aircraft with a commercial optimization software. SAE International Journal of Aerospace. 2017; 10 :1-11 - 5.
Pornet C, Patrick V, Seitz A, Schmitz O. Methodology for sizing and performance assessment of hybrid energy aircraft. Journal of Aircraft. 2013; 52 :341-352 - 6.
Hiserote M. Analysis of hybrid-electric propulsion system designs for small unmanned aircraft systems. In: 8th Annual International Energy Conversion Engineering Conference, Ohio, USA; pp. 66-87 - 7.
Schomann J. Hybrid-electric propulsion systems for small unmanned aircraft. [Doctoral Thesis]. Munich, Germany: Technical University of Munich; 2014 - 8.
Rippl D. Sizing analysis for aircraft utilizing hybrid – Electric propulsion system. [Master’s Thesis]. Ohio, USA: Air Force Institute of Technology; 2011 - 9.
Harmon G. Neural network control of a parallel hybrid – Electric propulsion system for a small unmanned aerial vehicle. Neural Networks. 2005; 18 :772-780 - 10.
Xie Y, Savvaris A, Tsourdos A, Laycock J, Farmer A. Modelling and Control of a Hybrid Electric Propulsion System for Unmanned Aerial Vehicles. Institute of Electrical and Electronics Engineer (IEEE Aerospace Conference); 2018. pp. 1-13 - 11.
Hung J, Gonzalez F. On parallel hybrid-electric propulsion system for unmanned aerial vehicle. Progress in Aerospace Sciences. 2012; 51 :1-17 - 12.
Lei T, Wang Y, Jin X, Min Z, Zhang X, Zhang X. An optimal fuzzy logic based energy management strategy for a fuel cell/battery hybrid power unmanned aerial vehicle. Aerospace. 2022; 2 :115 - 13.
Xie Y, Savvaris A, Tsourdos A. Fuzzy logic based equivalent consumption optimization of a hybrid electric propulsion system for unmanned aerial vehicles. Aerospace Science and Technology. 2019; 85 :13-23 - 14.
Bai M, Yang W, Song D, Kosuda M, Kelemen M. Equivalent consumption minimization strategy based on fuzzy logic control for the energy management of hybrid unmanned aerial vehicle. In: Proceedings of the international Conference on Applied Energy, Kosice, Slovakia; 2021 - 15.
Aksland C. Modular modelling and control of a hybrid unmanned aerial Vehicle’s powertrain. [Master Thesis]. Urbana, Illinois: University of Illinois at Urbana-Champaign; 2019 - 16.
Savvaris A, Xie Y, Wang L, Wang S, Tsourdos A. Control and optimization of hybrid – Electric propulsion system for light aircraft. The Journal of Engineering. 2018; 13 :478-483 - 17.
Glassock R, Hung J, Gonzalez L, Walker A. Design, modelling and measurement of hybrid Powerplant for unmanned aerial systems. Australian Journal of Mechanical Engineering. 2008; 2 :69-78 - 18.
Ausserer J. Integration, testing, and validation of a small hybrid-electric remotely – piloted aircraft. [Master’s Thesis]. Ohio, USA: Airforce Institute of Technology; 2012 - 19.
Dehesa D Jr. Study of control schemes for series – Hybrid-electric powertrain for unmanned aerial systems. The Journal of Engineering. 2020; 13 :478-483 - 20.
Molesworth M. Rapid prototype development of a remotely – Piloted aircraft powered by a hybrid – Electric propulsion system. Master’s Thesis. Ohio, USA: Airforce Institute of Technology; 2012 - 21.
Koster J, Humbargar C, Serani E, Velazco A, Hillery D, Makepeace L. Hybrid electric integrated optimized system (HELIOS) design of a hybrid propulsion system for aircraft. In: 49th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Orlando, Florida; 2011. pp. 1011 - 22.
Koster J, Balaban S, Hillery D, Humbargar C, Nasso D, Serani E, et al. Design of a blended wing body UAS with hybrid propulsion. In: ASME International Mechanical Engineering Congress and Exposition, Orlando, Florida. Vol. 54877. 2011. pp. 331-337 - 23.
Matlock J, Warwick S, Sharikov P, Richards J, Suleman A. Evaluation of energy efficient propulsion technologies for unmanned aerial vehicles. Transactions of the Canadian Society for Mechanical Engineering. 2019; 43 :481-489 - 24.
Boggero L, Corpino S, De Martin A, Evangelista G, Fioriti M, Sorli M. A virtual test bench of a parallel hybrid propulsion system for UAVs. Aerospace. 2019; 7 :77 - 25.
Sliwinski J, Gardi A, Marino M, Sabatini R. Hybrid – Electric propulsion integration in unmanned aircraft. Energy. 2017; 140 :1407-1416