 Open access peer-reviewed chapter
Open access peer-reviewed chapter
Abstract
We investigated the existence of limit cycles for quintic Kukles polynomial differential systems depending on a parameter in this chapter. These systems are important in practical applications and theoretical advances. We first used formal series method based on Poincaré’s ideas to prove this point and determine the center-focus problem. We then utilized the Dulac function to prove the nonexistence of closed orbits. We determined the sufficient condition for the existence of the limit cycles, which bifurcate from the equilibrium point, using Hopf bifurcation theory. Lastly, we provided some numerical examples for illustration using MATLAB to plot. Note that studies on the existence and the nonexistence of limit cycles and algebraic limit cycles for Kukles systems are limited.
Keywords
- singular point
- center-focus
- existence
- limit cycle
- Kukles
1. Introduction
Limit cycle discovery by Poincaré in his paper Integral Curves defined by differential equations (1881–1886) [1, 2, 3, 4]. Physicists [5] failed to describe the oscillation phenomenon through the linear differential equation in the twentieth century. Van der Pol [6] proposed van der Pol equation in 1926 to describe the oscillation of the constant amplitude of a triode vacuum tube.
The limit cycle has attracted the attention of many pure and applied mathematicians. Numerous mathematical models from physics, biology, economics, engineering, and chemistry have been proposed since the 1950s to explore autonomous plane systems with a limit cycle [5, 7]. Limit cycle theory is closely related to Hilbert’s 16th problem. Exploring the existence of limit cycles is crucial in this theory. Poincaré proposed the method of topographical system, the successor function, small parameter method, and the annular region theorem to determine the existence of limit cycles. Existence, nonexistence, uniqueness, and other properties of the limit cycle have been extensively analyzed by mathematicians and physicists [8].
The problem of the existence of periodic solutions in the Liénard equation was explored in a previous study [9].
This problem has been widely investigated since the study of Liénard. The Liénard equation in the phase plane is equivalent to the system
The Liénard equation in the Liénard plane is equivalent to the system and can be expressed as follows:
where
For the more general equation
We observed that the Liénard system (3) has become invalid because
Accordingly, several limit cycles exist [9]. The problem of limit cycles of the Eq. (4) was first explored by Norman Levinson, Oliver K. Smith, and Dragilev [5].
Our work is related to the differential system of the following form:
where
Consider the polynomial differential system
Kukles provided the necessary and sufficient conditions for the origin to be centered. However, some new cases have been discovered. C. J. Christopher and N. G. Lloyd [16] explored the case
We present some necessary definitions and theorems in the first section of this chapter. We used a formal series method based on Poincaré’s ideas to determine the center focus in the second section. By the Hopf bifurcation theory, we obtained the sufficient condition for existence of limit cycles for a following quintic Kukles polynomial differential system depending on a parameter
where
2. Some preliminary results
In this section, we introduce some definitions and notations regarding the existence of the quintic differential system (8).
2.1 Conjecture
The origin, except for the linear center, is not the isochronous center of system (7) if the system has odd degree. Therefore, if the linear term contains a center, and the degree of the nonlinear term is odd, then the origin cannot be the center simultaneously.
2.2 Local results for Liénard systems
Blows and Lloyd proved the following results for system (2) in 1989, where
3. Singular point for system
The singular points for system (8) are
The following cases are presented for singular points
If
If
If
If
The following cases are presented for singular points
If
If
If
If
If
4. Nonlinear system
For system (8) the associated nonlinear system gave by calculating the following Jacobian matrix:
The characteristic equation is
Let
then the characteristic equation is
Its roots are
For singular point
where
The characteristic equation is
Its roots are
When
For singular point
The characteristic equation is
where
Its roots are
When
The Jacobian matrix for the singular point
Its characteristic equation is λ2 + 1 = 0 ⇒ λ = ±i ; then the singular point for the nonlinear system (8) is difficult to distinguish whether the singular point
5. Center-focus
Determining the center focus in the qualitative theory of differential equations, especially for the plane of the high-order polynomial differential system, is difficult and troublesome. According to the Hopf bifurcation theory, when we analyze the conditions of the limit cycle branching from the equilibrium point and the stability of the generated cycle, we must make a detailed analysis of the central focus. The qualitative analysis of a class of high-order differential systems is presented in this chapter. It is obvious that
6. Main results
6.1 Determination of the center-focus
If
If
If
If
If
where
At the right end of the above equation, starting from the third term, by making the homogeneous equations of the same order equal to zero, we can obtain series equations as follows:
Let the third power term at the right end of the Formula (9) be zero. We obtain
We take the polar coordinate of the above formula
Let the term of power four at the right end of the formula (9) be zero, we find
Similarly, we use polar coordinates to find
We discuss three situations as follows:
Since
We take
where
Then,
When
When
Simplify (note that
Let the term of power five at the end of the formula (9) be zero, then
Given that
We take the polar coordinate of the above and remove
Simplify (note that
Let the term of power six at the end of the formula (9) be zero, then
When
We take the polar coordinate of the above equation and remove
When
We take
where
When
When
Given that
6.2 Nonexistence of limit cycle
Thus,
We obtain
We obtain
When any one of the conditions in Theorem 2 is satisfied, then
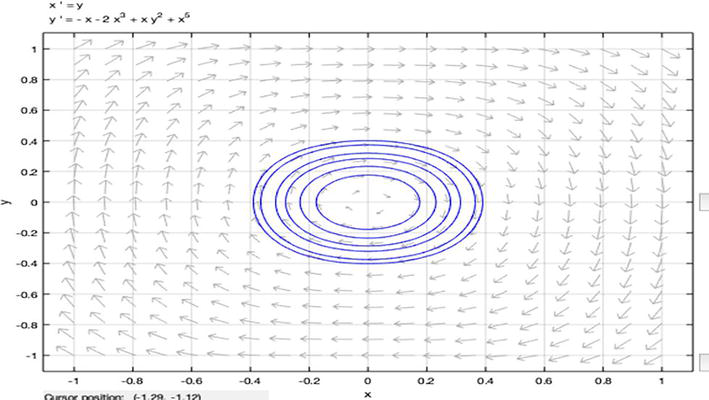
Figure 1.
Center for nonlinear system.
6.3 Existence of limit cycles
Under the conditions (2) and (4), singular point
This system is equivalent to the following system:
where
6.4 Numerical solution
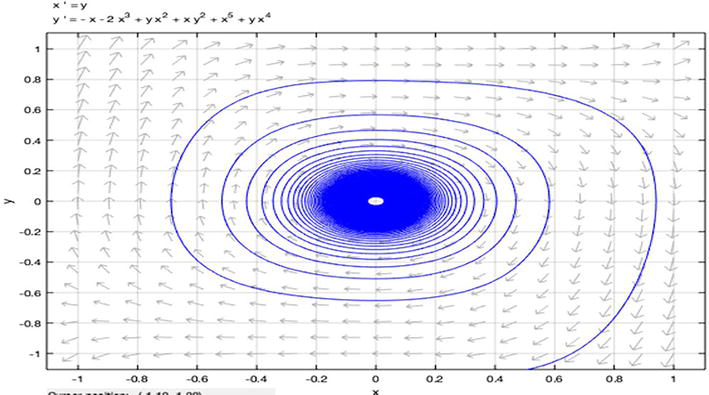
Figure 2.
Existence of the limit cycle for system
Example 2 If we set the following parameters in the system (8):
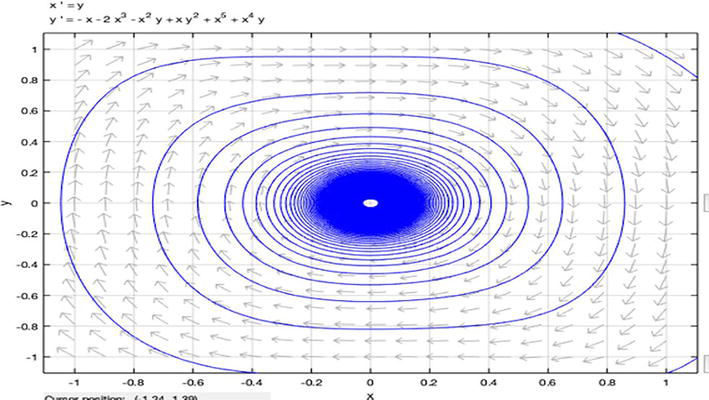
Figure 3.
Existence of the limit cycle for system
If we set the following parameters in the system (8):
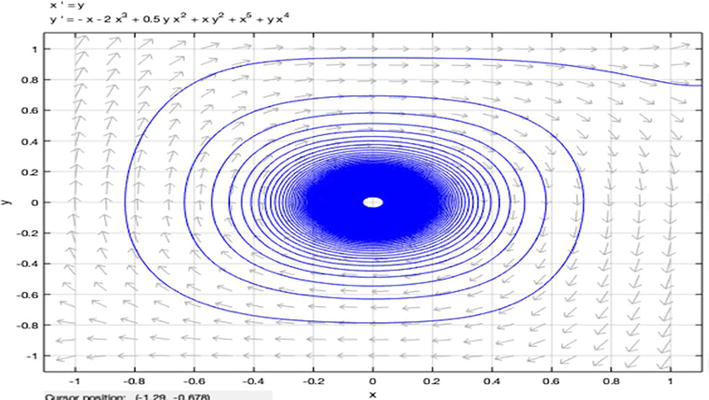
Figure 4.
Existence of the limit cycle for system
If we set the following parameters in the system (8):
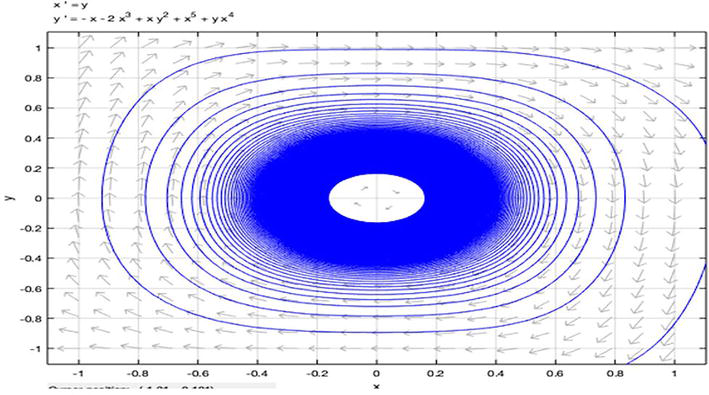
Figure 5.
Existence of the limit cycle for system
If we set the following parameters in the system (8):
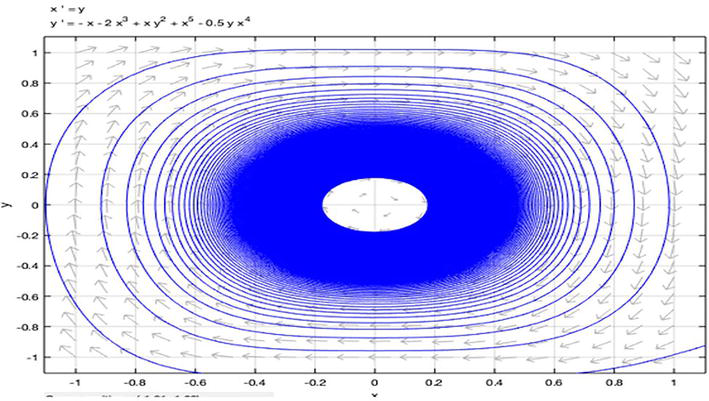
Figure 6.
Existence of the limit cycle for system
7. Conclusions
We investigated the existence of the limit cycle and used the formal series method to determine the center-focus in this chapter.
We establish the sufficient conditions for the existence of the limit cycles in system (8) that bifurcate from the equilibrium point using Hopf bifurcation theory and discuss the nonexistence of closed orbits using the Dulac function. Some examples were provided for illustration.
A number of interesting problems arise from this work. Future research in this area could include finding a general solution formula that can be used for algebraic equations of higher degrees and the calculation of system singularity. Such problems offer researchers a wealth of opportunities to expand this new area.
Acknowledgments
The authors are grateful to both reviewers for their helpful suggestions and comments.
References
- 1.
Poincaré H. Mémoire sur les courbes définies par une équation différentielle (II). Journal of Maths and Pures Applications. 1882; 8 :251-296. Available from:http://eudml.org/doc/235914 - 2.
Poincaré H. Mémoire sur les courbes définies par une équation différentielle (I). Journal of Maths and Pures Applications. 1881; 7 (I):375-422 - 3.
Poincaré H. Sur les courbes définies par les équations différentielles (III). Journal of Maths and Pures Applications. 1885; 1 (4):167-244 - 4.
Poincaré H. Sur les courbes definies par les equations differentielles(IV). Euvres de Henri Poincaré. 1985; 1 (Iv):85-162 - 5.
Ye Y-Q et al. Theory of limit cycles. The American Mathematical Society. 1986; 66 - 6.
Han M, Lin Y, Yu P. A study on the existence of limit cycles of a planar system with third-degree polynomials. International Journal of Bifurcation and Chaos. 2004; 14 (1):41-60. DOI: 10.1142/S0218127404009247 - 7.
Mattuck A. LC. Limit Cycles. Journal of Differential Equations. 2011; 2011 :1-6 - 8.
Cao J. Limit cycles of polynomial differential systems with homogeneous nonlinearities of degree 4 via the averaging method. Journal of Computational and Applied Mathematics. 2008; 220 (1–2):624-631. DOI: 10.1016/j.cam.2007.09.007 - 9.
Cioni M, Villari G. An extension of Dragilev’s theorem for the existence of periodic solutions of the Liénard equation. Nonlinear Analysis: Theory, Methods & Applications. 2015; 127 :55-70. DOI: 10.1016/j.na.2015.06.026 - 10.
Benterki R, Llibre J. Centers and limit cycles of polynomial differential systems of degree 4 via averaging theory. Journal of Computational and Applied Mathematics. 2017; 313 :273-283. DOI: 10.1016/j.cam.2016.08.047 - 11.
Giné J, Llibre J, Valls C. Centers for the Kukles homogeneous systems with odd degree. The Bulletin of the London Mathematical Society. 2015; 47 (2):315-324. DOI: 10.1112/blms/bdv005 - 12.
Giné J, Llibre J, Valls C. Centers for the kukles homogeneous systems with even degree. Journal of Applied Analytical Computers. 2017; 7 (4):1534-1548. DOI: 10.11948/2017093 - 13.
Bautin N. On the number of limit cycles appearing with variation of the coefficients from an equilibrium state of the type of a focus or a center. Maths Science Net. 1952; 1 (1939):2414 - 14.
Lloyd NG, Pearson JM. Computing centre conditions for certain cubic systems. Journal of Computational and Applied Mathematics. 1992; 40 (3):323-336. DOI: 10.1016/0377-0427(92)90188-4 - 15.
Hong Z, et al. Limit cycles for the Kukles system. Journal of Dynamical and Control Systems. 2008; 14 (2):283-298. DOI 10.1007/s10883-008-9036-x - 16.
Christopher CJ, Lloyd NG. On the paper of jin and wang concerning the conditions for a Centre in certain cubic systems. The Bulletin of the London Mathematical Society. 1990; 22 (1):5-12. DOI: 10.1112/blms/22.1.5 - 17.
Chow SN, Li C, Wang D. Normal Forms and Bifurcation of Planar Vector Fields. Cambridge University Press. 1994 - 18.
Munoz R. Introduction to Bifurcations and the Hopf Bifurcation Theorem for Planar Systems. Colarado State University; 2011. pp. 11-14 - 19.
Lynch S. Dynamical Systems with Applications Using MapleTM. Springer Science & Business Media; 2009 - 20.
Zhang Zhi-fen HW. Qualitative Theory of Differential Equations. United States of America: American Mathematical Society; 1991