Open Access is an initiative that aims to make scientific research freely available to all. To date our community has made over 100 million downloads. It’s based on principles of collaboration, unobstructed discovery, and, most importantly, scientific progression. As PhD students, we found it difficult to access the research we needed, so we decided to create a new Open Access publisher that levels the playing field for scientists across the world. How? By making research easy to access, and puts the academic needs of the researchers before the business interests of publishers.
We are a community of more than 103,000 authors and editors from 3,291 institutions spanning 160 countries, including Nobel Prize winners and some of the world’s most-cited researchers. Publishing on IntechOpen allows authors to earn citations and find new collaborators, meaning more people see your work not only from your own field of study, but from other related fields too.
To purchase hard copies of this book, please contact the representative in India:
CBS Publishers & Distributors Pvt. Ltd.
www.cbspd.com
|
customercare@cbspd.com
Let (∁) signify a simplicial complex; the topological connectivity of ∁ is denoted by ζ (∁), which equals ∁+2, where ζ is a function from the class of graphs to the set ℤ+=012…∞. Let the function ζ possesses the following characteristics: 1. ζK0=0. 2. For any graph GVE, there exists an edge xyin G such that ζGVE−xy≥ζGVE where (GVE−xy) means to remove the edge xy from the graph GVE), and ζGVE−Δxy≥ζGVE−1where (GVE−Δ(xy) means to remove the vertices xandy and all their neighbors. Then μ(ΓGVE≥ζGVE. Let ζ0 denote the maximal function ζ that satisfies the aforementioned constraints. Berger proved that μ(ΓGVE≥ζ0GVE for trees and for complements of chordal graphs. Kawamura proved the same theorem for chordal graphs, and Abd Algani proved it for circular-arc graph: Let GVE be a circular-arc graph; if ζ0GVE≤2,thenμΓGVE≤2. In this chapter, we will prove the following theorem: Let GVE be a bipartite graph; if ζ0GVE≤2,thenμΓGVE≤2.
The Arab Academic College for Education in Israel, Haifa, Israel
Amal Sharif-Rasslan
The Arab Academic College for Education in Israel, Haifa, Israel
*Address all correspondence to: yosefabdalgani@arabcol.ac.il
1. Introduction
The set ∁≠ϕ is a simplicial complex if ω∈∁ and λ⊆ω indicate λ∈∁. Each simplicial complex has a distinctive (up to homeomorphism) geometric recognition, specifically an inserting in the space Rn, wherein each simplex ω∈∁ is grasped as a homeomorph of a simplex in Rn.
The connection between two simplicial complexes M and N is called join, and it will be denoted by M∗N and is defined as
M∗N=ω∪λω∈MλN.
The topological space X∗vvertex is called a cone over X and is denoted by ∁vX. And the topological space X∗S0 is called a suspension and is denoted by susp−M.
A complex would be identified by its geometric recognition. The topological connectivity of a simplicial complex ∁ is the biggest number ∁0 that being said for each number d≤∁0, each inserting of the d-dimensional sphere Sd is extendable to an inserting of the d+1-dimensional ball Bd+1 in ∁. The connectivity of a complex could be infinite. The connectivity of ∁+2 is signified by μ∁. This is because the addition of 2 makes the creation of some grades more sophisticated.
For a graph GVE with the vertex set V and edge set E, a subgroup U of V is no two distinct vertices of U in V are adjacent. A subgroup S of V is leading in GVE if each vertex v∈V is nearby to a vertex of S. The dominance number δGVE is the lowest of the cardinality of leading groups of GVE:δGVE=minS:Sis dominating inGVE.
Let H be a graph; we signify by ΓH the simplicial complex containing all the autonomous groups of vertices in H. Let Vk,k≤m, be a divider of the vertex set of a graph G. Given a vertex v∈VGVE, we write kv for the index k for which v∈Vk. For a set Z of vertices, we write ΓZ=kz:z∈Z. Typically, we signify the set 1…f by f. Assuming a subset Γof f, we write VIforUk∈KVi.
Consider a graph GVE with a divider V1,V2,…,Vf of its vertex set. A select of one vertex from every set Vi is termed an autonomous structure of representative (ISR) if the designated vertices are nonadjacent in GVE. The connection between topological connectivity and ISR was recognized in [1]. Existence of ISR:
Theorem 1. If for all Γ⊆f
μΓGVEVΓ≥Γ,
then the partition Vkk≤f of VGVE has an ISR.
Graph GVE is a bipartite graph if there is a division of V into two groups, A and B, so that every edge of GVE has one end at A and the other at B. In this instance, there occurs an ISR if and only if the graph is not a whole bipartite. But not being complete bipartite means the presence of a linking in ΓGVE between both simplices V1 and V2 of Γ(GVE). Consequently, not being a whole bipartite is equal to ΓGVE being related, which, in the aforementioned terminology, means being zero-connected, which means that μΓGVE≥2. Consequently, in this instance, the state of the theorem is not only adequate but also essential. The following theorem is due to Ahrone [1]; we carry here its new formulation.
Theorem 2. Let (∁) signify a simplicial complex and ζ∁ denote the topological connectivity of ∁, which equals ∁+2. Let ζ be a function from the class of graphs to the set ℤ+=012…∞.
Let the function ζ possess the following characteristics:
ζK0=0
There exists, for any graph G, an edge xy in G,
ζGVE−xy≥ζGVE
(GVE−xy) means to remove the edge xy from the graph GVE),
and
ζGVE−Δxy≥ζGVE−1.
Then
μ(ΓGVE≥ζGVE.
(GVE−Δ(xy) means to remove the vertices xandy and all their neighbors).
Let ζ0 denote the maximal function ζ that satisfies the aforementioned constraints.
Actually, there exists a maximal function ζ0 filling the conditions of the theorem. It is best defined in terms of a game between two actors: (a) and (b). Player (a) needs to take full benefit of the functionζ in the theorem (and hereafter show that ζ is big), whereas player (b) needs to minimize ζ. Player (a) chooses an edge e=xy in the graph assumed at the current phase of the game. Player (b) selects between two options: he or she either (I) removes e from the graph, or else (II) erases all neighbors of the vertices x and y (including, x and y themselves). The game finishes when either there remains a secluded vertex, in which case ζ is well-defined as ∞, or there are no remaining vertices, in which case ζ is recognized as the number of steps of player (b) of type (II).
We describe ζ0GVE as the maximal value of ζGVE player (a) can gain in the game. Moreover, it was declared that μΓG≥ζG.
We can also describe ζ0 recursively in the following way:
Aharoni and colleagues [1] proved the following assumption:
Theorem 3.
μΓGVE=ζ0GVE
Kawamura [2] showed the theorem for chordal graphs. Now, we describe a chordal graph that is defined as follows: A graph is chordal if each of its cycles of four or more nodes has a chord, which is an edge linking two nodes that are not together in the cycle.
The chordal graphs are the joint graphs of subtrees of a tree. A typical theorem of Dirac [3] declares that for each chordal graph G, there is a vertex, named a simplicial vertex, such that Δv is a complete graph.
In a previous study [4], Abd Algani showed the theorem for circular-arc graphs, which is known as the joining graphs of a set of arcs on a circle. This graph comprises one vertex for each arc in the set and an edge connecting every two vertices whose arcs intersect.
Officially, let
Γ1,Γ2,…………,Γn⊆S1
be a set of arcs. Then, the corresponding circular-arc graph is G, such that
V=Γ1Γ2…………Γn
and
ΓαΓβ∈E⇔Γα∩Γβ≠∅.
A group of edges that parallels to GVE is termed an arc model of GVE.
Theorem 5. Let GVE be a chordal graph; then, ζ0GVE¯=∞.
Theorems 2, 3, and 5 were shown in [5] for complements of chordal graphs and for trees. Kawamura [2] verified the theorem for chordal graphs.
Theorem 6. Let GVE be a chordal graph. Then, ΓGVE is either contractible1 or is homotopy2 equal to the section of finitely several spheres ⋁Skt where kt≥δGVE−1for eachkt.
On the contrary, all limited wedges appear as homotopy types of independence complex of chordal graphs.
Theorem 7. Let L be a simplicial complex and let k1,…….,kr be subcomplexes of L (repetitions allowable). Consider individual points u1,……….,ur and vwith u1………urv∩L;then, the union
Λ=∁vL∪⋃i=1rCui∩Ki
subject to the conditions
CuiKi∩CvL=Kiand
∁uiKi∩∁ujKj=Ki∩Kjij=1….ri≠j.
Is homotopy corresponding to ⋁i=1rsuspKi
The suspension suspΛ is contractible for each contractible complex Λ.
susp⋁Skr≈⋁Skr+1.
Theorems 7–10 [1, 3] offer us a strong understanding of the construction of chordal graphs’ independence complexes.
For a vertex v of a graph GVE, let ΓvGVE be the subcomplex generated by the independent sets containing v:
ΓvGVE={U∣there existsasimplexB∈ΓGVEsuch that
v∈BandU⊂B.
Theorem 8. Let GVE be a graph and let v be a simplicial vertex of GVE. Enumerate Δv as Δv=w1……wr. Then, we have the following:
ΓGVE≈⋁suspΓG−Δwi.
For every chordal graph GVE, we term μGVE∈ℤ+as follows: if ΓGVE is contractible, then let μGVE=∞, and if ΓGVE is homotopy equal to the wedge ⋁Sir, then let μGVE=minir, the minimum dimension of the related spheres. Theorems 6 and 7 offer the following theorem:
Theorem 9. Let GVEbe a chordal graph; then, μGVE≥δGVE−1.
Theorem 10. Let v be a simplicial vertex of the graph G(V, E) and enumerate Δv as Δv=w1……wr.Then, we have the equation μGVE=minμGVE−Δwk│k=1……r+1.
And we can agree that min∞……∞+1=∞.
For the path graph Pn with n edges, ΓPn is contractible if n≡0mod3 and is homotopy equal to the sphere of n3dimension. Then, we have the following equation:
μPn=∞,ifn≡0mod3n3,otherwise.
It should be noted that Kawamura [2] proved Theorems 6–10 for chordal graphs. In previous research [4], Abd Algani proved Theorem 2 about circular-arc graphs. In addition, in the same paper, he found that for path graph (Pn):
μPn=ζ0Pn=∞,ifn≡0mod3n3,otherwise.
Moreover, for the general case of circle graph (∁n), it was determined that
In a previous paper, Abd Algani [4] demonstrated the following theorem:
Let GVE be a circular arc graph; if ζ0GVE≤2, then μΓGVE≤2.
In this chapter, the theorem will be generalized for a bipartite graph.
Main theorem: Let G be a bipartite graph; if ζ0GVE≤2, then μΓGVE≤2.
Proof.
Let GVE be a bipartite graph, that is, a graph with the property: if we remove each edge in the graph with all its neighbors, the graph that we will be obtain is a complete bipartite graph.3
We need to prove that if ζ0G≤2, then μΓG≤2.
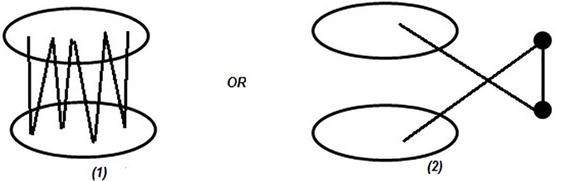
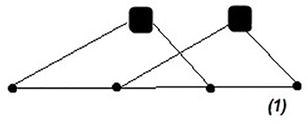
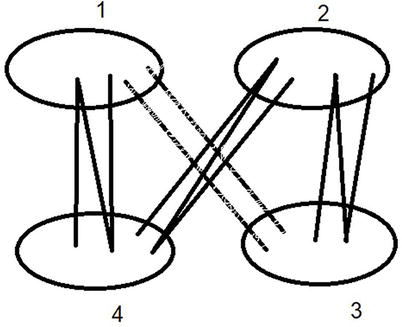
First, we remove all the possible edges. In this situation, the graph will look like Figure 1.
Figure 1.
The graph looks like (1) or (2) when we remove all possible edges.
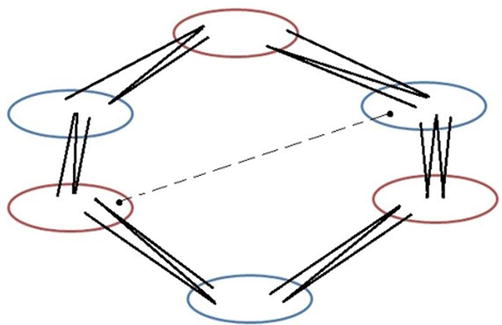
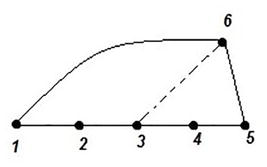
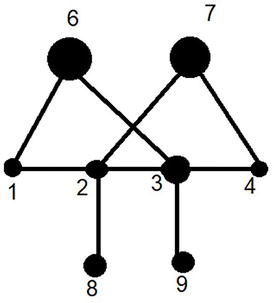
The graph of ∁6 is a bipartite graph, and each set is an independent set (see Figure 2). Now, color the sets by two colors, for example, red and blue, as follows: Mark the graph vertices with colors such that no two vertices sharing the same edge have the same color (see Figure 2).
Figure 2.
The inflated graph of C6.
Each set has a vertex, where the set front does not have a neighbor, so we have built the largest set of vertices (see Figure 2).
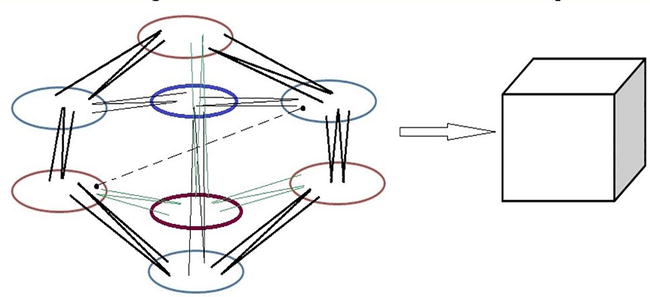
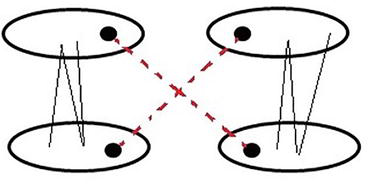
The result leads to a construction, as clarified in Figure 3.
Figure 3.
The result of performing a retraction is a cube.
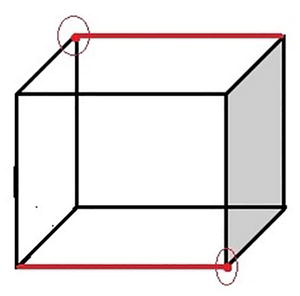
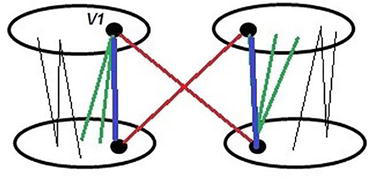
The result of performing a retraction4 is a cube. The cube has two foreign edges and two various vertices (see Figure 4). If the path P4 exist in the bipartite graph and the path P5 not exist, then:
Figure 4.
The cube has two foreign edges and two various vertices.
If we insert a vertex into the path P4, as clarified in Figure 5: If we remove their edge 1 (see Figure 5), then we have two isolated vertices.
Figure 5.
The form of the neighbors of P4.
If we have path P4 and path P5 and do not have ∁6 (see Figure 6). In Figure 6, if we remove edge 34 with all of its neighbors, the remaining graph is a complete bipartite graph; then, vertex (1) and vertex (6) remain and are connected by an edge, and we obtain graph ∁6.
Figure 6.
Without C6.
If we cannot remove the edges from the graph, then μ=2.
Now, we prove that μ=2 before we remove any edges. We have three cases.
Case 1: The graph resembles Figure 7; the red edges may not exist. If there are no edges (red edges in Figure 7), then we perform a retraction, with the result being an induced matching.
Figure 7.
If there are no red edges, then we perform a retraction, with the result being an induced matching.
Case 2: With the existence of the red edges, the graph will resemble Figure 8: If we remove the “Blue” edge (between two sets) with all of its neighbors, then the vertex V1 will be isolated.
Figure 8.
Existence of red edges.
We can remove the “Green” edges in Figure 8, and we can remove the (main) “Black” edges in the same figure, then we have two connected components.
Note that the situation, as described in Figure 9, cannot exist, because there is a vertex in set 1, which is not connected to a vertex in set 3 by an edge, and therefore, the complementary complex is a chordal graph; thus, μ=ζ0=∞.
Figure 9.
This situation cannot exist.
If we have a bipartite graph, and we know that the complementary independent complex of a bipartite graph is a chordal graph, then μ=ζ0=∞.
In the case of P4 (see Figure 10), if we remove edge 34, then the vertex V1 is isolated.
Figure 10.
If we remove edge 34, then vertex V1 is isolated.
We cannot remove edge 23 because the vertices v2 and v3 are two dominating vertices.
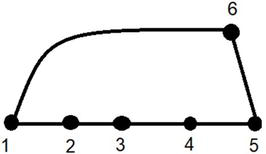
Case 3: After we remove all possible edges, we obtain P5 (but do not have C5); we cannot remove edge 12 (see Figure 11) because v6 is a neighbor of v5. This situation is C6.
Figure 11.
We cannot remove edge 12.
Thus, we have found the independence complex of the topological connectivity of the bipartite graph:
In this chapter, we found that the topological connectivity of the bipartite graph’s independence complex where the theorem that if ζ0GVE≤2,thenμΓGVE≤2 is proven for a bipartite graph GVE by examining all possible cases. For future research, we recommend trying to prove that μ(ΓGVE≥ζ0GVE for bipartite chordal graphs (the topological connectivity of independence complex of bipartite chordal graph). It is worth noting that the topological connectivity of independence complex has been proven previously for trees and complements of chordal graphs by Berger [5], for chordal graphs by Kawamura [2], and for circular-arc graph by Abd Algani [4].
References
1.Aharoni R, Berger E, Ziv R. Independent systems of representatives in weighted graphs. Combinatorica. 2007;27:253-267. DOI: doi.org/10.1007/s00493-007-2086-y
2.Kawamura K. Independence complex of chordal graphs. Elsevier, Discrete Mathematics. 2010;310:2204-2211. DOI: doi.org/10.1016/j.disc.2010.04.021
3.Dirac GA. On rigid circuit graphs. Abhandlungen aus dem Mathematischen Seminar der Universität Hamburg. 1961;25:71-76. DOI: doi.org/10.1007/BF02992776
4.Abd AY. The topological connectivity of the Independence complex of circular-arc graphs. Universal Journal of Mathematics and Applications. 2019;2(4):159-169. DOI: DOI.org/10.32323/ujma.556457
5.Berger E. Topological Methods in Matching Theory [thesis]. Faculty Of Princeton University in Candidacy; 2004
Notes
Let X be a topological space; we said that X is contractible if the identity map on the topological space X is null-homotopic.
Two continuous functions from one topological space to another are said to be homotopic if one can be “continuously deformed” into the other; this distortion is referred to as the homotopy between the two functions.
A complete bipartite graph is a bipartite graph that contains all possible edges.
Definition: Let X be a topological space, let A⊆X, and let i:A↪X be the inclusion map. Continuous map f:X→A is called a retraction if fA=idA.
Written By
Yousef Methkal Abd Algani and Amal Sharif-Rasslan
Submitted: 30 December 2022Reviewed: 13 January 2023Published: 17 March 2023
 Open access peer-reviewed chapter
Open access peer-reviewed chapter