
Abstract
On the one hand, controllability and observability relate to the ability to control and observe the state of a dynamical system. On the other, controllability and observability are known as structural properties relating to internal connections of dynamical systems. If the dynamical system is nonlinear, subtle differences between these two occur and defining and computing these properties becomes very much more complicated, because they rely on differential geometry instead of linear algebra. One contribution of this chapter is to define and compute controllability and observability of analytical dynamical systems in a particularly simple, unifying manner, based on connectivities and sensitivities. A second contribution is to present a new canonical form of controllability and observability singularities, showing that these are essentially initial states that permanently switch-off connections to the input and output of the system. The third and final contribution is to show that by considering these singularities as different systems, nonlinear system structure becomes a global property, instead of a local one. What does remain local are state-transformations transforming dynamical systems into canonical forms revealing system structure. By using these canonical forms as the starting point, our simple, unifying definitions of controllability and observability are obtained. Examples are presented to illustrate these results.
Keywords
- canonical forms
- controllability
- observability
- accessibility
- reachability
- Kalman decomposition
- structural singularities
- lie algebraic rank conditions (LARC)
- sensitivity rank conditions (SERC)
- sensitivity-based algorithms
1. Introduction
Initiated by Kalman, between 1955 and 1970 the use of state-space representations and time-domain analysis led to a series of discoveries of fundamental concepts and design methodologies for the control of both linear time-invariant and linear time-varying dynamical systems having multiple input- and output-variables. Until then, most analyses were limited to the frequency domain and linear time-invariant systems with only a single input-variable and output-variable. Notable discoveries were the controllability and observability properties of linear systems [1, 2], and that these are dual as well as structural properties [3]. They play an important role in the solution of the linear quadratic state and output feedback design problems, as well as the realization problem of input–output maps [1, 4, 5]. Around the same time, Bellman [6] and Pontryagin [7] laid major foundations for optimal control theory applicable to multivariable nonlinear systems. Together with the development of computers, this facilitated the design and implementation of optimal feedback control systems for nonlinear dynamical systems on computers available at the time [8].
Around 1970, attempts started to generalize the theory and concepts developed for linear systems to nonlinear systems. The nonlinearity of systems significantly complicates concepts. System properties generally become local instead of global, and the corresponding mathematics requires differential geometry instead of linear algebra. Differential geometry very much complicates definitions, derivations, and computations involving Lie algebras. Still, nonlinear system theory managed to generalize most aspects of linear system theory [9, 10, 11]. Despite the many complications associated with nonlinear system theory, the Kalman decomposition and other canonical representations of nonlinear dynamical systems turn out to posses the same simple structure as those obtained for linear systems [2, 3, 9, 11]. This important observation will be exploited in this chapter.
More recently, controllability and observability of large complex networks have become an important research topic. Although large networks are very often modeled by linear dynamics, chemical networks are generally nonlinear, requiring analysis of what is sometimes called nonlinear controllability and nonlinear observability [12, 13, 14, 15, 16]. Sensitivity-based algorithms are a promising development to determine these properties, especially for large-scale nonlinear dynamical systems [17, 18]. They reveal the importance of connectivities and sensitivities in defining and computing controllability and observability as explained and illustrated in this chapter.
As opposed to ordinary dynamical system representations, canonical representations reveal connections of state-variables to the input and output in a straightforward manner that can therefore be visualized using directed graphs. An important contribution of linear and nonlinear system theory was to discover these canonical representations that can be obtained for any dynamical system by a suitable change of state-space coordinates. This change of coordinates is realized by a state-transformation that may hold only locally. This situation is sketched in Figure 1.
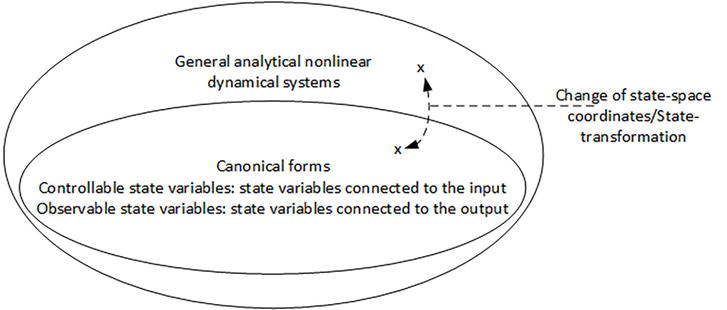
Figure 1.
Canonical forms facilitating simple definitions/explanations of controllability and observability as connectivities to the input and output representing structural properties of dynamical systems. Changes of coordinates/state-transformations connect general analytical nonlinear dynamical systems to their canonical forms.
Given the situation sketched in Figure 1, we asked ourselves the following question: “
This chapter provides a positive answer by showing that canonical representations reveal structural properties easily and naturally. This allows us to define controllability and observability based on these connectivities. By first considering the structure of canonical forms, the mathematical complexity only comes in
Remarkably, a canonical representation related to controllability/observability singularities, being points in the state-space where controllability/observability properties change, seems not to have been considered in the literature. A canonical form of controllability/observability singularities will be presented here and shown to be the key to considering nonlinear system structure as a global property, instead of a local one.
The terminology used in this chapter coincides with that commonly used in nonlinear system theory with one notable exception. What comes out as controllability in this chapter, is commonly known as local strong accessibility if the system is nonlinear and affine in the input [9, 10, 18, 19, 20]. We reflect on this notable exception and other results of this chapter in the conclusion section.
2. State-space representation of dynamical systems
To facilitate their analysis, numerical solution and control, dynamical systems described by ordinary differential equations are often represented in the so-called state-space form given by
Within this formulation
In Eq. (3),
3. Canonical state-space representations of dynamical systems
3.1 Controllability as obtained from its canonical form
Reconsider Figure 1 and let
represent the state-transformation that locally puts the system (1) into what will be called the
In Eq. (5), the transformed state
In the controllability canonical form (5), if
1) Along trajectories of analytical systems (1), (3) the number of controllable modes
1) and 2) follow from the Hermann-Nagano theorem in [22] according to which the state-space of an analytical dynamical system (1), (3) foliates into manifolds of dimension
Within the controllability canonical form (5), uncontrollable state-variables
Definition 1 together with Corollary 1 are graphically represented by Figure 2. From them the following alternative definition of controllability in terms of connectivities is obtained.
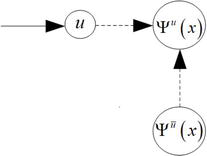
Figure 2.
Graphical representation and partitioning of a system with an input
Analytical dynamical systems (1), (3) are controllable along a trajectory if in the controllability canonical form (5) no state-variable
Computation of the state-transformation
Without having to compute the state-transformation (4), sensitivity-based algorithms very efficiently compute
Follows from [18] in which
3.2 Observability as obtained from its canonical form
A development very similar to that of controllability in the previous section applies to observability. Because of this similarity, this section focuses on the differences. Reconsider Figure 1 and let
now represent the state-transformation that locally puts the system (1)–(3) into what will be called the
In Eq. (7), the state
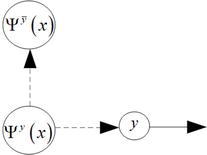
Figure 3.
Graphical representation and partitioning of a system with an output
To
Following Remark 2, all canonical forms have the property that the system parts do not cause additional uncontrollable/unobservable modes.
3.3 The Kalman canonical form of analytical nonlinear dynamical systems
Partitioning of systems along trajectories into parts that do and do not connect to the system input and output were obtained in sections 3.1, 3.2. These parts are represented by controllable/uncontrollable and observable/unobservable modes. These two separations lead naturally to a separation into four system parts, as represented for linear systems by the Kalman decomposition [3]. A similar decomposition for nonlinear system exists [9, 10, 11]. As before, the latter decomposition is obtained from a suitable state-transformation
that now transforms the system into the form
where
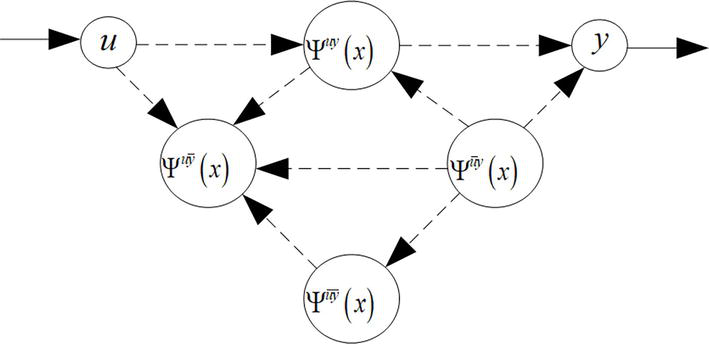
Figure 4.
Graphical representation and partitioning of a system with input
Not all system parts in Figures 2-4 have to be present. Also, not all internal connections have to be present as long as the connectivity of system parts with the system input and output remains unchanged. In Figure 4 for example, the connection from
From Figure 4 observe that
4. Controllability/observability singularities: Initial states affecting nonlinear system structure
Linear systems are described by (1)–(3) with
For analytical nonlinear dynamical systems (1)–(3) however, this need no longer be the case. Initial states may switch-off, i.e. disconnect, connections to the input and output, thereby changing the system structure [16, 23]. To illustrate this, we start with an example presented in the next section.
4.1 Examples and definition of controllability/observability singularities
Example 1
If, in Eq. (11), we take
Controllability singularities occur for instance in chemical systems when zero initial concentrations of some species prevent subsequent chemical reactions to occur [15]. They are different from what are mostly called
In Example 1, if
We deliberately
For analytical dynamical systems (1)–(3),
The canonical representations of controllability/observability singularities will be given in the next section and the proof in Appendix 2. As to controllability, observe that Definition 3 and Theorem 3 comply with the Hermann-Nagano theorem [22], stating that for analytic systems (1)–(3) the number of uncontrollable modes
4.2 Canonical state-space representations of controllability/observability singularities
To obtain the canonical representation of controllability singularities, we start from the controllability canonical representation (5) dropping accents of transformed states. We denote by
To the controllability singularities
Eq. (15) describes that if
In a similar fashion, starting from the observability canonical representation (7), observability singularities
To the observability singularities
Eq. (19) describes that if
By considering controllability/observability singularities as
From Theorem 1, the number of controllable and observable modes is constant along any trajectory of an analytical dynamical system (1)–(3). Therefore, these only depend on the initial state of a trajectory. By Definition 3, controllability/observability singularities are the only ones changing system structure.
5. Determining system structure through sensitivity-based algorithms
5.1 Determining controllability/observability of systems and individual state-variables
Because uncontrollable state-variables and modes are disconnected from the input, their sensitivity to input-variables vanishes. Because unobservable state-variables and modes are disconnected from the output, the sensitivity of the output to them, vanishes. Sensitivity-based algorithms capture these insights by calculating a sensitivity matrix
A state-variable
5.2 A challenging small-scale example containing two controllability singularities
Although being small-scale, the example presented next is a challenging one, because it contains two controllability singularities. Also, close to the singularity, transformed state-variables that have to be computed by the sensitivity-based algorithm, tend to grow very large. The example illustrates the Hermann-Nagano theorem in [22], which is used and described in the proof of Theorem 1, as well as the canonical form of controllability singularities.
Example 2: An uncontrollable system with two controllability singularities.
System (20) originates from [11], example 3.8. From the analysis of this example in [11], we conclude that system (20) has a single uncontrollable mode foliating the state-space into submanifolds with dimension 2. These submanifolds are tori given by the equation
with
Figure 5 concerns the controllability of system (20). It graphically represents the singular values

Figure 5.
Singular values (left panel) and controllability signature (right panel) of system
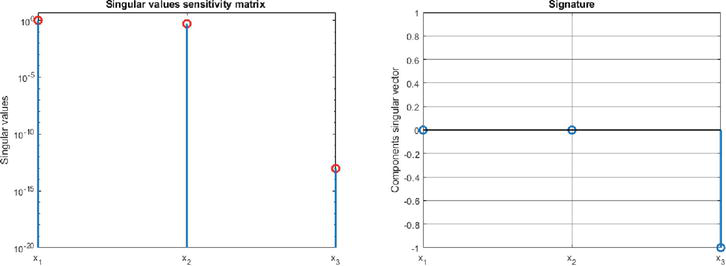
Figure 6.
Singular values and controllability signature after transformation
Figure 7 shows directed graphs of the original system (20) (left panel) and its controllability canonical form (right panel). Observe that only the latter directed graph reveals uncontrollability, illustrating that directed graphs only reveal uncontrollability/unobservability, when the system is represented in canonical form (minus permutations of state-variables).
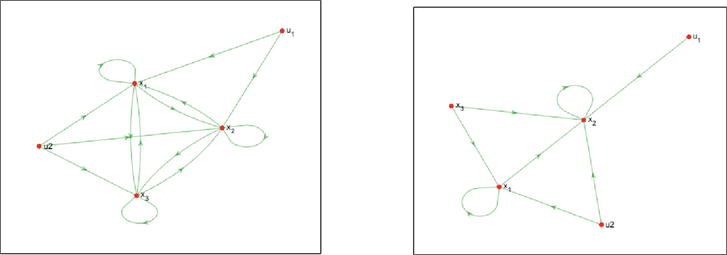
Figure 7.
Directed graph of system
In the next section we will show how each of the two controllability singularities can be made to match the canonical singular controllability form (14), (15). Note that this canonical form is obtained as a special case of the controllability canonical form (5). The latter canonical form will therefore also be obtained in the next section.
5.2.1 Canonical representations of the two controllability singularities
For system (20), the controllability singularity
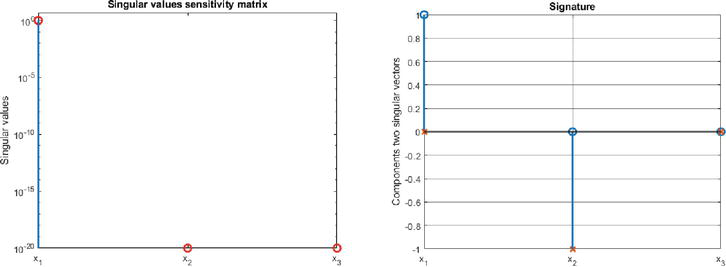
Figure 8.
Singular values (left panel) and controllability signature (right panel) of the controllability singularity
Since
with
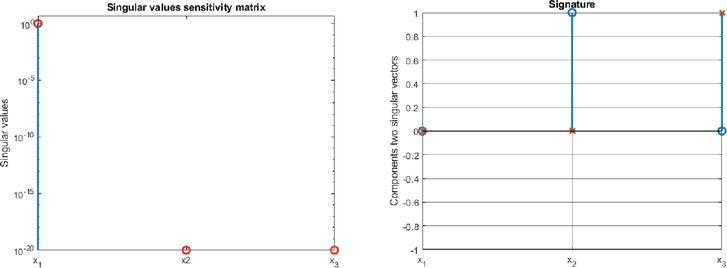
Figure 9.
Singular values and controllability signature after transformation
The second controllability singularity of system (20) concerns initial states satisfying
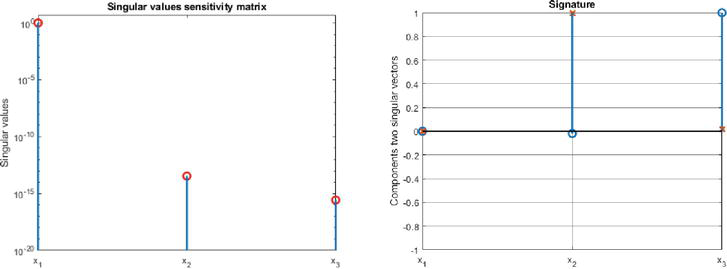
Figure 10.
Singular values and signature after transformation
As a second example we reconsider system (11), (12) of Example 1. From our sensitivity-based algorithm we find system (11) to be controllable, since the singular values obtained are
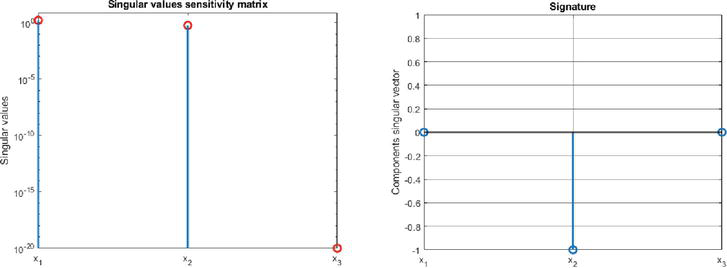
Figure 11.
Singular values (left panel) and controllability signature (right panel) of the controllability singularity
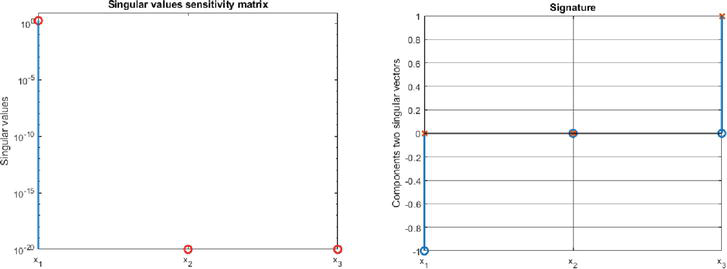
Figure 12.
Singular values (left panel) and observability signature (right panel) of the observability singularity
To summarize, for system (11), (12) of Example 1,
5.3 Large-scale examples
To illustrate and challenge the capability of sensitivity-based algorithms to solve high-dimensional problems efficiently, we generated large-scale nonlinear dynamical systems having 200 state-variables and 25 input-variables, following Remark 2 at the end of Section 3.3. Within the controllability canonical form of linear systems [3, 21], we selected the nonzero parts of the time-invariant system matrices random, while taking different values for the number of uncontrollable state-variables:
We applied the sensitivity-based algorithm to the nonlinear systems with state
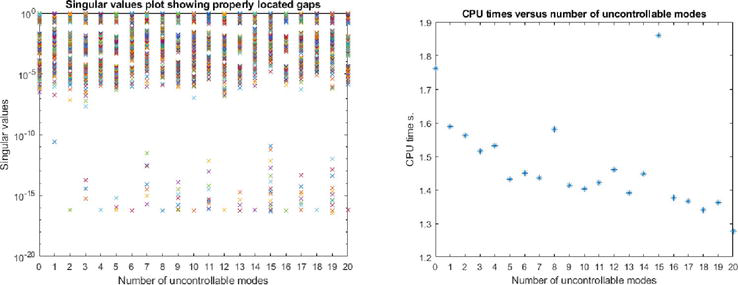
Figure 13.
The sensitivity-based algorithm correctly (left panel) and efficiently (right panel) establishes the number of uncontrollable modes of systems with 200 state-variables and 25 input-variables: The number of uncontrollable modes in each case equals the number of numerically zero singular values because some of these overlaps.
It shows that all gaps in the singular values are properly located (recognizing that several singular values overlap), because the number of singular values below this gap should be considered numerically zero, each one corresponding to an uncontrollable mode. The right panel shows the very short CPU times required to compute each result that is based on the concatenation of sensitivity matrices of three short trajectories. For details concerning the sensitivity-based algorithm we refer to [17, 18, 28]. We only mention here that, by exploiting duality, the sensitivity-based algorithm is also able to establish observability of nonlinear systems. The computations we performed on an ordinary PC using MATLAB.
6. Conclusions
We showed how
As for the restriction in this chapter to only study analytical dynamical systems, we remark that systems not belonging to this class are usually piecewise analytic. Then the analysis and results of this chapter apply to each separate interval over which the system is analytic. We also remark that by augmenting the system state with constant parameters, we can include the structural property identifiability as a special case of observability.
Originally, controllability is the ability to steer the system from any state to another, by means of the input. According to the analysis and definitions presented here, controllability relates to the connectivity of internal state-variables and modes to the input. For linear systems they are equivalent. If the system is nonlinear and affine in the input, our definition of controllability corresponds to what in the literature is usually called local strong accessibility, that is a slightly weaker property if the drift term is nonzero. As for the observability of dynamical systems, no such subtle difference occurs.
Starting from conventional canonical forms, we constructed
If the state-space model has been developed from first principles (e.g. energy conservation, Newton’s laws), state-variables have a clear meaning and interpretation. Since sensitivity-based algorithms provide the state-variables involved in the uncontrollable and unobservable modes, they then immediately provide the exact information a system modeler, designer or engineer is interested in.
Acknowledgments
The author likes to thank Hans Stigter, Jaap Molenaar, Dominique Joubert and Andrew Laidlaw for providing valuable ideas, discussions and suggestions that improved, and partly inspired, this chapter.
Declarations
The author has no conflicts of interest to disclose.
The author has no relevant financial or non-financial interests to disclose.
Data will be made available on reasonable request.
.
A. Appendix 1. Example 2 and the local character of its state-transformations.
The state-space of system (20) in Example 2, according to [11] example 3.8, is foliated as represented by Figure 14.
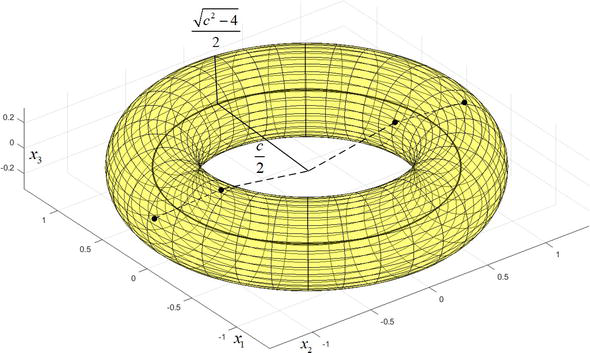
Figure 14.
The manifolds of example 2 are tori described by
In Section 5.2.1, we reasoned and showed that state-transformations (22) and (23) transform the two controllability singularities of system (20) into the corresponding two canonical singular controllability forms. The inverse of state-transformation (23) corresponding to the singularity
The inverse of state-transformation (22) corresponding to the singularity
B. Appendix 2. Proof of theorem 3.
To proof Theorem 3 we will need the following lemma.
For analytic systems (1)–(3) a controllability canonical form (5) exists in which all uncontrollable state-variables are constant. This also applies to controllability singularities.
For analytic systems (1)–(3), having
with
As to controllability singularities, i.e. when
The controllability canonical form of Lemma A2.1 applied to controllability singularities
As to the canonical singular observability form, the situation is slightly more complicated. A Kalman decomposition of the system (1)–(3), given by (9), may be applied at regular points close to the singularity. From this canonical form, consider the part containing the observable state-variables
Because the reduced system (26) captures all observable modes, which are turned into observable state-variables, it will still contain the observability singularity. Also, it will still contain the switching state-variables
References
- 1.
Kalman RE. Contributions to the theory of optimal control. Boletin De La Sociedad Matematica Mexicana. 1960; 5 :102-119 - 2.
Kalman RE. Mathematical description of linear dynamical systems. Journal of the Society for Industrial and Applied Mathematics - Series A. 1963; 1 (2):152-192. DOI: 10.1137/0301010 - 3.
Kalman RE. Canonical structure of linear dynamical systems. Proceedings of the National Academy of Sciences of the United States of America. 1962; 48 (4):596-600 - 4.
Joseph DP, Tou TJ. On linear control theory. Transactions of the American Institute of Electrical Engineers, Part II: Applications and Industry. 1961; 80 (4):193-196. DOI: 10.1109/TAI.1961.6371743 - 5.
Ho BL, Kalman RE. Effective construction of linear state-variable models from input/output functions. at-Automatisierungstechnik. 1966; 14 (1–12):545-548. DOI: 10.1524/auto.1966.14.112.545 - 6.
Bellman R. Dynamic programming and Lagrange multipliers. Proceedings of the National Academy of Sciences of the United States of America. 1956; 42 (10):767-769 - 7.
Kopp RE. Pontryagin maximum principle. In: Leitmann G, editor. Optimization Techniques, vol. 5, Mathematics in Science and Engineering. Amsterdam: Elsevier; 1962. pp. 255-279. DOI: 10.1016/S0076-5392(08)62095-0 - 8.
Athans M. The role and use of the stochastic linear-quadratic-Gaussian problem in control system design. IEEE Transactions on Automatic Control. 1971; 16 (6):529-552. DOI: 10.1109/TAC.1971.1099818 - 9.
Nijmeijer H, Van der Schaft AJ. Nonlinear Dynamical Control Systems. Vol. 175. New York: Springer; 1990 - 10.
Isidori A. Nonlinear Control Systems. London: Springer Science & Business Media; 2013 - 11.
Kwatny HG, Blankenship G. Nonlinear Control and Analytical Mechanics: A Computational Approach. Berlin: Springer Science & Business Media; 2000 - 12.
Angulo MT, Aparicio A, Moog CH. “Structural accessibility and structural observability of nonlinear networked systems.” IEEE Transactions on Network Science and Engineering. Jul 2020; 7 (3):1656-1666. DOI: 10.1109/TNSE.2019.2946535 - 13.
Kawano Y, Cao M. Structural accessibility and its applications to complex networks governed by nonlinear balance equations. IEEE Transactions on Automatic Control. 2019; 64 (11):4607-4614. DOI: 10.1109/TAC.2019.2901822 - 14.
Drexler DA, Virágh E, Tóth J. Controllability and reachability of reactions with temperature and inflow control. Fuel. 2018; 211 :906-911. DOI: 10.1016/j.fuel.2017.09.095 - 15.
Drexler DA, Tóth J. Global controllability of chemical reactions. Journal of Mathematical Chemistry. 2016; 54 (6):1327-1350. DOI: 10.1007/s10910-016-0626-7 - 16.
Joubert D, Stigter JD, Molenaar J. “Assessing the role of initial conditions in the local structural identifiability of large dynamic models,” Scientific Reports, vol. 11, no. 1, Art. no. 1, 2021, doi: 10.1038/s41598-021-96293-9. - 17.
Stigter JD, van Willigenburg LG, Molenaar J. An efficient method to assess local controllability and observability for non-linear systems. IFAC-PapersOnLine. 2018; 51 (2):535-540. DOI: 10.1016/j.ifacol.2018.03.090 - 18.
Van Willigenburg LG, Stigter JD, Molenaar J. Sensitivity matrices as keys to local structural system properties of large-scale nonlinear systems. Nonlinear Dynamics. 2022; 107 (3):2599-2618. DOI: 10.1007/s11071-021-07125-4 - 19.
Van Willigenburg LG, Stigter JD, Molenaar J. Establishing local strong accessibility of large-scale nonlinear systems by replacing the lie algebraic rank condition. In: Proceedings European Control Conference. The Netherlands: Rotterdam; 2021. pp. 2645-2650 - 20.
Mir I, Taha H, Eisa SA, Maqsood A. A controllability perspective of dynamic soaring. Nonlinear Dynamics. 2018; 94 (4):2347-2362. DOI: 10.1007/s11071-018-4493-6 - 21.
Kwakernaak and Sivan. Linear Optimal Control Systems. New York: Wiley; 1972 - 22.
Hermann R, Krener A. Nonlinear controllability and observability. IEEE Transactions on Automatic Control. 1977; 22 (5):728-740. DOI: 10.1109/TAC.1977.1101601 - 23.
Saccomani MP, Audoly S, D’Angio L. Parameter identifiability of nonlinear systems: The role of initial conditions. Automatica. 2003; 39 (4):619-632. DOI: 10.1016/S0005-1098(02)00302-3 - 24.
Jean F. The car with N trailers: Characterization of the singular configurations. ESAIM. 1996; 1 :241-266. DOI: 10.1051/cocv:1996108 - 25.
Van Willigenburg LG, De Koning WL. A Kalman decomposition to detect temporal linear system structure. In: 2007 European Control Conference (ECC). Elsevier; 2007. pp. 1721-1726. DOI: 10.23919/ECC.2007.7068259 - 26.
Van Willigenburg LG, De Koning WL. Temporal linear system structure. IEEE Transactions on Automatic Control. 2008; 53 (5):1318-1323. DOI: 10.1109/TAC.2008.921033 - 27.
Van Willigenburg LG, De Koning WL. Temporal and differential stabilizability and detectability of piecewise constant rank systems. Optimal Control Applications and Methods. 2012; 33 (3):302-317. DOI: 10.1002/oca.997 - 28.
Stigter JD, Molenaar J. A fast algorithm to assess local structural identifiability. Automatica. 2015; 58 :118-124. DOI: 10.1016/j.automatica.2015.05.004