
Abstract
This chapter presents the first robust model reference adaptive control (MRAC) system for hybrid, time-varying plants affected by parametric, matched, and unmatched uncertainties as well as uncertainties in the plant’s discrete-time dynamics. This continuous-time component of this MRAC system comprises both an adaptive law and a control law that are analogous to the adaptive law and control law of classical MRAC systems. The discrete-time component of the proposed MRAC system comprises a resetting mechanism that counters the effect of resetting events in the plant dynamics. The mechanisms that guarantee robustness to unmatched uncertainties extend the well-known
Keywords
- hybrid dynamical systems
- robust model reference adaptive control
- output-feedback linearization
- uncertain systems
- quadcopters
1. Introduction
This chapter presents the first robust model reference adaptive control (MRAC) system for hybrid plants affected by parametric, matched, and unmatched uncertainties. Hybrid plants comprise dynamical models of processes that can be captured by means of both differential and difference equations. Differential equations allow describing continuous-time phenomena, whereas difference equations allow describing discrete-time phenomena. Examples of such plants include mechanical systems, whose continuous-time dynamics experience instantaneous variations due to external solicitations, elastic effects, or sudden variations in the characterizing parameters such as friction coefficients [1, 2]. Additional examples of such plants include those systems, whose dynamics are affected by continuous-time effects, both exogenous, such as disturbances, and endogenous, such as control inputs, as well as by discrete-time effects, such as decision variables drawn from a countable set of possible choices [3]. The proposed MRAC system is proven to be robust to uncertainties in both the plant’s continuous-time dynamics and in its discrete-time dynamics.
The proposed results extend the results presented in [4], which propose the first MRAC system for nonlinear hybrid plants, whose dynamics are affected by matched and parametric uncertainties, to the case wherein the plant dynamics are affected by unmatched uncertainties as well. This extension has been possible by leveraging the first generalization of the LaSalle-Yoshizawa theorem to prove the pre-attractivity of compact sets for nonlinear, time-varying, hybrid systems. Furthermore, this chapter extends for the first time classical results such as the
The application of the proposed robust hybrid MRAC system is unique and opens the way to new research ideas in the context of output-feedback linearization [8]. Indeed, the proposed adaptive control system is applied to regulate output-feedback linearized dynamical systems, whose measured output, which defines the feedback-linearizing diffeomorphism, is arbitrarily switched by the user over a countable set of alternative options. To illustrate this idea, we consider the problem of controlling a quadcopter UAV by means of an output-feedback linearizing system, which serves as a baseline controller, and a robust MRAC system to improve the tracking performance despite uncertainties and disturbances. The overwhelming literature on the control of quadcopter UAVs by means of output-feedback linearization consider only one measured output, namely, the UAV’s position and yaw angle; see [9, 10, 11] for some of the latest references on this topic of a conspicuous list. To the authors’ knowledge, alternative output functions, such as the UAV’s position and any of the other two Euler’s angles, which are commonly available for measurement using any commercial-off-the-shelf autopilot, such as those based on PX4 [12] or Ardupilot [13] to name two of the most popular ones, are not considered. The reasons for this choice substantially stem from the fact that output-feedback linearization with respect to the vehicle’s position and yaw angle only requires a non-zero total thrust at all times, which is realistic in most problems of practical interest, where free fall of the UAV is not required. Output-feedback linearization with respect to the vehicle’s position and either pitch or roll angle requires additional constraints on the vehicle’s attitude, which do not allow hovering and pose challenges in near-equilibrium maneuvers. Furthermore, most applications considered so far can be performed by simply tasking the UAV to follow some user-defined trajectory for its center of mass and some yaw angle. Indeed, onboard vision-based sensors, such as cameras or Lidars, are generally aligned with the UAV’s roll axis and quadcopter UAVs usually operate in near-hover conditions. The proposed idea of using a hybrid MRAC system to regulate the feedback-linearized equations of motion of a quadcopter UAV allows the user to arbitrarily choose the measured output and control all six of the UAV’s degrees of freedom by cycling through multiple output functions, and not only four degrees of freedom, as it occurs in existing control architectures for this class of aerial robots.
Numerical simulations prove the effectiveness of the proposed robust hybrid MRAC framework and its applicability to a variable output-feedback linearizing framework. Numerical evidence also shows how the proposed user-defined reference trajectory, yaw, pitch, and roll angles are impossible to follow without the proposed hybrid framework.
This chapter is structured as follows. In Section 2, we present the notation used in this chapter. In Section 3, we present a sufficient condition on the pre-attractivity of compact sets for nonlinear, time-varying hybrid plants. Section 4 illustrates the first key result of this chapter, namely a robust MRAC system for hybrid plants. Successively, the equations of motion of a quadcopter UAV are recalled in Section 5. Section 6 presents the second key result of this chapter, namely the application of the proposed adaptive hybrid system control framework to the feedback-linearized equations of motion of a quadcopter UAV. In Section 7, we discuss the applicability and the features of the proposed results by means of a numerical example. Finally, Section 8 draws conclusions and outlines future work directions.
2. Mathematical notation
Let
The
3. A sufficient condition on uniform pre-attractivity of compact sets
In this section, we recall elements of hybrid systems theory, which are essential to our discussion and recall the first extension of the LaSalle-Yoshizawa theorem to time-varying, nonlinear, hybrid dynamical system. Time-varying, hybrid dynamical systems can be captured by
with
The following result provides a sufficient condition for uniform boundedness and the convergence of complete solutions of (1) and (2) to a compact set. To state this result, let
Let
and if
where
4. Robust model reference adaptive control for hybrid systems
This section presents the first key contribution of this chapter, namely present the first MRAC system robust to parametric, matched, and unmatched uncertainties. Section 4.1 outlines the plant and reference model dynamics. Section 4.2 presents three robust control systems, which extend the classical
4.1 Plant and reference model dynamics
In this section, we present multiple robust MRAC schemes for nonlinear, time-varying, hybrid plants with modeling and parametric uncertainties, and uncertainties in the resetting events. To this goal, consider the
where
where
Next, consider the
where
for some
for some
4.2 Control system outline
Our goal is to derive adaptive control laws to steer the trajectories of (7) and (8) toward the trajectories of the reference model (10) and (11), despite uncertainties in the plant model. To this goal, let
denote the
and
where
and the
with
and
and if
where
where
is such that
Thus,
Next, consider the
where
where
The set of resetting events of the reference model are defined as
and
where
To improve the closed-loop trajectory tracking error dynamics at isolated time instants, consider the user-defined time instants
Rearranging the indexes of the plant’s resetting events, these user-defined resetting times will be considered resetting times of the plant, that is, we will set
4.3 Main result
The effectiveness of the control law (21) and of the three alternative adaptive laws (22)–(24) is captured by the following result. For the statement of this result, if we employ the adaptive laws (22) or (23), then let
where
Expressions for
where
are radially unbounded. Thus, following classical arguments such as those exposed in ([24], Ch. 11) or ([25], Ch. 8) for each of the adaptive laws (22)–(24), we can prove that
Next, proceeding as in the proof of Theorem 4 in [4], we can prove that Assumption 3.1 is verified by (19) and (20) and
exists and is finite. Thus, Theorem 1.1 implies that maximal solutions of (19) and (20) and of (22)–(24) are uniformly bounded in
5. Equations of motion of a quadcopter UAV
In this section, we present the equations of motion of a quadcopter UAV. To this goal, let UAV’s
Neglecting the inertial counter-torque and the gyroscopic effect [26], the UAV’s continuous-time dynamics are given by
where the rotation matrix
captures the UAV’s attitude relative to the inertial reference frame
We recall that
The
where
captures the motors’ dynamics,
where the
Quadcopter UAVs are under-actuated and, in particular, only four of their six degrees of freedom can be controlled directly [26]. In this chapter, we are interested in steering the UAV’s position and attitude along user-defined reference trajectories by controlling the UAV’s position and cyclically controlling at high frequency one of the three Euler angles
6. Output-feedback linearization of multi-rotor UAVs
In this section, we discuss the output-feedback linearization problem of the plant model given by (41)–(44) and (48). Specifically, in Sections 6.1, 6.2, and 6.3, we discuss the output-feedback linearization problem employing the UAV position and yaw angle, the UAV position and pitch angle, and the UAV position and roll angle as measured outputs, respectively. In Section 6.4, we unify the framework presented in Sections 6.1–6.3 and illustrate how the problem of controlling the output-feedback linearized dynamics can be reduced to the problem of controlling an MRAC system. In Section 6.5, which presents the key result of this chapter, we apply the MRAC framework for hybrid plants presented in Section 4 to control a multi-rotor UAV, such as a quadcopter or an X8-copter. As already remarked in Section 1, this result is groundbreaking because, thus far, the control of multi-rotor UAVs by means of output-feedback linearization allows to impose the reference trajectory for the vehicle’s position and only one of the three angles that capture its attitude.
6.1 Feedback linearization relative to position and yaw angle
To feedback-linearize (41)–(44) relative to the vehicle’s position vector and yaw angle, we set
where
and, hence,
6.2 Feedback linearization relative to position and pitch angle
By proceeding as in Section 6.1, and setting
where
and, hence,
6.3 Feedback linearization relative to position and roll angle
Setting
where
and hence,
6.4 Feedback linearization with MRAC augmentation
In light of the results in Sections 6.1–6.3, let
denote the
are Hurwitz,
and the pairs
for some
where
Fixed
where
where
captures the effect of aerodynamic forces, which are not explicitly accounted for in the feedback-linearizing control law (60). The regressor vector
Having reduced the feedback-linearized equations of motion of the UAV to the classical form or MRAC, we can compute the
where
Since
6.5 Hybrid MRAC and feedback linearization
If
The sets of resetting events
1:
2: for
3:
constraints on thrust force
4:
5:
6:
7:
8:
9:
10:
11:
12:
13:
14:
15:
16:
17:
18:
19:
20:
To present Algorithm 1, let the user-defined variable
where
denote the
7. Numerical simulation results
In this section, we illustrate the applicability of the proposed results by means of a numerical simulation. In this simulation, the UAV is tasked with ascending and moving at a constant velocity along the
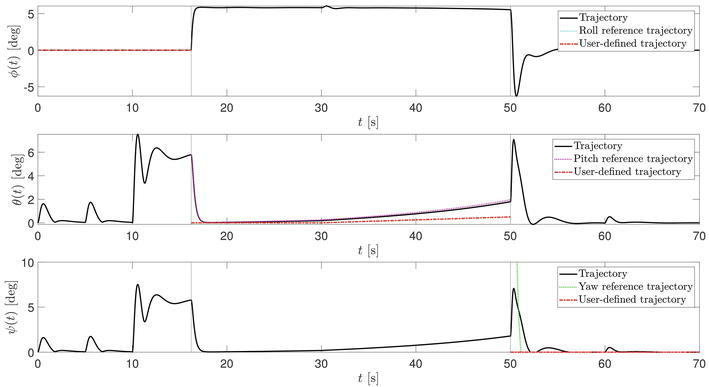
Figure 1.
Euler angles capturing the attitude of the UAV. At
Figure 2 shows the thrust force and the time derivative of the thrust force needed by the UAV to follow the user-defined trajectory. Both
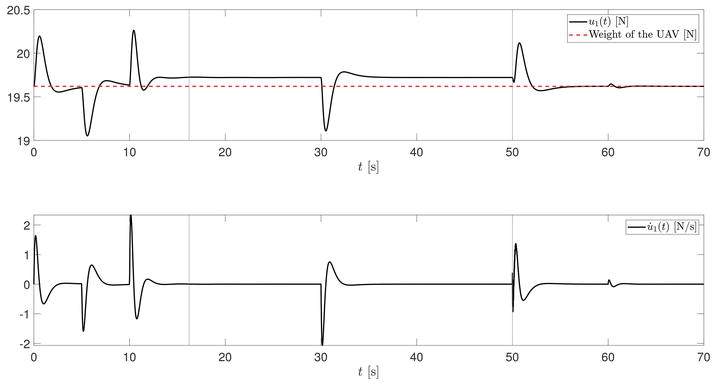
Figure 2.
Total thrust and time derivative of the total thrust. The total thrust and its derivative lie within bounds that are typical for commercial-off-the-shelf motors of Class 1 quadcopter UAVs.
In this simulation, the UAV’s mass is
and both
Figure 3 shows the UAV trajectory as a function of time. It is apparent how the UAV closely follows the reference trajectory at all times. Figure 1 shows the UAV attitude by means of the yaw, pitch, and roll angles. The reference angle as well as the user-defined angle are shown only for those stages in which the mode is active. At
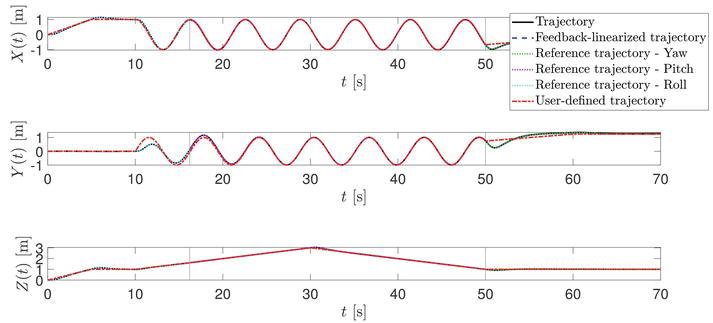
Figure 3.
Trajectory of the center of mass of the UAV as a function of time. In all modes, the vehicle’s trajectory closely follows the user-defined trajectory despite uncertainties and the drag force.
8. Conclusion
This chapter presented the first robust MRAC system applicable to time-varying, hybrid plant models affected by parametric, matched, and unmatched uncertainties in the continuous-time dynamics as well as uncertainties in the discrete-time dynamics. These results have been applied to the problem of controlling the feedback-linearized dynamics of a quadcopter UAV and tasking the vehicle to follow both a user-defined trajectory and a user-defined attitude. This result is unprecedented because, due to the UAV’s underactuation, existing works on the control of quadcopters allow regulating arbitrarily only four of its six degrees of freedom. The proposed approach, instead, allows the user to impose reference trajectories for each of the UAV’s six degrees of freedom. Future work directions concern the extension of the proposed approach from a specific application, namely quadcopter UAVs, to generic plant models.
Future work directions involve further extensions of the proposed hybrid MRAC framework for the control of output-feedback linearized systems to cases wherein the feedback-linearizing output is affected by noise. Additional work directions include problems wherein the feedback-linearizing output is not readily available for measurement but needs to be deduced from the measured output.
Acknowledgments
This research was in part performed with the support of NSF through the Grant no. 2137159 and the US Army Research Lab under Grant no. W911QX2320001.
Abbreviations
model reference adaptive control | |
unmanned aerial vehicle |
References
- 1.
Cortes J. Discontinuous dynamical systems. IEEE Control Systems Magazine. 2008; 28 (3):36-73 - 2.
Anderson RB, Marshall JA, L’Afflitto A, Dotterweich JM. Model reference adaptive control of switched dynamical systems with applications to aerial robotics. Journal of Intelligent & Robotic Systems. 2020; 100 (3):1265-1281 - 3.
Lin H, Antsaklis P. Hybrid Dynamical Systems: Fundamentals and Methods, Ser. Advanced Textbooks in Control and Signal Processing. London, UK: Springer; 2021 - 4.
L'Afflitto A. AfflittoModel reference adaptive control for nonlinear time-varying hybrid dynamical systems. International Journal of Adaptive Control and Signal Processing. 2023; 37 (8):2162-2183 - 5.
Narendra K, Annaswamy A. A new adaptive law for robust adaptation without persistent excitation. IEEE Transactions on Automatic Control. 1987; 32 (2):134-145 - 6.
Ioannou P, Kokotovic P. Adaptive Systems with Reduced Models. New York, NY: Springer; 1983 - 7.
Ioannou P, Fidan B. Adaptive Control Tutorial. Philadelphia, PA: Society for Industrial and Applied Mathematics; 2006 - 8.
Isidori A. Nonlinear Control Systems. New York, NY: Springer; 1995 - 9.
Malo Tamayo AJ, Villaseñor Rios CA, Ibarra Zannatha JM, Orozco Soto SM. Quadrotor Input-Output Linearization and Cascade Control. IFAC-PapersOnLine. 2018; 51 (13):437-442. ISSN: 2405-8963. DOI: 10.1016/j.ifacol.2018.07.317 - 10.
Lotufo MA, Colangelo L, Novara C. Control design for uav quadrotors via embedded model control. Transactions on Control Systems Technology. 2020; 28 (5):1741-1756 - 11.
Daga GD, Thosar AG. Feedback linearization of quadrotor. In: Shrivastava V, Bansal JC, Panigrahi BK, editors. Power Engineering and Intelligent Systems. Singapore: Springer; 2024. pp. 137-151 - 12.
PX4 Website. Available from: https://px4.io/ [Accessed: February 12, 2024] - 13.
Ardupilot Website. Available from: https://ardupilot.org/ [Accessed: February 12, 2024] - 14.
Kreyszig E. Introductory Functional Analysis with Applications. New York, NY: Wiley; 1989 - 15.
Bernstein DS. Matrix Mathematics: Theory, Facts, and Formulas. 2nd ed. Princeton, NJ: Princeton University Press; 2009 - 16.
Haddad WM, Chellaboina VS, Nersesov SG. Impulsive and Hybrid Dynamical Systems: Stability, Dissipativity, and Control. Princeton, NJ: Princeton; 2014 - 17.
Sanfelice RG, Goebel R, Teel AR. Generalized solutions to hybrid dynamical systems. Control, Optimisation and Calculus of Variations. 2008; 14 (4):699-724 - 18.
Bardi M, Capuzzo-Dolcetta I. Optimal Control and Viscosity Solutions of Hamilton-Jacobi-Bellman Equations. Boston, MA: Birkhäuser; 2008 - 19.
Clarke FH. Optimization and Nonsmooth Analysis. Philadelphia, PA: Society of Industrial and Applied Mathematics; 1989 - 20.
Fischer N, Kamalapurkar R, Dixon WE. LaSalle-Yoshizawa corollaries for nonsmooth systems. IEEE Transactions on Automatic Control. 2013; 58 (9):2333-2338 - 21.
Goebel R, Sanfelice R, Teel A. Hybrid Dynamical Systems: Modeling, Stability, and Robustness. Princeton University Press; 2012. Available form: http://www.jstor.org/stable/j.ctt7s02z . ISBN: 9780691153896 - 22.
Khalil HK. Nonlinear Systems. Princeton, NJ: Prentice Hall; 2002 - 23.
Pomet JB, Praly L. Adaptive nonlinear regulation: estimation from the Lyapunov equation. IEEE Transactions on Automatic Control. 1992; 37 (6):729-740 - 24.
Lavretsky E, Wise K. Robust and Adaptive Control: With Aerospace Applications. London, UK: Springer; 2012 - 25.
Ioannou P, Sun J. Robust Adaptive Control, Ser. Dover Books on Electrical Engineering Series. Upper Saddle River, NJ: Dover Publications; 2012 - 26.
L’Afflitto A, Anderson RB, Mohammadi K. An introduction to nonlinear robust control for unmanned quadrotor aircraft. IEEE Control Systems Magazine. 2018; 38 (3):102-121 - 27.
L’Afflitto A. A Mathematical Perspective on Flight Dynamics and Control. London, UK: Springer; 2017