Open Access is an initiative that aims to make scientific research freely available to all. To date our community has made over 100 million downloads. It’s based on principles of collaboration, unobstructed discovery, and, most importantly, scientific progression. As PhD students, we found it difficult to access the research we needed, so we decided to create a new Open Access publisher that levels the playing field for scientists across the world. How? By making research easy to access, and puts the academic needs of the researchers before the business interests of publishers.
We are a community of more than 103,000 authors and editors from 3,291 institutions spanning 160 countries, including Nobel Prize winners and some of the world’s most-cited researchers. Publishing on IntechOpen allows authors to earn citations and find new collaborators, meaning more people see your work not only from your own field of study, but from other related fields too.
This article explores the estimation of parameters and states for linear stochastic systems with deterministic control inputs. It introduces a novel Kalman filtering approach called Kalman Filtering with Correlated Noises Recursive Generalized Extended Least Squares (KF-CN-RGELS) algorithm, which leverages the cross-correlation between process noise and measurement noise in Kalman filtering cycles to jointly estimate both parameters and system states. The study also investigates the theoretical implications of the correlation coefficient on estimation accuracy through performance analysis involving various correlation coefficients between process and measurement noises. The research establishes a clear relationship: the accuracy of identified parameters and states is directly proportional to positive correlation coefficients. To validate the efficacy of this algorithm, a comprehensive comparison is conducted among different algorithms, including the standard Kalman filter algorithm and the augmented-state Kalman filter with correlated noises algorithm. Theoretical findings are not only presented but also exemplified through a numerical case study to provide valuable insights into practical implications. This work contributes to enhancing estimation accuracy in linear stochastic systems with deterministic control inputs, offering valuable insights for control system design and state-space modeling.
College of Engineering, Al Neelain University, Khartoum, Sudan
*Address all correspondence to: elaminkhalid32@gmail.com
1. Introduction
Finding a state-space model is crucial for designing control systems. A big part of this process involves changing the unknown parameters in a controller’s transfer function or state-space representation to get the desired stability, performance, and robustness [1]. In the field of control, system identification has been done using many different estimation methods, such as least-squares methods [2], iterative identification methods [3], Bayesian methods [4, 5], separated least-squares methods [6, 7], and maximum likelihood methods [8]. However, identifying the parameters of state-space models is more difficult. For instance, a state-space model has unknown states as well as unknown parameter matrices or vectors [9, 10]. In this area, some studies focus on identifying nonlinear state-space models [11]. Meanwhile, other studies look at how to identify linear state-space models. For example, Safarinejadian et al. [12] introduced a new way to identify a state-space model for a single input single-output fractional-order system based on a new fractional-order Kalman filter with correlated noises. To find the parameters of linear state-space models, Yu et al. [13] used the least-squares estimation framework and made the Hankel matrix factorization less affected by Markov-parameter estimation error by using a single optimization framework instead of the two-step method used by Yu et al. [14] to identify the structured system matrices. A study [8] introduced two hidden variables and used the expectation-maximization algorithm to estimate time delays and parameters in a state-space model with unknown time delay. To identify slowly changing linear time-varying systems, Razmjooei et al. [15] used a two-step method: first, they estimated parameters using Legendre basis functions, then used the Kalman filter with those estimated parameters to compute the system’s states. Industrial processes often suffer from noise in both measurements and the processes themselves, making accurate state and parameter estimation challenging. To address this, Li et al. [16] applied data filtering to mitigate the impact of colored noise in the measurement equation for bilinear state-space models. Recognizing the influence of both process and measurement noise, Cui et al. [17] leverages data filtering to mitigate the effects of colored noise, specifically within the state equations. Aiming to reduce the impact of colored noise and achieve better estimation accuracy, Wang et al. [18] proposed a novel algorithm. This approach combines filtering techniques with a recursive generalized least-squares method, utilizing filtered measurement data for continuous updates [19]. Ma et al. [20] focused on identifying state-space models in a specific form (observer canonical) while dealing with white noise affecting the output measurements. Building upon existing methods, Cui et al. [21] presented a novel algorithm for jointly estimating parameters and states in a specific class of state-space models (observer canonical) that are exposed to colored noise. This approach leverages both Kalman filtering and gradient search techniques for improved accuracy. In Cui et al. [22], researchers tackle a specific noise situation (white noise in state equations, moving average noise in measurements) by developing two algorithms for jointly estimating states and parameters in state-space systems. These algorithms rely on the “auxiliary model” concept. Motivated by the limitations of existing methods, this study investigates state-space models experiencing specific noise characteristics (white noise, moving average noise) and correlated noise behaviors, aiming to develop robust estimation algorithms for such systems. In the field of parameter and state estimation, researchers are striving to achieve both more accurate results and faster calculations. Multi-innovation identification theory tackles this challenge by utilizing more system and data information to improve parameter estimation accuracy, as shown in previous studies [23, 24, 25, 26, 27, 28]. Building upon past studies of correlated noise, this work takes a deeper dive into the specific effects of varying correlation coefficients on estimation accuracy. This knowledge will inform the development of improved estimation algorithms for state-space systems under realistic noise conditions.
This paper makes four main contributions:
The paper challenges the conventional assumption of the Kalman filter, which relies on known system parameters. It uses past estimates of the system’s parameters to predict its current state and then uses those predictions to improve the estimates of those parameters.
In the context of correlated process noise and measurement noise, the paper introduces a new formulation of the Kalman filter algorithm that preserves the fundamental assumption of Kalman filtering, which operates with uncorrelated noise.
Emphasizing the significant role of the correlation coefficient between process noise and measurement noise, the paper demonstrates that higher correlation coefficients lead to more accurate estimates.
The negative correlation coefficient reduces the estimation and identification accuracy, considering accuracy from two different perspectives: observation and model. It leads to an increase in measurement covariance and cross-covariance between state and process noise. This increase in covariance and cross-covariance affects the filtering results, leading to less accurate state estimates and parameter estimation.
This article is structured as follows. Section 2 describes the system model of a linear stochastic state-space system. Section 3 contains the formulation of the Kalman filter for handling cross-correlated noise. Section 4 presents the algorithm used for the comparative evaluation. Section 5 demonstrates the formulation of the identification model for linear stochastic state-space models. Section 6 contains the derivation of the proposed algorithm (KF-CN-RGELS). Section 7 explains the impact of negative correlation coefficients. Section 8 provides an example to verify the effectiveness of the proposed algorithm. Concluding observations can be found in Section 9.
Let us introduce some notation. The expressions “F≕X” or “X≔F”indicate that “F”is defined as “X.” The symbol “q”represents a unit back-shift operator, where q−1xt denotes xt−1. The superscript “T” denotes the transpose of vectors/matrices [29].
Consider the following linear-stochastic system:
xt+1=Fxt+Gut+wt,E1
yt=Hxt+dut+v∗t,E2
v∗t≔1+J1q−1+J2q−2+⋯+JnJq−nJvt,E3
Here, ut∈R and yt∈R are the input and output of the system, respectively. The state vector of the system is denoted as xt≔x1t…xntT∈Rn. The white noise process vt∈R has zero mean and variance σv2, and wt≔w1t…wntT∈Rn represents the white noise vector with zero mean. Jq in the unit back-shift operator q−1 is defined as Jq=1+J1q−1+J2q−2+⋯+JnJq−nJ∈R. The matrices F, G, and H representing system parameters are defined as follows:
3. Formulation of Kalman filter with noises cross-correlation
In this section, we delve into the formulation of a Kalman filter designed to address the presence of noise cross-correlation in linear stochastic state-space models. We make several key assumptions and present the mathematical derivations essential for a clear understanding of this formulation.
Assumptions: Consider a linear stochastic state-space model described by Eqs. (1) and (2). In this framework:
The sequences wt and vt are zero-mean Gaussian white noise processes.
The variance of wt at time t is represented by Qt, which is a positive definite matrix.
The variance of vt at time t is denoted as Rt, also a positive definite matrix.
These noise sequences, wt and vt, exhibit statistical correlation. Specifically, the correlation is defined by equation [30, 31]:
EwkvlT=Skδkl,,k,l=0,1,…E5
where δkl represents the Kronecker delta function, and each Skis a non-negative definite matrix.
Formulation: To effectively deal with correlated noise sequences, a gain matrix T is introduced and incorporated into the system equations. This process involves adding the gain matrix T to the measurement Eq. (2). The modified system Eq. (1) now reads:
xt+1=Fxt+Gut+wt+Tyt−Hxt−dut−JqvtE6
To simplify the representation, a noise term v∗t is defined as follows:
v∗t≔1+J1q−1+J2q−2+⋯+JnJq−nJvtE7
As a result, the modified system equation becomes:
xt+1=F−THxt+G−Tdut+Tyt+wt−Tv∗t.E8
In Eq. (8), the term Tyt represents a determined control input. To further simplify, we introduce the following notations:
F‾≔F−TH,E9
G‾≔G−Td,E10
w‾t≔wt−Tv∗tE11
With these notations, the modified system dynamics equation can be succinctly rewritten as:
xt+1=F‾xt+G‾ut+Tyt+w‾t.E12
3.1 Derivation of the gain matrix T
From Eq. (11), the mean and covariance of w‾t can be described as follows:
Ew‾t=Ewt−TEv∗t=0,E13
Ew‾tw‾Tt=Q‾.E14
Notably, we have assumed that the noises are correlated at the same time. By employing Eq. (7), we can demonstrate the relationship:
EwtvTt=Ewtv∗Tt=S.E15
Substituting Eq. (11) into (14), we obtain the following expression for Q‾:
When we multiply Eq. (11) by w‾Tt and take the expectation, we get:
Ew‾tw‾Tt=Ew‾twTt−Ew‾tv∗TtTTE18
In line with the standard Kalman filter assumptions, we assume that the new process noise, w‾t, is independent of the measurement noise v∗t, meaning Ew‾tv∗Tt=0. With this assumption, we arrive at the relationship:
Ew‾tw‾Tt=Ew‾twTt=Q‾E19
By right-multiplying Eq. (11) by wTt and taking the expected value, we can establish:
Ew‾twTt=EwtwTt−TEwTtv∗tE20
This relationship leads to the equation:
Q‾=Q−TSTE21
By subtracting Eq. (21) from (16), we can derive the following relationship:
TR−S=0,sinceT≠0E22
Hence, the gain matrix T needed to handle the uncorrelated process noise w‾t and the measurement noise v∗t can be calculated as:
T=SR−1E23
Remark 1: It is crucial to consider the new variance Q‾=Q−TST of the noise sequence w‾t. This is a critical adjustment to the model, as it departs from the variance Q of the noise sequence wt.
3.2 Kalman filter prediction and correction cycles
At this point, we focus on the system dynamics equation and the measurement equation, which are given in Eqs. (24)–(25):
xt+1=F‾xt+G‾ut+Tyt+w‾tE24
yt=Hxt+dut+v∗tE25
The prediction and correction cycles of the modified Kalman filter for this proposed system are as follows:
Prediction cycle
For xpt representing the prediction state, the prediction cycle equations are:
xpt+1=F¯xpt+G‾ut+TytE26
Pp=F‾PpF‾T+Q‾E27
K=PpHTHPpHT+R−1E28
Here, K and Pp represent the Kalman gain and the estimation error covariance, respectively.
Correction cycle
For xct be the corrected state or the estimated state, the correction cycle equations will be as follows.
xct+1=xpt+1+Kv∗tE29
(where) v∗t=yt−c∗xt−d∗ut
The estimated error covariance is calculated as:
Pc=In−KHPp,E30
Eqs. (26)–(30) describe the prediction and correction cycles of the Kalman filtering process when dealing with correlated noise sequences.
4. Introduction and formulation of Kalman filtering algorithms for comparative assessment
In this section, we introduce and formulate two Kalman filtering algorithms for the purpose of conducting a comprehensive comparative analysis with the proposed algorithm. The algorithms to be compared are the standard Kalman filter (SKF) and the State Augmented Kalman Filter with Correlated Noises (AUG-KF). Each of these algorithms is presented with its assumptions and key equations for prediction and correction cycles [32, 33, 34].
4.1 Standard Kalman filter (SKF)
Consider the system model described by Eqs. (1)–(2)
Assumptions: The process noise (wt) and measurement noise (vt) are independent.
Formulation: Prediction and Correction Cycles
Prediction cycle
Predicted state: xpt+1=Fxpt+Gut
Prediction error covariance: Pp=FPpFT+Q
Kalman gain: K=PpHTHPpHT+R−1
Correction cycle
Corrected state: xct+1=xpt+1+Kv∗t, Where v∗t=yt−c∗xt−d∗ut.
Correction error covariance: Pc=Pp−KPpHTT
4.2 Augmented-State Kalman filter (AUG-KF)
State augmentation is a technique to extend the state vector of a system by adding some auxiliary variables that are related to the original state or the noise. In [35], the authors augment the state vector by appending the process noise vector, so that the cross-correlated noises can be treated as independent noises in the augmented system. This technique can simplify the filter design and improve the estimation accuracy, but it also increases the dimension of the state vector and the computational cost of the filter. With reference to method used in [35] we can derive the AUG-KF algorithm for the system (1)–(2) as
Assumptions: The process noise (wt) and measurement noise (vt) are correlated with Ewtv∗tT=S represents the cross-covariance between process noise wt and measurement noise v∗t.
Formulation: Initialization, Prediction and Update Cycles:
Initialization:
nt=yt−Hxt−dut−J1vt−1−J2vt−2, where nt is the actual observation.
Augmented Kalman Gains:
ka=kxkw, where kx=PHTHPpHT+R−1, kw=SHPpHT+R−1.
Update process noise and state estimate:
wt=kwnt, xpt+1=Fxpt+Gut+wt.
Ppt+1=FPptFT+Pw+FPxw+PwxFT
Update covariance matrix of augmented state and process noise:
PAug=PctPxwPwxPw, where Pct=Ppt+1−kxHPpt+1HT+R−1kxT,
Pw=Q−kwHPctHT+R−1kwT, Pwx=−kwHPctHT+R−1kxT
And Pxw=−kxHPctHT+R−1kwT.
Update for the next time step:
Corrected state:
xct+1=xpt+1+kxnt,
Correction error covariance:
Pct+1=Pct−kxHPctHT+R−1kxT.
These algorithms will form the foundation for a comparative analysis in the following sections. We will assess their performance and effectiveness in managing noise correlations, comparing them to the proposed algorithm. This evaluation aims to identify the most effective approach in various scenarios.
5. The identification model for linear stochastic system
Let us define some essential notation:
“In” denotes an identity matrix of appropriate size, typically n×n.
“1n” represents an n-dimensional column vector with all elements equal to unity.
“θ̂t “represents the estimate of θ at time t, and “x̂t” denotes the estimate of xt.
Now, based on Section 3, we modify the system equations:
xt+1=F¯xt+G¯ut+Tyt+w¯tE31
yt=Hxt+dut+v∗tE32
With
v∗t≔1+J1q−1+J2q−2+⋯+JnJq−nJvt
F‾≔F−TH, w‾t≔wt−Tv∗t.
The system’s input and output are represented by ut∈R and yt∈R, respectively, with xt≔x1t…xntT∈Rn represents the system state vector. vt∈R is a white noise process with zero mean and variance σv2, and wt≔w1t…wntT∈Rn denotes the white noise vector with zero mean. The polynomial Jq in the unit back-shift operator q−1 is expressed as Jq=1+J1q−1+J2q−2+⋯+JnJq−nJ∈R. We also have system parameters: F∈Rn×n,G∈Rn,H∈R1×n and d∈R
Assuming that yt,ut,wt, and vt are strictly proper, meaning their values are zero for 0 for t≤0, and that the orders n and nJ are known, we can derive the following state equations from (1)–(3):
Eq. (43) represents the identification model for a linear stochastic state-space system as defined in (1)–(2). The main objective of this paper is to present an algorithm that jointly estimates the system states and unknown parameters using recursive generalized extended least squares. Additionally, we aim to investigate the impact of correlations between process and measurement noises on estimation accuracy.
Remark 2: To simplify the identification process, the observable general state-space system described in (1)–(2) is transformed into the observer canonical form. This transformation serves to reduce the number of parameters that need to be identified, making the estimation process more efficient and accurate.
This section introduces the KF-CN-RGELS algorithm for the joint estimation of system parameters and states in a canonical observer state-space system (Eqs. 1 and 2). The algorithm comprises two key components: the parameter estimation algorithm and the state estimation algorithm. These algorithms are developed to address the challenge of estimating parameters and states in the proposed system, and when combined, they provide a comprehensive solution.
6.1 The parameter estimation algorithm
The parameter estimation algorithm is centered around minimizing the quadratic criterion function defined as:
Cθ≔∑j=1Lyj−φjTθ−γj−βj2,E44
This minimization process helps estimate the system parameters based on the identification model (Eq. 43) using the least-squares principle [22]. The parameter estimation is performed recursively, and it can be expressed as follows:
θ̂t=θ̂t−1+Ltyt−γt−βt−φtTθ̂t−1E45
Lt=Pt−1φt1+φtTPt−1φtE46
Pt=Pt−1−LtPt−1φtT,P0=p0InE47
However, in implementing these algorithms, certain challenges arise due to unknown process and measurement noise sequences, as well as unmeasurable states. To address these challenges, the concept of auxiliary models is introduced to replace unknown parameters and states with their estimates. In this modified parameter estimation algorithm, φ̂t and γ̂t are used instead of φt and γt, resulting in the following algorithm [22]:
θ̂t=θ̂t−1+Ltyt−γ̂t−βt−φ̂tTθ̂t−1E48
Lt=Pt−1φ̂t1+φ̂tTPt−1φ̂tE49
Pt=Pt−1−LtPt−1φ̂tT,P0=p0InE50
The vectors ϕ̂vt, γ̂t and βt are formed using the output, the process noise, and measurement noise sequences, which are calculated using the equations provided.
To form ϕ̂vt in φ̂t and γ̂t,ŵt−i and, v̂t−i can be calculated using (1) and (2) as
w‾̂t=x̂t+1−F‾̂tx̂t−G‾̂tut−Tcxt+d̂utE51
v∗̂t=yt−Hx̂t−d̂tut,E52
v̂t=v∗̂t−J1̂v̂t−1−J2̂v̂t−2E53
6.2 The state estimation algorithm
This section deals with the problem of estimating non-measurable states of the information vector φt. To overcome this challenge, a modified Kalman filter prediction and update cycle, described in Section 4, is used to estimate the system state. The state estimation depends on the degree of correlation between process noise and measurement noise in the proposed system. The state estimation algorithm is as follows:
Prediction cycle:
xpt+1=F‾̂xpt+G¯̂ut+Tyt;E54
P=F‾̂PF‾̂T+Q−T̂ŜTE55
Calculation of Kalman gain:
K=Pc/cPcT+R̂E56
Correction cycle:
xt+1=xpt+1++Kv∗̂tE57
P=eyen−KcPE58
In these equations, F‾=F−TH,Q‾=Q−TST and S=ρw,vRQ, as stated in Section 4. Therefore,
x̂t=xctE59
where xpt and xct are predicted and corrected states at time t, (respectively)
Remark 3: A Kalman filter estimates the state of a system, assuming that its parameters are known. To overcome this issue, the concept of an auxiliary model that replaces all system parameters with estimates in the prediction and correction cycles of the modified Kalman filter recursion equations, as illustrated in (55)–(60), is applied.
6.3 The joint parameter and state estimation algorithm
The joint parameter and state estimation algorithm combines the parameter estimation and state estimation algorithms to recursively estimate both the system’s parameter vector and state vector. The algorithm is described by the following equations:
θ̂t=θ̂t−1+Ltyt−γ̂t−βt−φ̂tTθ̂t−1E60
Lt=Pt−1φ̂t1+φ̂tTPt−1φ̂tE61
Pt=Pt−1−LtPt−1φ̂tT,P0=p0InE62
φ̂t=∅̂f¯tT∅gtTut∅̂vtTT∈Rns,E63
∅̂ft≔−x̂1t−1−x̂1t−2…−x̂1t−nT∈RnE64
∅bt≔ut−1ut−2…ut−nT∈RnE65
∅̂vt≔v̂t−1v̂t−2…v̂t−nJT∈RnJE66
γ̂t=w¯̂t−1+w¯̂t−2+⋯+w¯̂t−n,E67
βt≔T1yt−1+T2yt−2+⋯+Tnyt−nE68
F‾̂≔f‾̂1f‾̂2…f‾̂nT∈RnE69
θ̂≔F‾̂TG¯̂Td̂ĴTT∈Rns,ns=2n+1+nJE70
xpt+1=F‾̂xpt+G¯̂ut+TytE71
P=F‾̂∗P∗F‾̂T+Q−T̂∗ŜTE72
K=P∗c/c∗P∗cT+R̂E73
xt+1=xpt+1++Kv∗̂tE74
P=eyen−Kc∗PE75
v∗̂t=yt−Hx̂t−d̂tut,E76
v̂t=v∗̂t−J1̂v̂t−1−J2̂v̂t−2E77
ŵt=x̂t+1−F‾̂tx̂t−G‾̂tut−Tcxt+d̂utE78
w¯̂t=ŵt−Tv∗̂tE79
x̂1t=x1t.E80
Now, our target system is the system described by Eq. (1)–(2)
Finally, we extract the system parameter estimates as:
θestimated≔F̂TĜTd̂ĴTT∈Rns,ns=2n+1+nJ,
Remark 4: The KF-CN-RGELS algorithm demonstrates the utility of using correlation coefficients to obtain state estimates and improve the accuracy of parameter estimation. This innovative approach is pivotal in achieving accurate system estimation in cases where parameters and states are not entirely known.
7. The impact of negative correlation coefficients ρwv on state estimation accuracy
In this section, we address the impact of negative correlation coefficients on estimation accuracy. We have studied this effect by examining its influence on two fundamental factors: observation accuracy and process model accuracy.
7.1 Observation accuracy
To commence our exploration of observation accuracy, let us examine the model and measurement equations under the assumptions F=I,H=1, and ut=0 in Eqs. (31) and (32). This examination leads us to the following relationship:
yt=yt−1+v∗t+w‾t−1+v∗t−1E81
Considering the variance of yt, we can express it as:
From (82), The measurement covariance Pyt in term of the noise covariances Q¯t, Rt, and St can be equivalently written as
Pyt=Pyt−1+Q‾t−1+Rt−1−2St−1E83
For uncorrelated noises, i.e., St=0, the equation becomes:
P0yt=Pyt−1+Q‾t−1+Rt−1E84
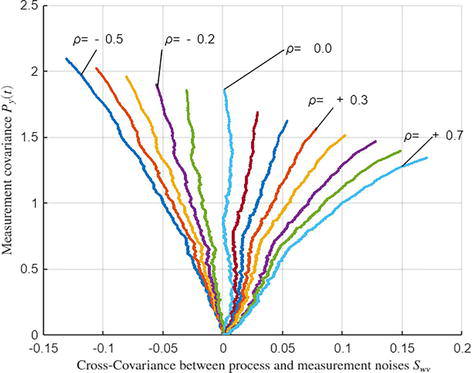
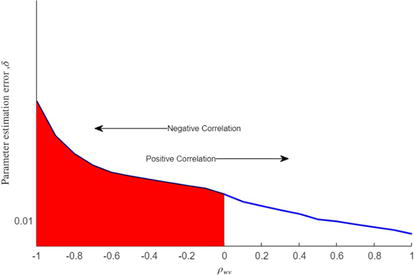
According to (83) and (84), if St>0, then Pyt<P0yt indicates that the observation at time t becomes more accurate when a positive correlation coefficient exists at time t−1. Conversely, if St<0 the observation at time t becomes less accurate. It is worth noting that ρw,v=S/QR. Figure 1 below shows the measurement covariance Pyt versus positive and negative values of the cross-covariance between process and measurement noises, St. The data obtained correspond to illustrative example 1.
Figure 1.
Noise cross-covariance, S versus measurement covariance Pyt for different values of correlation coefficient ρw,v.
7.2 Process model accuracy
Turning to process model accuracy, we aim to derive the cross-covariance between the state and the process noise, defined as:
Pŵk∣kx̂k∣k=E[(wk−ŵk∣K)xk−x̂k∣kTE85
Before we delve into the derivation, we rely on a lemma known as the Conditional Gaussian Distribution Lemma presented in Ref. [36], which proves to be invaluable.
Lemma 1: Suppose a pair of vectors Y and X are jointly Gaussian with a mean vector mΓ and a covariance matrix PΓΓ, then X is conditionally Gaussian on Y with a conditional mean vector mX∣Y and a conditional covariance matrix PX∣Y.
With this lemma, we can set:
Γ=YX=ykwk=Hxk+vkwk, these yields
mΓ=ŷk∣k−1ŵk∣k−1=Hx̂k∣k−10 And PΓΓ=PykykPykwkPwkykPwkwk
Where Pykyk is the measurement prediction covariance, HPx̂k∣k−1x̂k∣k−1HT, and Pwkyk is the cross-covariance between process and measurement noise, S.
Hence, we can express:
PΓΓ=HPx̂k∣k−1x̂k∣k−1HTSTSQ
Leveraging Lemma 1, we derive the conditional mean and covariance of the process noise.
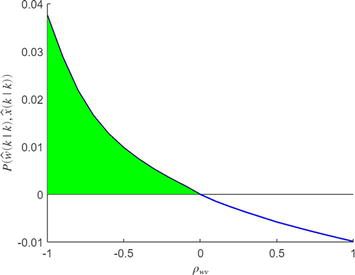
The results presented in Eq. (88) highlight the role of the cross-covariance between the state and process noise in the context of the correlation coefficient. The correlation coefficient can be both positive or negative values and significantly impacts this cross-covariance. When the correlation coefficient is positive, increasing its value reduces the cross-covariance between the state and process noise. Conversely, when the correlation coefficient is negative, increasing its value elevates the cross-covariance between the state and process noise. Table 1 and Figure 2 further illustrate this outcome. The data obtained corresponds to illustrative example 1.
ρw,v
−0.7
−0.5
−0.3
0
0.3
0.5
0.7
Tr [Pŵk∣k,x̂k∣k]
0.0166
0.0097
0.0052
−0.0001
−0.0038
−0.0059
−0.0076
Table 1.
Correlation coefficient ρw,v versus trace of cross-covariance Pŵk∣kx̂k∣k between state and process noise.
Figure 2.
Correlation coefficient ρw,v versus trace of cross-covariance Pŵk∣kx̂k∣k between state and process noise.
For reliable models, choosing system parameters must guarantee stability (avoiding unbounded oscillations), controllability (being able to reach any desired state), and observability (knowing the internal state from measurable outputs).
In the simulation, the input ut is a pseudo-random binary sequence generated by the MATLAB function u= idinput 6553511, prbs’ ′01−0.8,1, w1t and w2t are random noise sequences with zero mean and variance σw12=0.072, and σw22=0.012 respectively. vt is a random noise sequence with zero mean and variance σv2=0.82. Set the data length L= 5000 and choose different values of the correlation coefficient ρw,v in the range [0–1]. Generate system parameter and state estimates by applying the KF-CNRGELS algorithm with different values of correlation coefficient, ρw,v and examine the correlation coefficient effect.
To facilitate simulation, the generation of correlated process and measurement noises involves creating a correlation matrix. This matrix is then applied to eigen decomposition, giving rise to a correlating filter that captures the interdependencies within the noise components.
The parameters estimates and errors δθ=∥θ̂−θ∥/∥θ∥ at ρw,v=0.5,0.6, and 0.9 are summarized in Table 2.
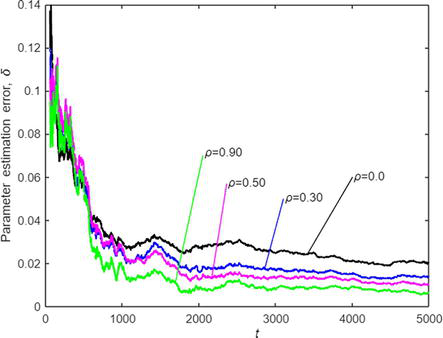
In Figure 3, we vary the correlation coefficient ρw,v and plot the resulting parameter estimation errors. The plot shows three curves corresponding to correlation coefficients of 0, 0.5, and 0.9.
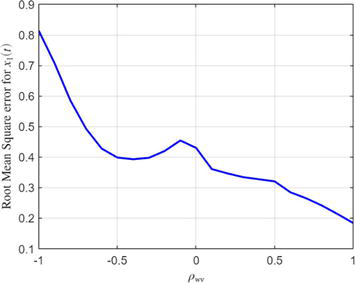
The root-mean-squared error of the state estimate x1 for ρw,v in the range − 1.0 to +1.0 is shown in Figure 4. Figure 5 shows the relationship between the parameter estimation error and various values of the correlation coefficient ρw,v positive and negative values. Figure 6 shows the parameter estimation error of the proposed algorithm compared to the standard Kalman filter SKF and Augmented-State Kalman filter algorithms for ρw,v=0.6. Tables 3 and 4 illustrate the results of the comparison between the KF-CN-GELS and AUG-KF for ρw,v=0.0, the KF-CN-GELS and AUG-KF for ρw,v=0.4 and the KF-CN-GELS and AUG-KF for ρw,v=0.8. The noise estimates v̂t,w1̂t and w2̂t for KF-CN-GELS with ρw,v=0.7 is shown in Figure 7. The state estimates of x1tand x2t and errors for ρw,v=0.7 are depicted in Figure 8. The collected input and output data are shown in Figure 9.
ρw,v
t
f1
f2
g1
g2
d
J1
J2
δθ%
0.5
5000
−0.0402
−0.3557
2.0117
3.0165
1.3191
0.0580
0.0398
1.0491
0.6
5000
−0.0396
−0.3557
2.0110
3.0173
1.3185
0.0587
0.0345
0.9696
0.9
5000
0.0416
−0.3545
2.0098
3.0148
1.3120
0.0470
0.0201
0.6354
True values
0.0500
−0.3500
2.0000
3.0000
1.3000
0.0505
0.0139
Table 2.
The KF-CN-RGELS estimates and errors ρw,v=0.5,0.6, and 0.9 for Rv=0.8Qw=0.07,0.01I2.
Figure 3.
The KF-CN-RGELS parameter estimation error δθ. Against tρw,v=0,0.3,0.5, and 0.9, and Rv=0.8Qw=0.07,0.01I2..
Figure 4.
Root mean square error (RMSE) for x1t versus different values of correlation coefficient ρw,v.
Figure 5.
The parameter estimation error δθ against ρw,v=−1to+1,Rv=0.15Qw=0.07,0.01I2.
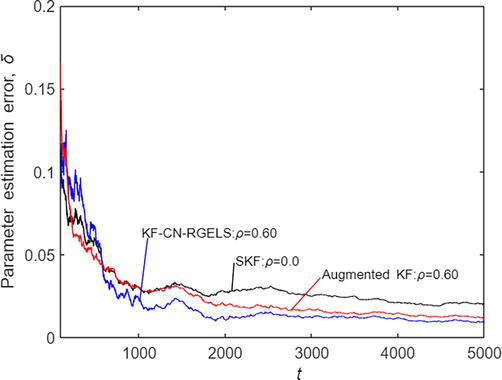
Figure 6.
The KF-CN-RGELS estimation error δθ against t compared to SKF and augmented KF algorithms ρw,v=0.60 for Rv=0.8,Qw=0.07,0.01I2.
ρw,v=0
t
f1
f2
g1
g2
d
J1
J2
δθ%
SKF
5000
−0.0521
−0.3461
2.0186
3.0047
1.3108
0.0967
0.0732
2.0386
AUG-KF
5000
−0.0522
−0.3461
2.0186
3.0047
1.3108
0.0967
0.0732
2.0389
KF-CN-RGELS
5000
−0.0524
−0.3464
2.0190
3.0052
1.3108
0.0958
0.0727
2.0177
True values
0.0500
−0.3500
2.0000
3.0000
1.3000
0.0505
0.0139
Table 3.
The parameter estimates and errors (KF-CN-RGELS, SKF, and AUG-KF) for ρwv=0.0Rv=0.8Qw=0.07,0.01I2.
Algorithms
KF-CN-RGELS (ρwv=0.4)
AUG-KF (ρwv=0.4)
KF-CN-RGELS (ρwv=0.6)
AUG-KF (ρwv=0.6)
KF-CN-RGELS (ρwv=0.8)
AUG-KF (ρwv=0.8)
f1= −0.0500
−0.0388
−0.0413
−0.0396
−0.0446
−0.0408
−0.0515
f2= −0.3500
−0.3553
−0.3537
−0.3557
−0.3511
−0.3549
−0.3456
g1= 2.0000
2.0098
2.0103
2.0110
2.0091
2.0101
2.0090
g2= 3.0000
3.0164
3.0132
3.0173
3.0080
3.0158
2.9971
d= 1.3000
1.3221
1.3218
1.3185
1.3193
1.3146
1.3170
J1= 0.0505
0.0698
0.0740
0.0587
0.0570
0.0500
0.2615
J2= 0.0139
0.0452
0.0580
0.0345
0.0537
0.0256
0.1422
δθ%
1.2622
1.5008
0.9696
1.2109
0.7413
6.4351
Table 4.
The parameter estimates and errors (KF-CN-RGELS and AUG-KF) for Rv=0.8Qw=0.07,0.01I2.
Figure 7.
The estimates of w2t,w2t, and vt for KF-CN-GELS and AUG-KF ρw,v=0.7 for Rv=0.8Qw=0.07,0.01I2.
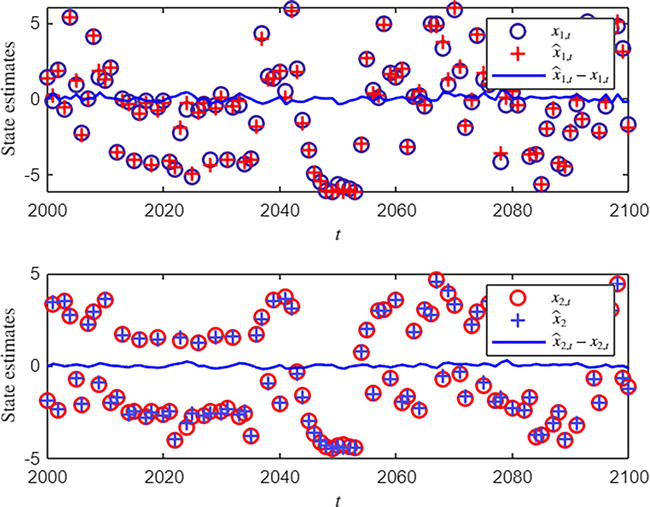
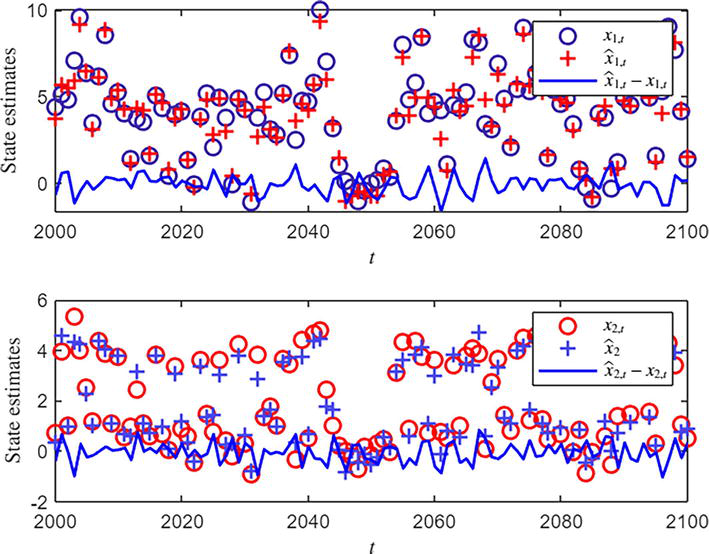
Figure 8.
The true state, estimated state, and state estimation error used in example 1, ρw,v=0.70.
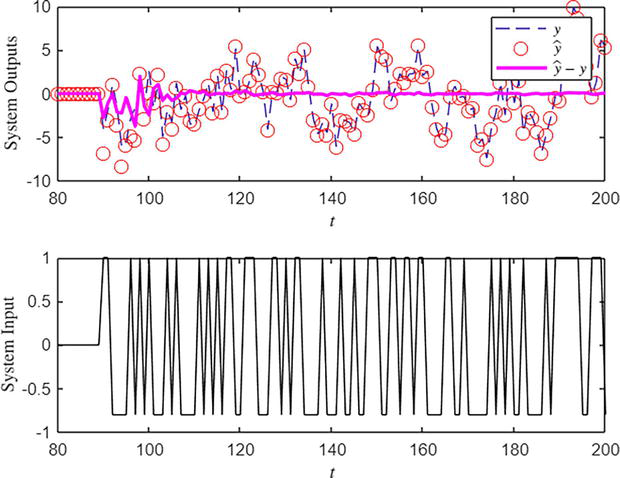
Figure 9.
The input ut and output yt collected data used in example 1ρw,v=0.70.
Looking at Tables 2–4 and Figures 3–9, we can draw some conclusions from these tables and figures.
At ρw,v=0, there is no correlation between process noise and measurement noise. The filtering result of the standard Kalman filter is the same as the filtering result of the KF-CN-RGELS and the AUG-KF algorithms, as illustrated in Table 3.
The best estimate of the state is obtained when the correlation coefficient ρw,v between the process noise and the measurement noise increases. This is reflected in the improved accuracy of the parameter estimates presented by the KF-CN-RGELS algorithm. See Figure 4 and Table 2.
Clearly, the KF-CN-RGELS algorithm yields more accurate parameter estimates, since the correlation coefficient ρw,v increases in the positive direction, and the mean-square error of the estimated states decreases. See Figures 4 and 5 and Table 2.
We find that the KF-CN-RGELS algorithm provides better parameter estimation accuracy than the SKF and AUG-KF algorithms under the same conditions, which makes this algorithm efficient and robust. See Figure 6 and Table 4.
The KF-CN-GELS algorithm provides better estimates of the process and measurement noises. w1t, w2t, and vt than the AUG-KF algorithms under the same conditions. Figure 7 shows these results.
Example 2. Consider the state-space model for a simple two-tank system, where ut is the inlet water flow, x1t and x2t are the water levels of two tank, yt is measurement of water level of tank 1 as shown in Figure 10. The state-space model of this system includes process and measurement noises:
Figure 10.
The two-tank schematic diagram used in example 2.
x1t+1x2t+1=0.1110.150x1tx2t+1.91.6ut+ω1tω2t
yt=10x1tx2t+1.9ut+1+0.1069q−1−0.0143q−2vt
The parameter vector to be identified is given by:
In the case of correlated noises, we define the system noise matrix as
U=QSSTR,
From the code for ρwv=0.95,U=0.58740.48130.97980.48130.39470.79990.97980.79991.7013
The theoretical value of S is: S=ρwvQR=0.95×0.60.4×1.6=0.93080.7600, which is approximately ≈U13U23.
During simulation, the input and output data that are collected from a pseudo-random binary sequence denoted by ut and the water level measurement of tank1yt=x1t are shown in Figure 10, w1t and w2t are white noise sequences with zero mean and variances σw12=0.602 and σw22=0.402 respectively. vt is a white noise sequence with zero mean and variance σv2=1.602.Set the data length L=5000. Apply the KF-CN-RGELS algorithm to identify this two-tank model. To test the performance of the algorithm, different values of correlation coefficient (positive and negative values) are used for the system, and the simulation results are displayed in Tables 5–8 and Figure 11.
ρw,v
t
f1
f2
g1
g2
d
J1
J2
δθ%
0.53
5000
−0.1293
−0.1322
1.8892
1.5373
1.9070
0.1536
−0.0914
3.6241
0.75
5000
−0.0960
−0.1591
1.8915
1.6051
1.9030
0.1263
−0.0990
2.8425
True values
−0.1100
−0.1500
1.9000
1.6000
1.9000
0.1069
−0.0143
Table 5.
The KF-CN-RGELS estimates and errors ρw,v=0.53and 0.75 for Rv=1.6Qw=0.6,0.4I2.
ρw,v=0
t
f1
f2
g1
g2
d
J1
J2
δθ%
SKF
5000
−0.1213
−0.1418
1.8904
1.5702
1.9004
0.3480
0.0832
8.3683
AUG-KF
5000
−0.1216
−0.1418
1.8903
1.5693
1.9003
0.3360
0.0721
7.8924
KF-CN-RGELS
5000
−0.1221
−0.1413
1.8901
1.5676
1.9003
0.3301
0.0607
7.6053
True values
−0.1100
−0.1500
1.9000
1.6000
1.9000
0.1069
−0.0143
Table 6.
The parameter estimates and errors (KF-CN-RGELS, SKF, and AUG-KF) for ρwv=0.0Rv=1.6Qw=0.6,0.4I2.
Algorithms
KF-CN-RGELS (ρwv=0.3)
AUG-KF (ρwv=0.3)
KF-CN-RGELS (ρwv=0.5)
AUG-KF (ρwv=0.5)
KF-CN-RGELS (ρwv=0.7)
AUG-KF (ρwv=0.7)
f1 = −0.1100
−0.1487
−0.1242
−0.1336
−0.0997
−0.1019
−0.0932
f2 = −0.1500
−0.1181
−0.1424
−0.1286
−0.1588
−0.1546
−0.1600
g1 = 1.9000
1.8897
1.9012
1.8888
1.8969
1.8914
1.8957
g2= 1.6000
1.5047
1.5695
1.5286
1.6083
1.5934
1.6161
d = 1.9000
1.9103
1.9097
1.9076
1.9062
1.9037
1.9057
J1 = 0.1069
0.2016
0.3822
0.1586
0.2400
0.1316
0.2045
J2 = −0.0143
−0.0409
0.1490
−0.0871
0.0201
−0.1004
−0.0001
δθ%
4.6767
10.2745
3.8111
4.4205
2.8971
3.2575
Table 7.
The parameter estimates and errors (KF-CN-RGELS and AUG-KF) for Rv=1.6Qw=0.6,0.4I2.
Algorithms
t
f1
f2
g1
g2
d
J1
J2
δθ%
KF−CN−RGELSρwv=−0.5
5000
−0.0241
−0.1249
1.9996
1.8662
1.9901
0.4607
0.3575
19.1496
AUG−KFρwv=−0.5
5000
−0.1245
−0.1432
1.8957
1.5831
1.8937
0.3581
0.0998
8.8369
True values
−0.1100
−0.1500
1.9000
1.6000
1.9000
0.1069
−0.0143
Table 8.
The parameter estimates and errors (KF-CN-RGELS and AUG-KF) for negative values of correlation coefficient ρwv=−0.5Rv=1.6Qw=0.6,0.4I2.
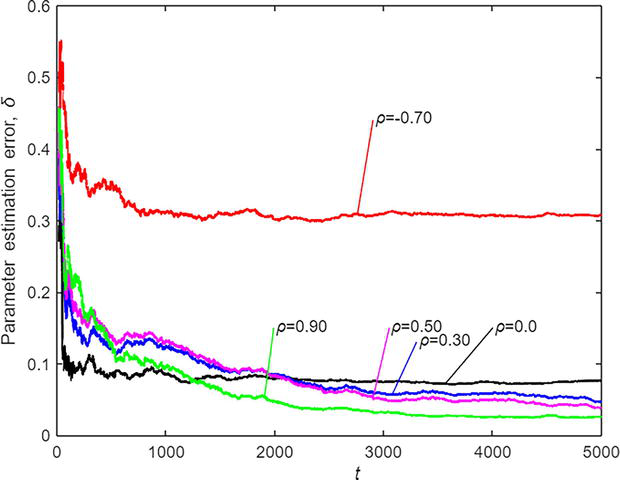
Figure 11.
The KF-CN-RGELS parameter estimation error δθ.
When choosing the correlation coefficient for the simulation, it is important to make sure that the noise matrix U above is positive semidefinite, which means that all its eigenvalues are positive and the eigenvectors are orthogonal.
Concentrating on Tables 5–8 and Figures 11–14, we can draw some conclusions from the table and figures.
The parameter estimation errors produced by the KF-CN-RGELS algorithm decrease as the correlation coefficient increases in the positive direction. See Figure 11 and Table 5.
Under the same data length and the same correlation coefficient ρwv the KF-CN-RGELS algorithm has a faster convergence rate than the SKF and AUG-KF algorithms – see Figure 12 and Tables 6 and 7.
When the correlation coefficient is negative, the model and observations are less accurate. This affects the accuracy of the state estimation, which in turn affects the accuracy of the parameter estimation – see Table 8 and Figure 11 refer to Section 7 for details).
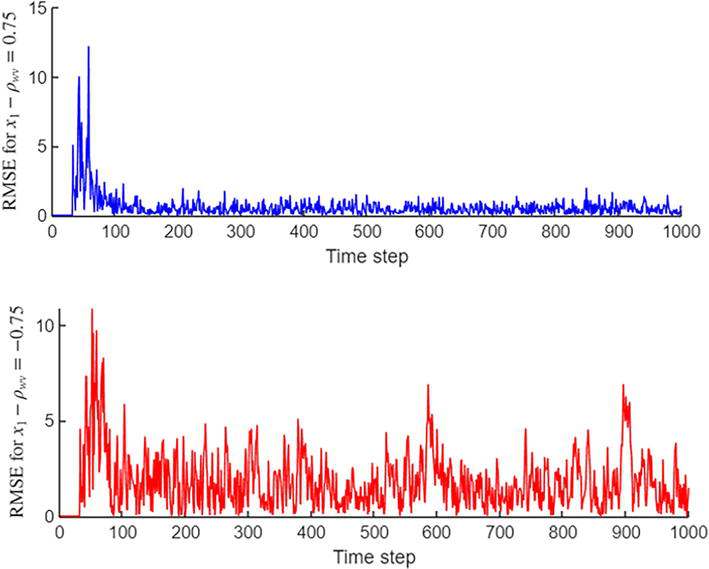
The type of correlation between the process and measurement noises (increasing positively or negatively) affects the root mean-quare error of the system state. A highly positive correlation reduces the root mean square error, whereas a highly negative correlation increases the root mean square error of system states; see Figure 13.
Figure 12.
The KF-CN-RGELS estimation error δθ against t compared to SKF.
Figure 13.
The root mean square error of the state x1 versus time.
Figure 14.
The true state, estimated state and state estimation error used in example 1, for KF−CN−RGELSρw,v=0.75−0.75 for Rv=1.6Qw=0.6,0.4I2ρw,v=0.75.
Against tρw,v=00.30.5, 0.9, and − 0.7, for Rv=1.6Qw=0.6,0.4I2 and Augmented KF algorithms ρw,v=0.65 for Rv=1.6Qw=0.6,0.4I2
The papers in this issue propose the KF-CN-RGELS algorithm to solve the combined state and parameter estimation problem in stochastic linear state-space systems perturbed by correlated processes and measurement noise. In this study, a known degree of correlation between measurement noise and process noise was theoretically predefined. To estimate the state of the system, the values of the correlation coefficients were chosen based on the considered real-time application situation. We developed a variant of the Kalman filter that considers noise correlations by adjusting the process noise matrix. Simulations show this new approach is successful, improving parameter estimation accuracy as noise correlation becomes more positive. The effectiveness of the proposed algorithm was tested theoretically by selecting several values for the positive and negative correlation coefficient. A negative correlation coefficient can have negative effects on the accuracy of both observations and models. It causes the measurements to be less reliable and introduces more uncertainty in determining the relationship between the observed data and the underlying process. This uncertainty, in turn, affects the filtering process that is used to estimate the true state and parameters from the observed data. As a result, the state and parameter estimates become less accurate. Many researchers in literature provide efficient ways to estimate the covariance matrices Q, R, and S that will be used in future work to guarantee best practice results. By estimating these matrices, the optimal correlation coefficient can be practically chosen, and according to Eq. (42), the algorithm gives satisfactory results from a practical point of view. Beyond its application to linear stochastic systems with KF-CN-RGELS, this approach opens doors to developing novel algorithms and tackling the identification of more complex systems like bilinear ones. Furthermore, the proposed KFCN-RGELS can be used to study real-time applications such as aircraft radar guidance systems, which is the case for cross-correlated noise systems.
1.Tewari A. Modern Control Design with MATLAB and SIMULINK. Vol. 1. Chichester: Wiley; 2002
2.Mu B, Bai E-W, Zheng WX, Zhu Q. A globally consistent nonlinear least squares estimator for identification of nonlinear rational systems. Automatica. 2017;77:322-335
3.Ding F, Xu L, Meng D, Jin XB, Alsaedi A, Hayat T. Gradient estimation algorithms for the parameter identification of bilinear systems using the auxiliary model. Journal of Computational and Applied Mathematics. 2020;369:112575
4.Krishnanathan K, Anderson SR, Billings SA, Kadirkamanathan V. Computational system identification of continuous-time nonlinear systems using approximate Bayesian computation. International Journal of Systems Science. 2016;47(15):3537-3544
5.Pan W, Yuan Y, Gonsalves J, Stan G-B. A sparse Bayesian approach to the identification of nonlinear state-space systems. IEEE Transactions on Automatic Control. 2015;61(1):182-187
6.Gan M, Chen CLP, Chen G-Y, Chen L. On some separated algorithms for separable nonlinear least squares problems. IEEE Transactions on Cybernetics. 2017;48(10):2866-2874
7.Gan M, Li H-X. An efficient variable projection formulation for separable nonlinear least squares problems. IEEE Transactions on Cybernetics. 2013;44(5):707-711
8.Gu Y, Liu J, Li X, Chou Y, Ji Y. State space model identification of multirate processes with time-delay using the expectation maximization. Journal of the Franklin Institute. 2019;356(3):1623-1639
9.Li B. State estimation with partially observed inputs: A unified Kalman filtering approach. Automatica. 2013;49(3):816-820
10.Gil P, Henriques J, Cardoso A, Dourado A. On affine state-space neural networks for system identification: Global stability conditions and complexity management. Control Engineering Practice. 2013;21(4):518-529
11.Zhang X et al. Combined state and parameter estimation for a bilinear state space system with moving average noise. Journal of the Franklin Institute. 2018;355(6):3079-3103
12.Safarinejadian B, Asad M, Sadeghi MS. Simultaneous state estimation and parameter identification in linear fractional order systems using colored measurement noise. International Journal of Control. 2016;89(11):2277-2296
13.Yu C, Ljung L, Wills A, Verhaegen M. Constrained subspace method for the identification of structured state-space models (COSMOS). IEEE Transactions on Automatic Control. 2019;65(10):4201-4214
14.Yu C, Ljung L, Verhaegen M. Identification of structured state-space models. Automatica. 2018;90:54-61
15.Razmjooei H, Safarinejadian B. A novel algorithm for hierarchical state and parameter estimation in slowly time varying systems. Journal of Advanced and Applied Sciences (JAAS). 2015;3(5):189-200
16.Li M, Liu X, Ding F. The filtering-based maximum likelihood iterative estimation algorithms for a special class of nonlinear systems with autoregressive moving average noise using the hierarchical identification principle. International Journal of Adaptive Control and Signal Processing. 2019;33(7):1189-1211
17.Cui T, Ding F, Alsaedi A, Hayat T. Data filtering-based parameter and state estimation algorithms for state-space systems disturbed by colored noises. International Journal of Systems Science. 2020;51(9):1669-1684
18.Wang X, Ding F, Alsaedi A, Hayat T. Filtering based parameter estimation for observer canonical state space systems with colored noise. Journal of the Franklin Institute. 2017;354(1):593-609
19.Wang Y, Ding F. Filtering-based iterative identification for multivariable systems. IET Control Theory & Applications. 2016;10(8):894-902
20.Ma X, Ding F. Gradient-based parameter identification algorithms for observer canonical state space systems using state estimates. Circuits, Systems, and Signal Processing. 2015;34(5):1697-1709
21.Cui T, Ding F, Li X, Hayat T. Kalman filtering based gradient estimation algorithms for observer canonical state-space systems with moving average noises. Journal of the Franklin Institute. 2019;356(10):5485-5502
22.Cui T, Ding F, Jin X-B, Alsaedi A, Hayat T. Joint multi-innovation recursive extended least squares parameter and state estimation for a class of state-space systems. International Journal of Control, Automation and Systems. 2020;18(6):14121424
23.Xu L, Ding F. Parameter estimation algorithms for dynamical response signals based on the multi-innovation theory and the hierarchical principle. IET Signal Processing. 2017;11(2):228-237
24.Baker RC, Charlie B. Nonlinear unstable systems. International Journal of Control. 1989;23(4):123-145
25.Xu R, Ding F. Parameter estimation for control systems based on impulse responses. International Journal of Control, Automation and Systems. 2017;15(6):2471-2479
26.Zhang X, Ding F. Adaptive parameter estimation for a general dynamical system with unknown states. International Journal of Robust and Nonlinear Control. 2020;30(4):1351-1372
27.Zhang X, Ding F. Hierarchical parameter and state estimation for bilinear systems. International Journal of Systems Science. 2020;51(2):275-290
28.Zhang X, Ding F. Recursive parameter estimation and its convergence for bilinear systems. IET Control Theory & Applications. 2020;14(5):677-688
29.ElAmin H, El Mageed KA. Clustering input signals based identification algorithms for two-input single-output models with autoregressive moving average noises. Complexity. 2020;2020:1-12
30.Elamin KAEMH. State estimation on correlated noise and unit time-delay systems. In: 2016 Conference of Basic Sciences and Engineering Studies (SGCAC). Khartoum, Sudan; 2016. pp. 94-100
31.Elamin KAEMH, Taha MFE. On the steady-state error covariance matrix of Kalman filtering with intermittent observations in the presence of correlated noises at the same time. In: 2013 International Conference on Computing, Electrical and Electronic Engineering (ICCEEE). Khartoum, Sudan; 2013. pp. 15-22
32.Jiang P, Zhou J, Zhu Y. Globally optimal Kalman filtering with finite-time correlated noises. In: 49th IEEE Conference on Decision and Control (CDC). Atlanta, GA, USA; 2010. pp. 5007-5012
33.Wang X, Liang Y, Pan Q, Yang F. A Gaussian approximation recursive filter for nonlinear systems with correlated noises. Automatica. 2012;48(9):2290-2297
34.Wang X, Liang Y, Pan Q, Wang Z. General equivalence between two kinds of noisecorrelation filters. Automatica. 2014;50(12):3316-3318
35.Chang G. Alternative formulation of the Kalman filter for correlated process and observation noise. IET Science, Measurement & Technology. 2014;8(5):310-318
36.Chang G. Marginal unscented Kalman filter for cross-correlated process and observation noise at the same epoch. IET Radar, Sonar and Navigation. 2014;8(1):54-64
Written By
Abd El Mageed Hag Elamin Khalid
Submitted: 10 January 2024Reviewed: 04 February 2024Published: 12 April 2024