Open Access is an initiative that aims to make scientific research freely available to all. To date our community has made over 100 million downloads. It’s based on principles of collaboration, unobstructed discovery, and, most importantly, scientific progression. As PhD students, we found it difficult to access the research we needed, so we decided to create a new Open Access publisher that levels the playing field for scientists across the world. How? By making research easy to access, and puts the academic needs of the researchers before the business interests of publishers.
We are a community of more than 103,000 authors and editors from 3,291 institutions spanning 160 countries, including Nobel Prize winners and some of the world’s most-cited researchers. Publishing on IntechOpen allows authors to earn citations and find new collaborators, meaning more people see your work not only from your own field of study, but from other related fields too.
To purchase hard copies of this book, please contact the representative in India:
CBS Publishers & Distributors Pvt. Ltd.
www.cbspd.com
|
customercare@cbspd.com
Shape memory alloys (SMAs) have been established in a wide range of applications. Lead by the medical sector, nickel-titanium-based alloys are used for the realization of stents, guide wires, and other medical or surgical equipment. Besides this field, where mainly the superelastic material characteristics are used, first products based on actuation via the shape memory effect have been introduced to the market. These shape memory actuators or actuator systems either use temperature change directly for the realization of work output, for example, in thermostat valves, or are thermally activated by an applied electric current. This chapter gives an overview of recent SMA-based actuator systems and applications in a variety of fields from industry over bionics to automotive and aerospace.
Center for Mechatronics and Automation Technology (ZeMA), Saarland University, Saarbruecken, Germany
Gianluca Rizzello
Saarland University, Saarbruecken, Germany
*Address all correspondence to: paul.motzki@uni-saarland.de
1. Introduction
Thermal shape memory alloys are materials that can undergo a reversible phase transformation between a high-temperature phase austenite and a low-temperature phase martensite. Geometrical changes occurring during this phase transformation are associated with high forces, so that these materials are capable of performing mechanical work. This chapter is oriented on the chapter “Thermische Formgedächtnislegierungen” in the German book publication “Smart Materials” [1].
The first documented observations of the shape memory effect date back to 1932, when the Swedish physicist Arne Ölander discovered a “rubbery” behavior of an Au-47.5Cd alloy [2]. The term “shape memory effect” (SME) was first introduced by Chang and Read in 1951 [3, 4]. In 1963, the U.S. Naval Ordinance Laboratory published the first studies of the SME in binary nickel-titanium alloys [5]. Nickel-titanium alloys, also known as “nitinol,” NiTi or Ni-Ti, represent the most popular shape memory alloy (SMA) nowadays due to their attractive mechanical properties and corrosion resistance [6, 7]. In the medical sector, the so-called “superelastic” SMAs are widely used, but also in the field of small actuator systems and microactuators, SMA-based applications see a rapidly growing interest [8, 9].
The thermal SME describes the ability of a material to “remember” its original shape and to return to this initial shape after severe deformation by a reversible phase transformation [10, 11, 12]. This effect is mainly observed in metallic alloys, but also occasionally in ceramics (e.g., ZrO2) and polymers (e.g., PTFE) [13].
The two prominent phases martensite and austenite occurring in thermal SMAs only denote a microstructure type and do not allow any conclusion on the chemical composition of the material. In this context, martensite refers to a crystalline structure formed only by shear distortion of the lattice and not by diffusion. This shear distortion is called martensitic transformation (MT). Since the atomic bonds are not broken during MT, the local chemical composition remains unchanged [14]. To initiate MT, the austenite phase must be destabilized. This can be done by increasing the stress or reducing the temperature. The resulting thermodynamic imbalance forces a shear distortion, while the volume of the cell remains constant [15]. In the case of temperature-induced martensite formation in a stress-free state, the change in shape is negligible. Consequently, the local distortions are opposite, so that the macroscopic effect cancels out. The martensitic crystals of different orientation are called variants. If two variants face each other, they are called twins. Under the influence of mechanical stress, the boundaries of the twins shift, with some variants aligning along the mechanical stress field. This unbalances the random variant distribution and preferential variants are formed. This process is called de-twinning and results in a macroscopic shape change. As a result, a shape memory alloy can have three different microstructural states: Austenite (Aus), twinned martensite, and de-twinned martensite.
The popular nickel-titanium alloy has a body-centered cubic crystal lattice in its austenitic phase. In contrast, the lattice in martensite is monoclinic. The two possible orientations of this monoclinic structure in twinned martensite are also referred to as martensite plus (M+) and martensite minus (M−).
2.1 One-way effect
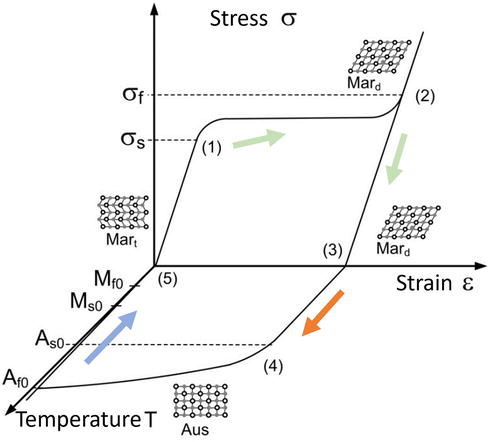
A body made of a shape memory alloy has the identical shape in the stress-free state after cooling as in austenite. However, the martensitic microstructure shows a comparatively large yielding due to the movable twin boundaries (Figure 1). When the stress reaches σs (1), the martensite variants begin to align in the direction of the force. When the stress reaches σf, all variants are aligned in the direction of force and the martensite is in a completely de-twinned form (2). Further loading of the material leads to further elastic deformation until the yield point is reached. When the material is unloaded, it remains in the de-twinned state and retains a macroscopic change in shape (3). Since this change in shape is due to the movement of twin boundaries and not to lattice defects, this behavior is referred to as pseudoplasticity. The temperature-induced martensitic transformation starts when the austenite start temperature (As0) is reached (4). Since the martensitic transformation is fully reversible, the distortion state of the de-twinned martensite is equalized by the resulting austenitic microstructure. The original orientation of the martensite variants is irrelevant. As a result, the shape change applied during de-twinning is completely reset (one-way effect). The material returns to its original shape, it has a shape memory. This state is reached when the temperature rises to the value of the austenite finish temperature (Af0). In the interval between As0 < T < Af0, part of the thermal energy supplied is converted into mechanical work. This part can be used in actuators. However, to enable cyclic activation, the material must undergo a renewed martensitic transformation. This transformation requires a driving temperature difference and starts at Ms0. The value of this temperature difference depends on the alloy and is between 20 and 40 K for common SMAs. The cause of the hysteresis is the friction between the twin boundaries.
Figure 1.
Schematic of the one-way effect in a σ(ε, T) diagram according to Ref. [15].
2.2 Two-way effect
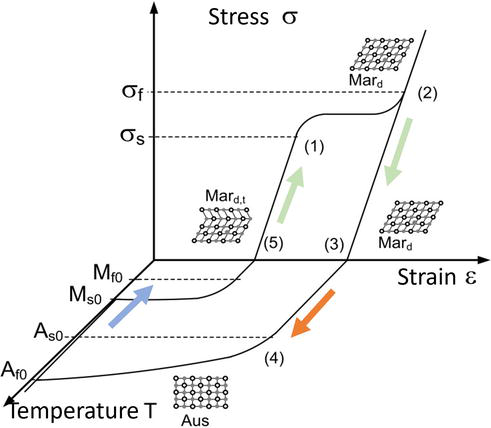
Both the manufacturing process (cold drawing) and repeated thermo-mechanical cycling can specifically generate internal stresses in the material. The cause of these internal stresses are dislocations and precipitations resulting from the thermo-mechanical stress. As a result, the transformation of austenite into martensite (cooling) leads to the formation of martensite variants that are energetically favorably oriented to the internal stresses. This means that no twin structure is formed in the microstructure during the transformation, but the material transforms directly into de-twinned martensite [16]. Macroscopically, this means that a change in shape also occurs during cooling. The material changes between a low-temperature form and a high-temperature form. The so-called intrinsic two-way effect is thus triggered by exclusively thermally induced phase transformations. The schematic representation of the two-way effect can be found in Figure 2.
Figure 2.
Schematic of the intrinsic two-way effect in a σ(ε, T) diagram according to Ref. [15].
The microstructural defects already occur at thermo-mechanical loads during normal actuator operation of the SMA [17]. This means that in a shape memory actuator, the so-called training effect sets in during the first cycles. As a result, there is a change in the stress-strain behavior as well as the formation of a two-way effect. Therefore, it is necessary to cycle the material sufficiently before characterization or before using it as actuator material [18]. After a sufficient number of load cycles, a stable state develops.
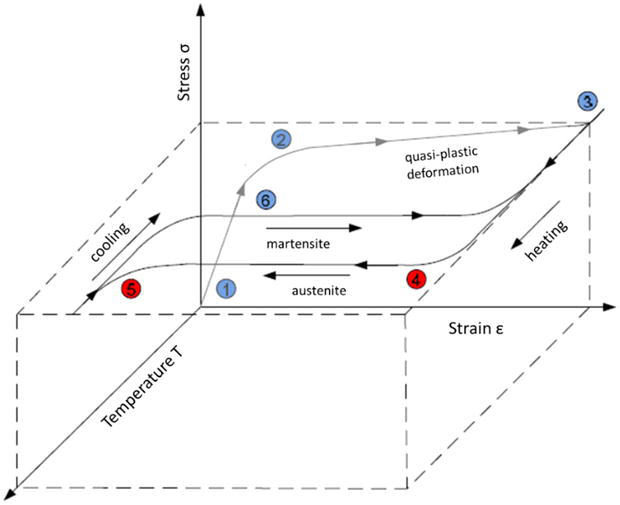
The extrinsic two-way effect can be described as a continuous repetition of the one-way effect. Here, an external load, such as a mass or a spring, ensures that the SMA material is always deformed back to its martensitic phase. Thus, heating and cooling generate a transformation between two defined states in the respective phase (Figure 3).
Figure 3.
Schematic of the extrinsic two-way effect in a σ(ε, T) diagram according to Ref. [18].
At point (1), the SMA is in twinned martensite. An external load leads first to an elastic deformation (2) and then, due to de-twinning in the martensite, to a “quasi- or pseudoplastic” deformation in point (3). If the material is now heated, the transformation to austenite begins at point (4) and is completed at initial strain at point (5). On subsequent cooling, the material returns directly to the de-twinned state at point (3) due to the external load, so that repeated setting of states (3) and (5) is possible by thermal activation and cooling. This effect is primarily used in actuator technology.
In order to use the shape memory effect in actuator systems, the material must undergo the temperature induces phase transformation to austenite from a deformed martensitic state. Here, the temperature of the material is the external control variable. While the mechanical stress results according to the mechanical boundary condition, the displacement depends on how much the material was de-twinned before activation. To use the maximum strain, the preload of the actuator must be greater than the stress required for complete de-twinning. If this condition cannot be met by the load to be moved, a restoring element is necessary. Here, the mechanical spring in particular has become established in practical applications. This offers the advantage of a simple design, a system integration that is usually easy to represent, and automatic resetting as soon as the temperature drops below the martensite start temperature. However, if a position is to be maintained with such an actuator system, the SMA material must permanently have a temperature above martensite start temperature. To overcome this problem, various approaches are being investigated in current research, such as the use of a second, antagonistically arranged actuator element. Due to the flat course in the pseudoplastic region, at least theoretically the possibility of an energy-free holding of the position arises.
When operating an SMA actuator, it is possible to move to any intermediate position in its working range. This can only be done by a controlled partial phase transformation. This means that in a defined temperature interval, specific temperatures are approached and kept constant.
The generally high-operating material stresses make SMs the actuator mechanism with the highest energy density of any known technology [19, 20, 21]. This means that very high forces can be generated with only a small amount of material, which in turn can lead to very compact and lightweight actuator systems. Typical energy densities are in the order of 107 J/m3 [22]. The strokes that can be generated are also comparatively high with typically 3–5% for NiTi actuator materials [23, 24, 25]. The limiting design parameter for SMA actuators is usually the switching frequency, which is determined by the thermal cooling behavior of the SMA element, and thus rarely exceeds an order of 10 Hz. In addition, the temperature range in the application must be considered, as today’s commercial alloys have phase transition temperatures in the 90°C range. At ambient temperatures in this range, it therefore becomes difficult to further utilize the actuator properties.
In most SMA actuator system developments today, the focus is on the design of tensile loaded SMA wire actuators. Wire actuators are usually activated by means of electrical current through the inherent resistance of the shape memory material. In addition to wire actuators, there are also SMA springs, tubes, bundles and other designs, often specifically developed for applications [26, 27, 28, 29].
3.1 SMA actuator system design
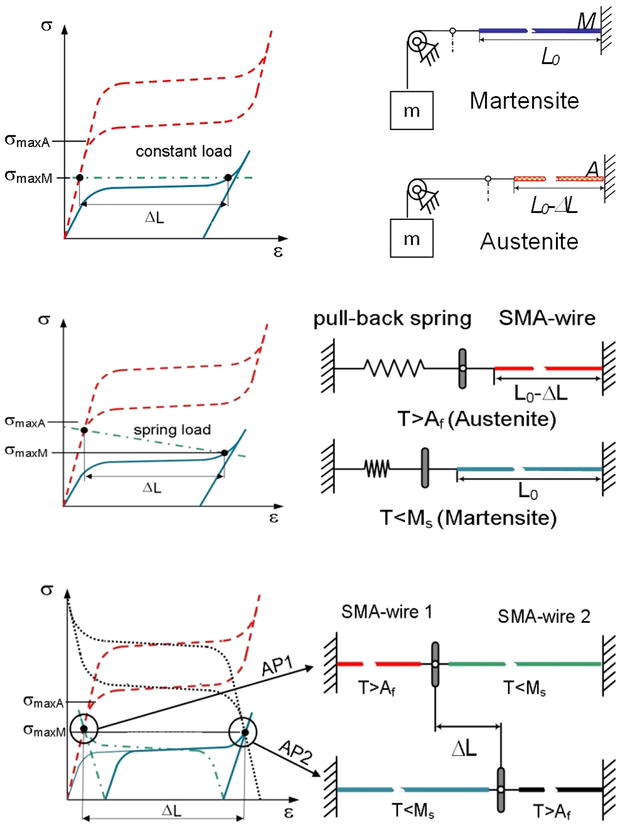
As described above, the realization of SMA actuators requires loads or preload elements that, if possible, return the SMA actuator to its fully de-twinned initial state upon cooling. Using a wire actuator as an example, three common actuator systems are presented: constant load, linear spring load, and antagonistic actuators.
In the simplest case, the actuator is reset by a constant load (e.g., a mass). Figure 4 (upper part) shows the mechanical principle schematically [30]. The cold SMA wire is stretched in the martensitic state by the mass up to the corresponding mechanical stress level. Heating of the wire leads to phase transformation and the associated contraction of the wire. In the stress-strain diagram, the constant load now intersects the red austenite curve. Cooling again leads to elongation of the SMA wire.
Figure 4.
SMA wire actuator systems with different preload and resetting principles: Constant load (upper part), linear spring load (center part), and antagonistic SMA wires (lower part) [30].
In case of a linear spring used as a restoring element (Figure 4, center part), the mechanical stress increases when the SMA wire is activated, and the stroke is also slightly lower compared to the constant load system due to the Young’s modulus in the austenite.
Compared to the wire-spring configuration, antagonistic SMA wires only use up the necessary material stress to remain at a certain operating point (Figure 4, lower part). In addition, energy-free (no electrical current flow) holding of positions up to a certain stress level is possible in this system.
3.2 Energy-efficient SMA actuator systems
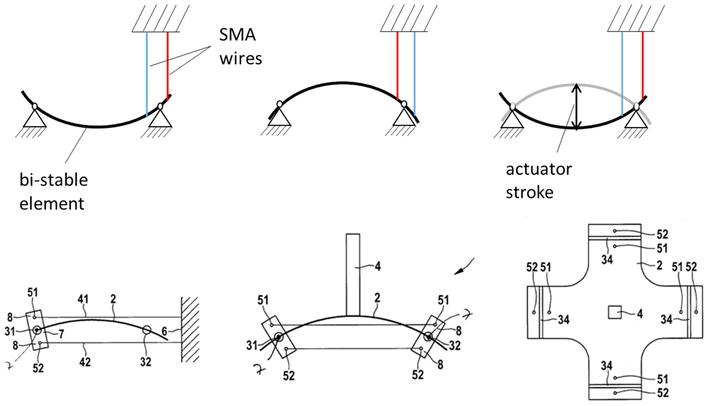
With a focus on energy-efficiency, a possible approach is to couple SMA wires with bistable elements (springs) [31, 32, 33, 34]. This results in a switching bistable actuator (Figure 5), which is held in its two end positions solely by the stiffness of the bistable element, leading to better energy-efficiency compared to conventional SMA actuators. In addition, the mechanical design allows more space-efficient solutions to be realized and even actuator strokes to be significantly increased.
Figure 5.
Various exemplary configurations of bistable springs and SMA wires [31, 32, 33, 34].
Another possibility to increase the performance of SMA actuators and also to operate them more energy-efficiently is via control strategy. The electrical activation of SMA elements usually takes place in the low-voltage range. A certain amount of energy, dependent on the total SMA mass, is required for heating to the phase transition temperature and then a specific amount of latent heat for the phase transformation itself. Ideally, SMA actuators are “adiabatically” activated, meaning that no energy is lost to the environment during the activation or heating interval. Electrical power therefore plays a significant role. With targeted energy quantity delivery, SMA actuators can therefore be operated at high voltages and power levels. This type of activation strategy is studied and explained in detail in Refs. [35, 36, 37, 38]. In these investigations, switching times in the lower millisecond range were demonstrated at electrical voltages in the 100 V range, for example, as well as energy savings of up to 80% compared to conventional electrical activation.
In the following, an overview of realized SMA actuators in prototype stage and commercial applications is given. A distinction is made between switching systems, closed-loop controlled systems, and energy-autonomous systems. In principle, a large number of SMA actuators are known today. The focus of this section is on systems, which are preferably close to series production or available on the market and which prove the potential of SMA due to their successful assertion on the market. A comprehensive overview of SMA actuator systems is presented in Ref. [9].
4.1 Switching systems
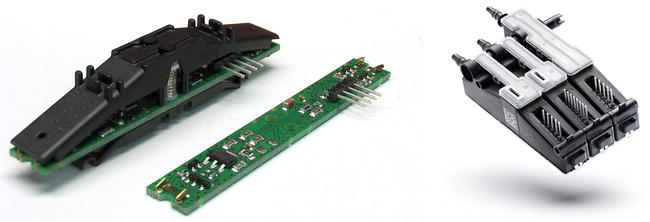
Switching systems use the shape memory effect to realize two defined switching states. In most cases, such systems are designed as wire-spring arrangements, with the SMA elements activated either by externally applied thermal energy or by electrical current. Although switching actuators have a low potential for possible functional integration into systems and can only be adapted to the individual requirements of an application to a limited extent compared to controlled or energy-autonomous systems, there are nevertheless immense advantages to be gained from their use. In addition to the reduction of installation space, mass, and complexity, the silent operation can also be an important trait. Established applications for switching actuators can be found in valve technology, among others. This includes thermally activated valves in cooling circuits (automotive) or in coffee machines, water valves with scald protection [39, 40], but also electrically activated valves for pneumatic applications. Particularly noteworthy in this context are the SMA valve for thermal management from Ingpuls GmbH, and the 3/3-way valve for controlling the massage function in passenger car seats developed by Actuator Solutions GmbH—a joint venture of the companies Alfmeier Präzision AG and SAES Getters (Figure 6) [41]. Ingpuls generally acts as a material, component, and system manufacturer and has already equipped more than 5 million vehicles with actuators in thermal management. In addition to the automotive industry, the company also serves other sectors such as aerospace, medical technology, and household appliances.
Figure 6.
Pneumatic SMA valve from actuator solution GmbH [41, 42].
Actuator Solutions’ electrically activated valves have a total mass of less than 20 g. In these valves, spring-loaded SMA wires in a V arrangement are energized to switch two plungers with a stroke of 0.4 mm at a force of 0.8 N between two end positions completely silently. The small cross section of the FGL wires used, 76–100 μm, permits low activation currents and thus comparatively low energy consumption. The market launch took place in 2005 with an annual volume of 150,000 units. Since then, the market volume increased to around 15 million units per year by 2015. Production of the valves is fully automated.
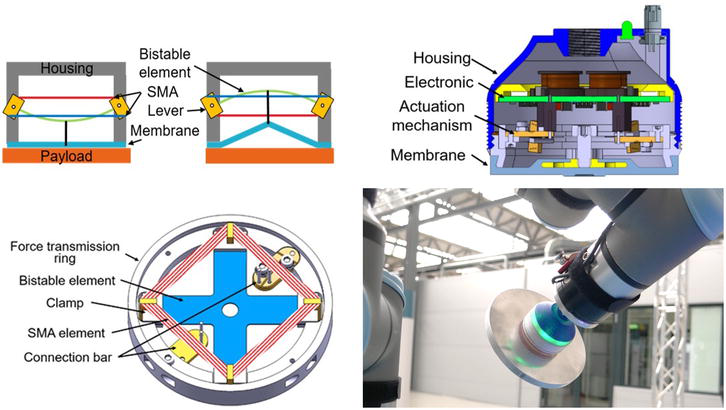
An application example for a bistable switching system with SMA wires is a bistable vacuum suction cup for material handling [43]. The actuator system consists of a bistable spring in cross form and two antagonistic bundles of SMA wires, which are attached to the rotationally mounted spring element via small levers (Figure 7). Alternating activation of the wire bundles moves a flexible membrane from a flat to a deformed state and back again. As in a suction cup, this can be used to grip structurally rigid, flat components.
Figure 7.
Schematic operation and design and assembly of the SMA-based vacuum gripper [43].
4.2 Controlled systems
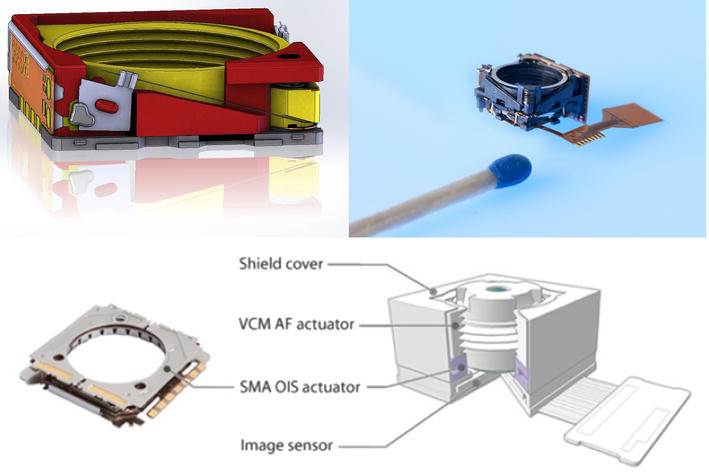
In order to position accurately with SMA actuators, closed-loop control is necessary. Compared to purely switching actuators, closed-loop systems are significantly more complex, since they must have additional sensors and a control device. So far, two systems from the field of optics have established themselves on the market in which closed-loop controlled SMA actuators are used. In many smartphone cameras, two systems are integrated with which the lens is finely positioned. On the one hand, AF (Auto Focus) enables optimally focused images through translational positioning. Secondly, OIS (Optical Image Stabilization) compensates for low-frequency vibrations caused by hand movements through tilting the lens in two degrees of freedom. This achieves better image quality, especially in low-light conditions. While the AF function can be realized conventionally by comparatively simple voice coil drives, the forces achievable by the coils are too low for the implementation of OIS systems. Due to their extraordinary energy density, SMAs are predestined to implement such functions in the smallest installation space with significantly lower weight. Figure 8 upper part shows an SMA-based AF system. A spring-loaded wire in a V arrangement, which is crimped to the housing, is heated with electric current (red) and then contracts, lifting the spring-loaded lens carrier. The position is detected indirectly by measuring and evaluating the electrical resistance of the wire.
Figure 8.
SMA-based AF (upper part) and OIS (lower part) actuators in smart phone camera systems [44].
In OIS systems, two actuators in a V arrangement are required to realize the two tilting degrees of freedom. The comparatively small stroke or tilt angle thus allows the very flat design shown in Figure 8 lower part. This makes it possible to arrange the SMA-based OIS under conventional AF systems without increasing the installation space. The control and position measurement of the two actuators can also be performed here indirectly via the measurement of the electrical resistance of the SMA wires.
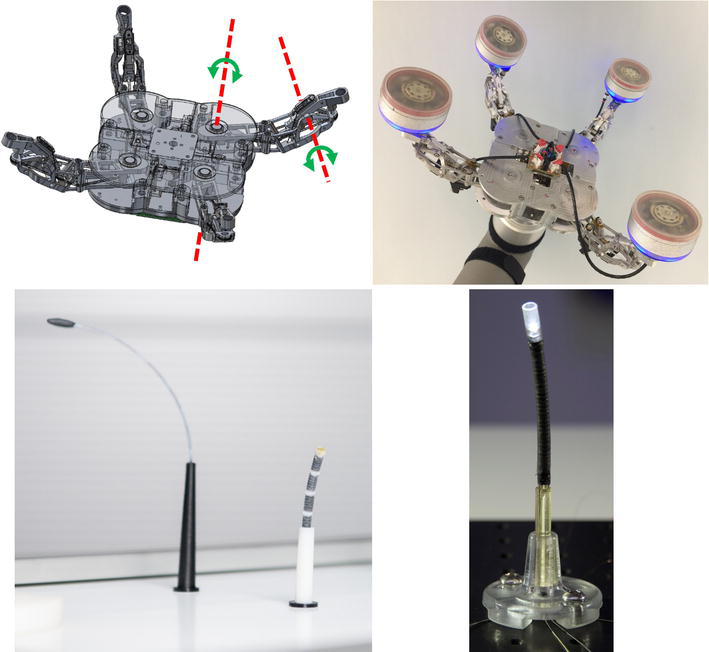
In the industrial field of handling technology, an adaptive end-effector has been developed in combination with the vacuum grippers already mentioned [45] All four gripper arms can be positioned independently of each other in a position-controlled manner. Thereby, each gripper arm has the possibility to rotate up to 90° in plane, as well as to tilt up to 30° out of plane (Figure 9, upper part). These degrees of freedom enable the handling of various component geometries in production without having to replace the specific end-effectors required for this purpose. SMA wires are attractive in this case primarily because of their light weight, as additional electrical or pneumatic actuators would introduce a non-economic increase in inertial mass.
Figure 9.
SMA-based end-effector (upper part) [45] and SMA soft continuum robotic structures (lower part) [46, 47] (photo: Oliver Dietze).
Another current research field in which SMA actuators are gaining relevance is continuum robotics. Inspired by elephant trunks, tentacles, or snakes in nature, robotic structures are being developed without discrete mechanical joints [48, 49]. SMA wires are suitable as manipulators for robotic structures, for example, in the medical field in endoscopes, guide wires or catheters. Figure 9 lower part shows three different designs of such continuum robots. Lower part right shows an endoscopic camera system for the inspection of complex components. By actively controlling the tip of the endoscope on which the camera modules sit, aircraft turbines or turbochargers, for example, can be inspected from the inside for material defects or damage.
4.3 Energy-autonomous systems
While switching and controlled SMA actuators always require an external energy supply and control or regulation components, energy-autonomous SMA actuators are characterized by the fact that they are activated by the surrounding medium. Actuator, sensor, and control functions are realized solely by the SMA material. This allows a very high degree of simplicity and functional integration, but requires multidisciplinary knowledge in material science, thermodynamics, design, and control engineering to develop such systems. Several applications are known from the state-of-the-art technique. These range from thermostatic valves and valves for compensation of viscosity differences to mechanical engineering components for compensation of thermally induced bias losses [50].
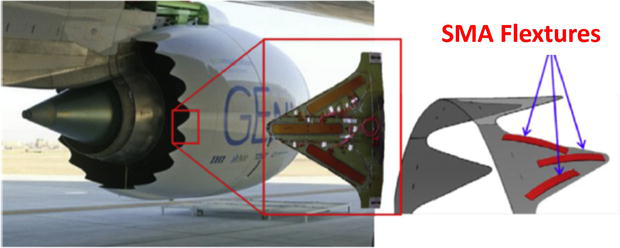
Another application from the aerospace sector, which is characterized by particularly high functional integration, is described in Refs. [51, 52]. This system, which can be found in the literature as a VGC (variable geometry chevron), solves the conflict between low noise emissions during takeoff and landing and high efficiency at cruising speed. At the outlet of the thrust nozzle of modern jet engines, there are often sawtooth-shaped guide elements, the so-called chevrons. These serve to improve mixing of the air layers between the hot and fast combustion gases from the thrust nozzle and the cold and slower jacket flow. In VGC systems, SMA bending actuators are embedded in these composite components, which are activated by the exhaust gas temperature (Figure 10). The high temperatures prevailing during takeoff initially deform the conductive elements inward, thus ensuring low noise emissions from the engine. As altitude and speed increase and the ambient temperature drops as a result, they deform back outward, thus increasing the efficiency of the engine. This application is a structurally integrated actuator system, that is, a system in which the solid-state properties of the SMA material are specifically exploited.
Figure 10.
Variable geometry chevron with integrated SMA actuators [53].
Technically relevant shape memory alloys today are NiTi, NiTi(−X) (addition of further elements X), CuZnAl, and CuAlNi. NiTi and NiTi(−X) alloys offer the most balanced property profile. With respect to mechanical properties, CuZnAl and CuAlNi alloys exhibit some significant disadvantages. In particular, the smaller effect size (of shape memory effect) and the limited cycle stability should be mentioned. For this reason, NiTi alloys have become widely accepted today and are still the only alloys that are commercially available to any significant extent.
In the field of NiTi or NiTi(−X) alloys, the binary NiTi alloys with approximately stoichiometric composition have the greatest technical relevance [54]. The position of the phase transformation temperature is adjusted by the concentration ratio of the alloying partners Ni and Ti. It should be noted that even small deviations in the composition strongly influence the transformation temperature level. For example, a shift in the composition by approx. 0.1 atomic percent already means a shift in transformation temperature by approx. 10 K. Accordingly, the manufacturing process must be very precise.
Alloy-related disadvantages of the binary NiTi alloy can be compensated by adding further components (NiTi(−X)). The focus of research here is on shifting the transformation temperatures to higher temperatures (X: platinum, palladium, hafnium, zirconium), lower thermal hysteresis (X: copper), and the most linear possible relationship between martensite content and electrical resistance (X: copper) for self-sensing applications [55]. So far, only the alloy system NiTiCu has gained some importance. Compared to binary NiTi alloys, however, the availability of suitable semi-finished products is severely limited. The basic properties of different alloy systems are summarized in Table 1.
Characteristic
NiTi/NiTi(−X)
CuZnAl
CuAlNi
Density [g/cm3]
6.4…6.5
7.6…7.65
7.1…7.15
Specific electrical resistance [10−6 Ωm]
0.5…1.1
0.07…0.12
0.1…0.14
Thermal conductivity at 20 °C [W/(m•K)]
10…18
120
75
Thermal expansion coefficient [10−6 K−1]
6.6…10
17
17
Specific heat capacity [J/(Kg•K)]
490
390
440
Transformation enthalpy [J/kg]
28,000
7000
9000
Young’s modulus [GPa] (Austenite)
95
70…100
80…100
Fatigue stress [MPa]
250
75
100
Transformation temperatures [°C]
−50…100
−100…100
−100…170
Thermal hysteresis (As-Mf) [K]
20…40
10…20
20…25
Spread (Af-As) [K]
30
10…20
20…30
Max. one-way effect [%]
8
4
5
Max. two-way effect [%]
4
1
1.2
Typical fatigue cycles
1,000,000
100,000
10,000
Table 1.
Properties of technically important shape memory materials ([18, 55, 56]).
Thermal shape memory alloys have gained significant technological importance in the recent decades. The outstanding fatigue properties combined with resistance to corrosion and biocompatibility led to the breakthrough in the use of superelastic SMA in medical technology. Stents made of pseudoelastic nickel-titanium are used to dilate blood vessels. The rhythmic pulsation of the blood circulation causes dynamic loading of the stent with large strain amplitudes. It is evident that the stent material must be highly fatigue resistant to endure the enormous numbers of cycles during continuous use in the human body. In this context, the pseudoelasticity allows repeatable strains up to 8%. Depending on the thermal and mechanical load, cycle numbers of 107 and higher can be achieved today.
Due to the medical demand for nickel-titanium, this material is nowadays reproducibly available in large quantities worldwide at favorable prices. Due to their high energy density, SMAs are also becoming increasingly attractive for actuator applications. The potential of miniaturization, weight and energy savings, and the combination of actuator and sensing properties will also lead to more and more commercial applications for SMA actuators in the future.
For commercial systems with interesting economic quantities and yearly produced piece numbers, the logical focus is on SMA wire-based actuator systems, as the semi-finished product (the SMA wire) is available in good and reproducible quality from multiple world-wide sources in sufficient quantities. The main challenges for SMA wire-based actuator systems are the realization of efficient, fatigue-resistant systems with sufficient cycle-times in operation temperatures. While material development is focusing on aspects like improved fatigue behavior through microstructure and surface finish as well as increasing phase transformation temperatures for the realization of a wider range of applications, system engineering should put focus on the following aspects: Realization of higher actuation frequencies by implementation of bundled micro-diameter wires, increase of actuator stroke by specific kinematic designs, and smart system implementation to decrease total energy consumption.
The exploitation of the materials self-sensing ability will further enable the development of smarter drive solutions and add substantial benefits in competition with conventional actuator solutions. The handling of the hysteretic resistance feedback of SMA wires in applications as well as novel control algorithms might be the field of research with the biggest importance today.
The authors would like to thank André Bucht, Kenny Pagel, and Thomas Mäder for the pleasant collaboration on an SMA book project in the past, which served as a general guideline for this book chapter.
References
1.Motzki P, Bucht A, Pagel K, Mäder T, Seelecke S. Thermische Formgedächtnislegierungen. In: Böse H, editor. Smart Materials - Eigenschaften und Einsatzpotenziale. 1st ed. Würzburg: Vogel Communications Group; 2023. pp. 89-118 [Online]. Available from: https://vogel-fachbuch.de/detail/index/sArticle/1086
2.Reece PL. Progress in Smart Materials and Structures. New York: Nova Science Publishers, Inc.; 2007
4.Chang LC. Atomic displacements and crystallographic mechanism in Diffusionless transformation of gold-cadmium single crystals containing 475 atomic percent cadmium. Acta Crystallographica. 1951;4:320-324
5.W. J. Buehler, J. V. Gilfrich, and R. C. Wiley, Effect of low-temperature phase changes on the mechanical properties of alloys near composition TiNi, Journal of Applied Physics, vol. 34, no. 5, pp. 1475-1477, May 1963, doi: 10.1063/1.1729603.
6.Janocha H. Adaptronics and Smart Structures, 2. Berlin Heidelberg: Springer Verlag; 2007. DOI: 10.1017/CBO9781107415324.004
7.Janocha H, Bonertz T, Pappert G. Unkonventionelle Aktoren : eine Einführung. München: Oldenbourg Wissenschaftsverlag; 2013
8.Motzki P. Advanced Design and Control Concepts for Actuators Based on Shape Memory Alloy Wires. Dissertation, Saarland University. 2018. DOI: 10.22028/D291-27354
9.Mohd Jani J, Leary M, Subic A, Gibson MA. A review of shape memory alloy research, applications and opportunities. Materials and Design. 2014;56:1078-1113. DOI: 10.1016/j.matdes.2013.11.084
10.Van Humbeeck J, Chandrasekaran M, Delaey L. Shape memory alloys: Materials in action. Endeavour. 1991;15(4):148-154. DOI: 10.1016/0160-9327(91)90119-V
12.Funakubo H. Shape Memory Alloys. Vol. 1, no. D. Amsterdam: Gordon and Breach Science Publ; 1987. DOI: 10.1007/978-0-387-47685-8
13.Just E. Entwicklung eines Formgedächtnis-Mikrogreifers, Dissertation, Universität Karlsruhe. 2001
14.Duerig TW, Melton KN, Stöckel D, Wayman CM. Engineering Aspects of Shape Memory Alloys. London: Butterworth-Heinemann; 1990
15.Lagoudas DC. Shape Memory Alloys: Modeling and Engineering Applications. New York: Springer; 2008
16.Maaß B. Strukturbildungsprozesse und funktionelle Eigenschaften bei der Herstellung pseudoelastischer Ni-Ti-Cu-(X)- Formgedächtnislegierungen. Dissertation, Ruhr-Universität Bochum. 2012
17.Otsuka K, Wayman CM. Shape Memory Materials. Cambridge: Cambridge University Press; 1998
19.Crews JH. Development of a shape memory alloy actuated robotic catheter for endocardial ablation: Modeling, design optimization, and control. 2011 [Accessed: Oct. 22, 2015] [Online]. Available from: http://gradworks.umi.com/34/63/3463761.html
20.Zimmerman E, Muntean V, Melz T, Seipel B, Koch T. Novel pre-crash-actuator-system based on SMA for enhancing side impact safety. In: Meyer G, Valldorf J, Gessner W, editors. Advanced Microsystems for Automotive Applications. VDI-Buch. Berlin, Heidelberg: Springer; 2009. DOI: 10.1007/978-3-642-00745-3_4
21.Kohl M, Krevet B, Just E. SMA microgripper system. Sensors and Actuators A: Physical. 2002;97-98:646-652. DOI: 10.1016/S0924-4247(01)00803-2
22.Janocha H. Unkonventionelle Aktoren. München: Oldenbourg Wissenschaftsverlag; 2013. DOI: 10.1524/9783486756920/HTML
24.Dynalloy Inc. Technical Characteristics of Flexinol Actuator Wires. Datasheet; 2019. Available from: http://www.dynalloy.com/pdfs/TCF1140.pdf [accessed May 15, 2021]
26.Britz R, Motzki P. Analysis and evaluation of bundled SMA actuator wires. Sensors and Actuators A: Physical. 2022;333:113233. DOI: 10.1016/j.sna.2021.113233
27.Molitor P, Britz R, Motzki P. High-power shape memory alloy catapult actuator for high-speed and high-force applications. IEEE Access. 2022;10:92373-92380. DOI: 10.1109/ACCESS.2022.3202210
28.Britz R, Rizzello G, Motzki P. High-speed antagonistic shape memory actuator for high ambient temperatures. Advanced Engineering Materials. 2022;24:2200205. DOI: 10.1002/adem.202200205
29.Britz R, Motzki P, Seelecke S. Thermal actuator arrangement having improved reset time. WO2021052933A1, US17761385. 2019
31.Motzki P, Seelecke S. Bi-stable SMA actuator. In: Borgmann H, editor. Actuator 16 - 15th International Conference on New Actuators. Bremen, Germany: MESSE BREMEN; 2016. pp. 317-320. DOI: 10.13140/RG.2.2.12065.20325
32.Motzki P, Seelecke S. Bistabile Aktorvorrichtung mit einem Formgedächtniselement DE 10 2016 108 627 A1. 2016 [Online]. Available from: https://depatisnet.dpma.de/DepatisNet/depatisnet?action=bibdat&docid=DE102016108627A1
33.Motzki P, Seelecke S. Bistable actuator device having a shape memory element. WO 2017/194591 A1. 2016 [Online]. Available from: https://depatisnet.dpma.de/DepatisNet/depatisnet?action=bibdat&docid=WO002017194591A1
34.Motzki P, Seelecke S. Bistable actuator device having a shape memory element. US 2019/0203701 A1. 2019
35.Vollach S, Shilo D. The mechanical response of shape memory alloys under a rapid heating pulse. Experimental Mechanics. 2010;50(6):803-811. DOI: 10.1007/s11340-009-9320-z
36.Dana A, Vollach S, Shilo D. Use the force: Review of high-rate actuation of shape memory alloys. Actuators. 2021;10(7):140. DOI: 10.3390/ACT10070140
37.Vollach S, Shilo D, Shlagman H. Mechanical response of shape memory alloys under a rapid heating pulse - part II. Experimental Mechanics. 2016;56(8):1465-1475. DOI: 10.1007/s11340-016-0172-z
38.Motzki P, Gorges T, Kappel M, Schmidt M, Rizzello G, Seelecke S. High-speed and high-efficiency shape memory alloy actuation. Smart Materials and Structures. 2018;27(7):075047. DOI: 10.1088/1361-665X/aac9e1
39.Ingpuls GmbH. Produkte und Leistungen. [Online]. Available from: https://ingpuls.de/produkte-leistungen/
40.Duerig TW. Applications of shape memory. In: Materials Science Forum. Vols. 56-58. Trans Tech Publications, Ltd.; 1991. pp. 679-691. DOI: 10.4028/www.scientific.net/msf.56-58.679
41.Actuator Solutions GmbH. Actuator solutions SMA products. 2018. Available from: http://www.actuatorsolutions.de/products/ [accessed Nov. 15, 2020]
42.Actuator solutions GmbH. Pictures sent to me by Actuator solutions GmbH
43.Motzki P, Seelecke S. Industrial applications for shape memory alloys. In: Olabi A-G, editor. Encyclopedia of Smart Materials. Elsevier; 2022. pp. 254-266. DOI: 10.1016/B978-0-12-803581-8.11723-0. Available from: https://www.sciencedirect.com/science/article/abs/pii/B9780128035818117230
45.Motzki P, Khelfa F, Zimmer L, Schmidt M, Seelecke S. Design and validation of a reconfigurable robotic end-effector based on shape memory alloys. IEEE/ASME Transactions on Mechatronics. 2019;24(1):293-303
46.Mandolino MA, Goergen Y, Motzki P, Rizzello G. Design and characterization of a fully integrated continuum robot actuated by shape memory alloy wires. In: 2022 IEEE 17th International Conference on Advanced Motion Control (AMC), Padova, Italy. 2022. pp. 6-11. DOI: 10.1109/AMC51637.2022.9729267
47.Goergen Y, Rizzello G, Seelecke S, Motzki P. Modular design of an SMA driven continuum robot. In: Proceedings of the ASME 2020 Conference on Smart Materials, Adaptive Structures and Intelligent Systems. ASME 2020 Conference on Smart Materials, Adaptive Structures and Intelligent Systems. Virtual, Online. September 15, 2020. V001T04A007. ASME. DOI: 10.1115/SMASIS2020-2213
48.McMahan W, Jones BA, Walker ID. Design and implementation of a multi-section continuum robot: Air-Octor
49.Cowan LS, Walker ID. The importance of continuous and discrete elements in continuum robots. International Journal of Advanced Robotic Systems. 2013;10(3). DOI: 10.5772/55270
50.de Navarro y Sosa I, Bucht A, Junker T, et al. Novel compensation of axial thermal expansion in ball screw drives. Production Engineering: Research and Development. 2014;8:397-406. DOI: 10.1007/s11740-014-0528-0
51.Calkins FT, Mabe JH. Shape memory alloy based morphing Aerostructures. Journal of Mechanical Design. 2010;132(11):111012. DOI: 10.1115/1.4001119
52.Mabe JH, Calkins FT, Alkislar MB. Variable area jet nozzle using shape memory alloy actuators in an antagonistic design. In: Proceedings of SPIE 6930, Industrial and Commercial Applications of Smart Structures Technologies. 69300T. 22 April 2008. DOI: 10.1117/12.776816
53.Oehler SD, Hartl DJ, Lopez R, Malak RJ, Lagoudas DC. Design optimization and uncertainty analysis of SMA morphing structures. Smart Materials and Structures. 2012;21(9):094016. DOI: 10.1088/0964-1726/21/9/094016
54.Mertmann M. NiTi-Formgedächtnislegierungen für Aktoren der Greifertechnik. Fortschrittsbericht VDI Reihe 5 Nr. 469, Düsseldorf. 1997.
 Open access peer-reviewed chapter
Open access peer-reviewed chapter