Open Access is an initiative that aims to make scientific research freely available to all. To date our community has made over 100 million downloads. It’s based on principles of collaboration, unobstructed discovery, and, most importantly, scientific progression. As PhD students, we found it difficult to access the research we needed, so we decided to create a new Open Access publisher that levels the playing field for scientists across the world. How? By making research easy to access, and puts the academic needs of the researchers before the business interests of publishers.
We are a community of more than 103,000 authors and editors from 3,291 institutions spanning 160 countries, including Nobel Prize winners and some of the world’s most-cited researchers. Publishing on IntechOpen allows authors to earn citations and find new collaborators, meaning more people see your work not only from your own field of study, but from other related fields too.
To purchase hard copies of this book, please contact the representative in India:
CBS Publishers & Distributors Pvt. Ltd.
www.cbspd.com
|
customercare@cbspd.com
Orthogonal polynomials are the natural way to express the elements of the inner product spaces as an infinite sum of orthonormal basis sets. The construction and development of the many important numerical algorithms are based on the operational matrices of orthogonal polynomials including spectral tau, spectral collocation, and operational matrices approach are few of them. The widely used orthogonal polynomials are Legendre, Jacobi, and Chebyshev. However, only a few papers are available where the Hermite polynomials (HPs) were exploited to solve numerically the differential equations. The notable characteristic of the HPs is its ability to approximate the square-integrable functions on the entire real line. The prime objective of this chapter is to introduce the two new generalized operational matrices of HPs which are developed in the sense of the Riemann-Liouville fractional-order integral operator and Hilfer fractional-order derivative operator. The newly derived operational matrices are further used to construct a numerical algorithm for solving the Bagley–Torvik types fractional derivative differential equations (FDDE). Moreover, the results obtained by using the proposed algorithm are compared with the results obtained otherwise to demonstrate the efficiency and accuracy of the proposed numerical algorithm. Some examples are solved for application purposes.
Nonlinear Analysis Group (NAG), Mathematics Department, Virtual University of Pakistan, Pakistan
Faruk Özger
Department of Engineering Sciences, Izmir Katip Celebi University, Izmir, Turkey
*Address all correspondence to: imrantaalib@gmail.com;, imrantalib@vu.edu.pk
1. Introduction
It’s a proven fact that every vector space V generated by a finite set of vectors has a basis [1]. But what’s the situation if V is not finitely generated? For example C01, the vector space of all real-valued continuous functions defined on the compact interval 01; PR, the vector space of all real-valued polynomials defined on R; and R∞, the vector space of infinite sequences β1β2⋯ of real numbers. Do these spaces have bases? If they have then how can we construct them? The case for PR is so obvious because every f∈PR can be expressed as a finite linear combination of the infinite set of polynomials 1xx2x3⋯xn⋯. However, the case for R∞ is so surprising because there is no general way to add together infinitely many vectors in a vector space. So what about the basis of R∞? Since R∞ is a natural generalization of Rn, therefore, consider the set S=e1e2e3⋯en⋯ which generalizes the standard basis for Rn. Clearly, S is linearly independent but it does not span R∞ because every finite linear combination of the ei’s is a vector having only finitely many components nonzero. For example, the vector u=11⋯∈R∞ can not be expressed as linear combination of the vectors ei=00⋯,0,1,0⋯. Therefore, the set S together with vector u must be a linearly independent set, so that if it spans R∞ then it must be a basis set. But unfortunately, it does not span R∞ because the vector v=1,2,3⋯ can not be written as a linear combination of the vectors u and ei’s. Continuing in the same way, one can enlarge the set S to a maximal linearly independent set, such that, it generates R∞. But will this process eventually be terminated, and produces the basis for R∞? Actually, we are unable to construct any countable set of vectors in R∞ that may span it. Although, Zorn’s Lemma can be applied to show that every V has bases, see [2, 3, 4]. However, it does not explain the procedure of how to actually construct these bases if V is not finitely generated. So, the construction of bases for infinite dimensional vector spaces is a serious problem that requires some alternative ideas where the sum of infinitely many vectors makes some sense.
One might claim that the vector u∈R∞ can be uniquely expressed as an “infinite linear combination” of the elements of S, such that, u=∑j=1∞βjej. But the generally infinite sum of vectors does not convey any sense due to many reasons. For instance, can we make some sense by adding the vectors 11⋯, 22⋯, and 33⋯? Even algebraic manipulations with this infinite sum will lead to some serious problems. Might be some certain infinite sums in certain vector spaces, like R∞ make some sense but they can not be generalized to other settings. So, we have to come up with alternative ways where the idea of infinite sums conveys some sense in general settings.
The only technique that can provide sense to adding infinitely many vectors is to consider the sequence of partial sums, Pk=∑j=1kuj, k=1,2,⋯, provided that it converges. There the convergence means that the sequence Pk is getting closer and closer to some fixed P as k→∞, i.e., the distance between Pk and P is getting smaller and smaller with increasing k. Therefore, we need the notion of defining the distance in vector spaces to provide sense to an infinite sum of vectors ∑j=1∞uj. However, the distance can be defined as those vector spaces for which we have an inner product. Consequently, the inner product spaces are the natural way to give sense to infinite sums of vectors.
Now our question of finding the basis set for infinite dimensional vector spaces turns into finding an orthonormal set un such that it spans whole space V. If it happens then the set un is called the orthonormal basis for V. This idea is very useful in many applications of mathematics, particularly in approximation theory, see [5, 6, 7, 8, 9, 10, 11, 12].
Orthogonal polynomials are the best alternative way that provides a meaningful sense of an infinite sum of vectors, provided that this sum converges to some fixed vector f in Hilbert spaces which are the complete inner product spaces. These polynomials provide an orthonormal basis that generates the L2 spaces which are the prototypical examples of Hilbert spaces. The elements of L2 spaces are the square-integrable functions, i.e., all functions f either defined on finite, semi-infinite, or infinite intervals must have ∫lower limitupper limitf2dx finite. it is worth mentioning that the L2 spaces provide the L2 convergence or “convergence in mean” rather than point-wise convergence. The most frequently used orthogonal polynomials are Legendre, Jacobi, Chebyshev, Laguerre, Chelyshkov, and HPs, see [13, 14, 15, 16, 17, 18].
The aforementioned polynomials have widespread implications for solving a wide range of problems in Mathematics and its related disciplines. Numerous problems in science and engineering which contain differential and integral equations have been solved by using these polynomials, see [8, 10, 17, 18, 19]. The frameworks of many important numerical methods are dependent on the orthogonal polynomials, for instance, but not limited to spectral tau method, spectral collocation method, and operational matrices approach, see [7, 8, 15, 16].
Motivated by the aforementioned studies, our prime objective is to reveal the applicability of the HPs for solving the Bagley–Torvik types FDDE where the fractional-order derivatives are considered in the sense of Hilfer. These polynomials are very practical for solving those problems in which the solution is defined on the entire real line. Additionally, these polynomials have widespread applications in various areas of Physics, Economics, and Biology. For instance, in the problems of meteorology and coastal hydrodynamics, see [20]; in the problems of biological and epidemiological sciences where the HPs were employed to reduce the multi-dimensional system of ordinary differential equations into a system of algebraic equations, see [21]; in the problems of Economics, where the HPs method was used to express the behavior of financial variables, see [22]. In addition, HPs have been extensively used in the modeling of non-Gaussian excitations that reflect models of numerous phenomena surrounding us, see [23, 24].
We consider the following Bagley–Torvik types FDDE [25].
λ3x′′t+λ1HDα,βxt+λ2xt=yt,t∈−∞∞,x0=c1,x′0=c2,E1
where c1, c2, λ1, λ2, and λ3 are arbitrary real constants with λ3≠0. The fractional-order derivative is in the sense of Hilfer, and yt is the source term. The analytical solution of the problem (1) for c1=c2=0 can be computed by solving the following integral equation
xt=∫0tGt−zyzdz,E2
where G is a green function given as under
Gt=1λ3∑l=0∞−1lΓl+1λ2λ3lt2l+1E1/2,2+3l/2l−λ1λ3t,E3
The expression Eγ,δl is the lth derivative of the two parametric Mittagg-Leffler function, given as ([26], 8.26)
Eγ,δlt=∑i=0∞Γi+l+1tiΓi+1Γγi+γl+δ,l=0,1,⋯.E4
The analytical solution (2) of the problem (1) involves the convolution integral that consists of Green’s function which is hard to compute for the generalized functions due to the involvement of the infinite sums of the derivatives of the Mittag-Leffler function. That complication motivated the development of the numerical methods for solving (1).
In the literature, various numerical methods have been used to obtain the approximate solution of the problem (1). A few of them are listed there: in [27], the author solved (1) by introducing the exponential integrators; in [28], the authors developed the collocation–shooting technique to solve (1); in [29], the authors introduced the Taylor matrix method to approximate the solution function of (1); in [25], the authors developed the alternative numerical schemes to solve (1) by introducing its discretization which is based on fractional linear multistep methods; in [30], the author proposed the Bessel collocation method to solve numerically the problem (1); in [31], the authors approximated the solution function of (1) by using the basis of the second kind Chebyshev wavelet; in [32], the authors solved (1) by proposing an analytical technique based on the variational iteration method and the Adomian decomposition method; and in [33], the authors proposed the analytical solution of (1) by using the Adomian decomposition technique. For more study on the analytical and approximate techniques developed for obtaining the solution of the problem (1), we refer the reader to study ([26], p. 230), ([34], Thm. 4.1), cf. ([26], Eqs. (8.26) and (8.27)), [35, 36, 37, 38].
We introduced an operational matrices approach for computing the approximate solution to the problem (1). The framework of the proposed approach is based on the fractional-order integral and fractional-order derivative operational matrices of HPs. The fractional-order derivative is considered in the sense of Hilfer. By means of the operational matrices, the problem (1) is transformed into Matrix Equations which are then solved by using the Matlab built-in function, lyap. Finally, the solution of (1) is approximated by using the basis of HPs. The proposed approach is easier to use than spectral Tau and spectral collocation methods when the solution is approximated as the basis of HPs. Because HPs provide the approximation of the solution function on the entire real line, thus involve the improper integrals to compute the series coefficients and to determine the residual functions as the case of the spectral Tau method, see ([39], Eq. (29)). So generally, it’s hard to compute the improper integral for the generic functions by using the analytical techniques of integrations. We have to approximate those integrals numerically which may compromise the accuracy. However, the proposed approach is independent of computing the residual functions and the choice of suitable collocation points. Additionally, the proposed approach transforms the problems into Sylvester equations that involve an unknown vector determined by using the Matlab built-in function, lyap. The unknown vector is then used to approximate the solution functions of the problems. It’s worth mentioning that we introduce the new generalized derivative operational matrix developed in the sense of Hilfer. Also, the problem (1) is not yet to be solved with Hilfer fractional-order derivatives.
The scholarly discussion between two great names of the nineteenth century, L’Hospital and Leibniz opened the discussion on the urge and development of noninteger-order derivatives and integral operators. For many years, the subject of Fractional calculus (FC) had been considered as an abstract mathematical idea without having applications in physics and engineering sciences. However, the notable contributions of some renowned scientists, Euler, Laplace, Fourier, Abel, Liouville, Grunwald, Letnikov, Riemann, Laurent, Heaviside, Weyl, Hardy, Riesz, Caputo, Samko, Srivastava, Oldham, Osler, Mainardi, Love, Spanier, Ross, Bagley, Torvik, Baleanu, Atangana, and Katugampola provide the wings to FC, and now it’s soaring in the sky due to its immense applications in every field of sciences, see [26, 40, 41, 42, 43, 44, 45, 46, 47, 48, 49, 50].
The fractional derivative operators can not be uniquely defined like integer-order derivative operators. Scientists developed various types of fractional derivative operators to observe nature in a precise way. So expressing the physical phenomena with a single derivative can not capture their various attributes because nature is not constant, it’s evolving and developing in every second. Therefore, there is a strong need for generalized operators that should have abilities to demonstrate the generic behavior of the physical phenomena, see ([51], Chap. 5,7, and [15, 52, 53]). The most commonly used fractional derivative operators are the Riemann–Liouville and Caputo expressed in the following way [26]:
RLJb+αxt=1Γα∫btt−yα−1xydy,t>b,α>0.E5
Thus the fractional-order derivative operators in Riemann–Liouville and Caputo senses can be expressed as
respectively, where n−1<α<n,n∈N, and α>0. The following results about Riemann–Liouville fractional-order integral and Caputo fractional-order derivative operators are very useful in computing the operational matrices, see ([7], Thm. 4.7) and ([39], Thm. 1).
Generalization is a very useful process that allows researchers to make inferences for a wide class of problems. Mathematicians are always curious about developing generalized results that allow them to recognize the similarities in results acquired in one circumstance and cover many useful results as special cases. So Hilfer proposed a generalized fractional-order derivative operator that treats (6) as special cases, see [46].
Definition 1. The generalized fractional-order derivative in Hilfer’s sense is defined as
HPs are the classical orthogonal polynomials that have the ability to approximate any square-integrable function on the entire real line. These polynomials have widespread applications in many areas of applied sciences, including Physics, Economics, and Biolog, see [20, 21, 22, 23, 24]. This section is devoted to illustrating some useful properties of HPs.
HPs can be defined using the following analytical expression, see [55].
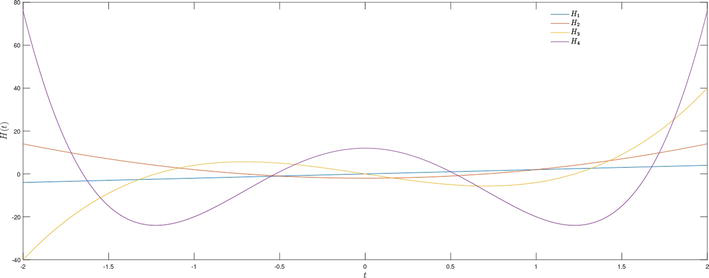
where the notation j is the floor function that takes input as a real number j and exhibits as output the greatest integer less than j. Using (10), one may compute the following HPs for j=0,1,⋯,4 as
The orthogonality conditions for HPs with respect to the weight function, wt=exp−t2 are listed there
Figure 1.
Hermite polynomials plots for various j.
∫−∞∞wtHjtHitdt=0,fori≠j,π2jΓj+1fori=j.E12
3.1 Useful properties of HPs
In this section, we list some interesting properties of HPs that are useful to construct integer-order derivative and integer-order integral operational matrices of HPs.
The following are the HPs recurrence relations, see [56].
Hj1t=2jHj−1t,forj≥1.E13
Hj+1t=2tHjt−2jHj−1t,forj≥1.E14
Any square-integrable function, i.e., xt∈L2−∞∞ can be uniquely expressed as the basis of HPs in the following way
xt=∑j=0∞hjHjt,E15
where hj are the series coefficients that can be computed using (12) as
hj=1π2jΓj+1∫−∞∞wtxtHjtdt,j=0,1,⋯.E16
Considering the first m+1-terms of HPs, (15) can also be written as
This section deals with the operational matrices of HPs that are constructed by using the analytical form (10) of HPs and Riemann–Liouville fractional-order integral operator and Hilfer fractional-order derivative operator.
Lemma 4.1. ([56], Section 3) The Hermite integer-order integral operational matrix can be determined by using the following integral property
∫0t∫0t⋯∫0tΩydyk⏟k−times≃PkΩt,E18
where P is the m+1×m+1 Hermite operational matrix of integration. For example, for m=4, and k=1, we have
P=0120001201400000160−320001800000,E19
Ωt=12t4t2−28t3−12t16t4−48t2+12,E20
and
χT=1201400.E21
Using (19)–(21), the approximate integral of t2 is t33 that coincides with the analytical integral of t2.
Lemma 4.2. ([57], Thm. 1) The Hermite integer-order derivative operational matrix can be determined by using the following derivative property
dkdtkΩt=H1kΩt,E22
where H1 is the m+1×m+1 Hermite operational matrix of derivatives. Defined as.
Hp,l1=2p,forl=p−1,0,otherwise.
For example at m=5, we have
H1=0000002000000400000060000008000000100,E23
Ωt=12t4t2−28t3−12t16t4−48t2+1232t5−160t3+120t,E24
and
χT=0.7788−0.0000−0.09740.00000.00200.0000.E25
Using (23)–(25), the approximate derivative of cost is as following
Consequently, Eqs. (29) and (31) prove the result. □
4.1 New Hermite generalized operational matrices
In this section, we introduce new operational matrices of HPs that are used to approximate the derivative terms of the problem (1). The operational matrices are constructed in the senses of the Riemann–Liouville fractional-order integral operator and Hilfer fractional-order derivative operator.
Theorem 4.5.IfΩtis the Hermite function vector as defined inEq. (17), then
RLJ0+γΩt≃PγΩt,E32
where Pγ is the Hermite generalized integral operational matrix of order γ∈R+ and dimensions m+1×m+1 that can be computed using the following expression
Theorem 4.6.IfΩtis the Hermite function vector as defined inEq. (17), then
HD0+α,βΩt≃HαβΩt,E41
where Hα,β is the Hermite generalized derivative operational matrix of order α and dimensions m+1×m+1 that can be computed using the following expression
In this section, we develop a numerical algorithm that is based on the Hermite integrals and derivatives operational matrices. The framework of the proposed algorithm transforms the problem (1) to matrix equations of Sylvester types that are easy to handle with any computational software. The matrix equations compute the unknown vector χT which leads to the solution of the problem (1).
Suppose the following holds true
HDα,βxt=χTΩt.E50
Integrating the Eq. (50) by applying the Riemann–Liouville fractional-order integral defined in (5) of order γ, we have
xt=χRLTJγΩt+∑a=01bata,1<γ≤2,0<β≤1,E51
where ba’s are the constant of integration determined by using the initial conditions (1), we have the following equation
xt=χRLTJγΩt+∑a=01cata.E52
Using Theorem 4.5 and approximating the term ∑a=01cata with Hermite function vector, Eq. (51) can also be expressed as
xt≃χTPγΩt+B1×m+1TΩt,E53
where ∑a=01cata=B1×m+1TΩt. The terms of the problem (1) can be computed by using Theorem 4.6 and Eq. (53), we have
HDα,βxt=χTPγHαβΩt+B1×m+1THαβΩt,yt=A1×m+1TΩt.E54
Using Eqs. (50), (53), and (54) in (1), we have the following matrix equation of Sylvester type with an unknown vector χT of dimensions 1×m+1.
By introducing the notations, Δm+1×m+1=λ1PγHαβ+λ2Pγ and Λ1×m+1=A1×m+1T−λ1B1×m+1THαβ−λ2B1×m+1T for the sake of simplifications, Eq. (55) can be written as
χ1×m+1T+χ1×m+1TΔm+1×n+1=Λ1×m+1.E56
By solving (56), we can easily compute the unknown vector χ1×m+1T which then substituting in Eq. (53) yields the solution of the problem (1).
In this section, we solve some examples to test the applicability and efficiency of the proposed algorithm discussed in Section 5. The results are displayed in Tables and Plots.
Example 6.1. Consider the following Bagley–Torvik equation with initial conditions
λ3x′′t+λ1HDα,βxt+λ2xt=yt,t∈−1010,x0=c1,x′0=c2,E57
where, yt=1+t, 1<α<2, 0<β<1, c1=0, c2=1, and λ1=λ2=λ3=1.
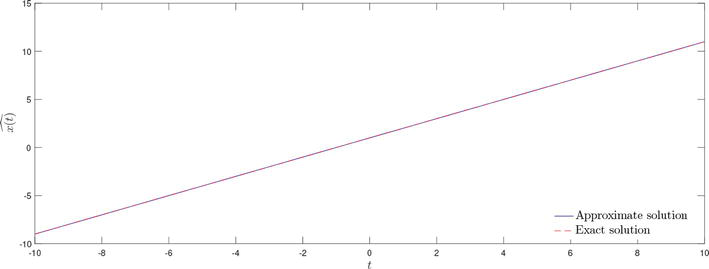
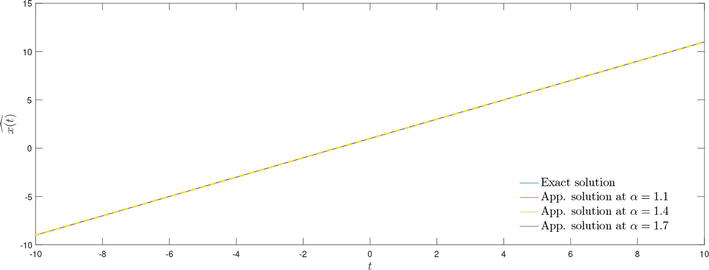
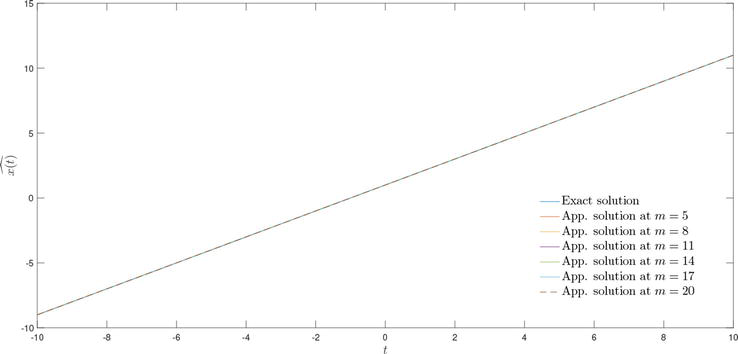
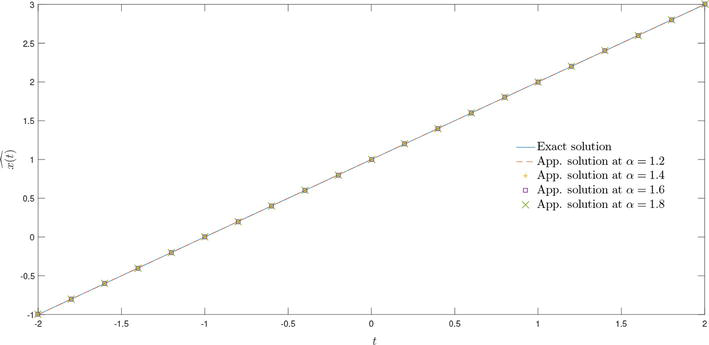
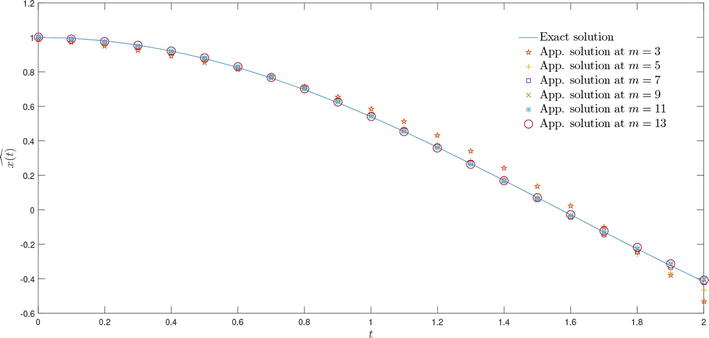
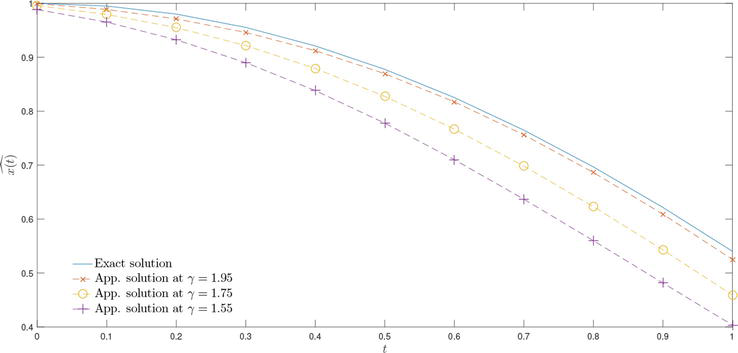
We solved the Bagley–Torvik FDDE by developing the fractional-order derivative operational matrices of HPs. The operational matrices were developed in the sense of Hilfer fractional-order derivative. We observed that HPs’ basis is well fit to approximate any square-integrable function on the entire real line, see Figures 1 and 2. Also, the integrals and derivatives of square-integrable functions were computed by using the Hermite operational matrices had a great resemblance with the results computed by using the analytical techniques of integrals and derivatives, see Figures 3 and 4. Based on the Hermite operational matrices, we introduced a numerical algorithm that is capable to transform the FDDE into a system of matrix equations of Sylvester types that are easy to handle with any computational software. We checked the accuracy and stability of the PNA by solving various Bagley–Torvic types FDDE corresponding to various initial conditions. We observed that the approximate solution obtained by using the PNA coincided with the exact solution by taking only a few terms of HPs, see (Example 6.1, Figure 5) and (Example 6.2, Table 1). We also analyzed the stability of the PNA by computing the approximate solution at various values of α and at various values of m, see Figures 6–10, and Table 2. We noted that as m getting large and α was getting closer to 32, the approximate solution approached to the exact solution of the problem. We also computed the amount of the absolute error for Example 6.4 at various values of m, and observed that the error decreased significantly for increasing m, see Table 3. The numerical accuracy of the results computed by using PNA was also analyzed by comparing the results with the Adomian method. We noted that the PNA prodoced better accuracy as compared to the Adomian method, see (Example 6.3, Table 2).
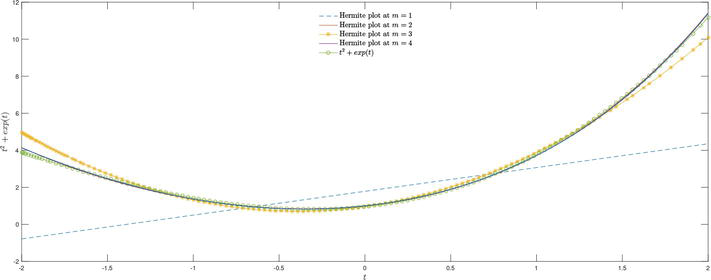
Figure 2.
Approximation of t2+expt using Hermite function vectors (17) at various values of m.
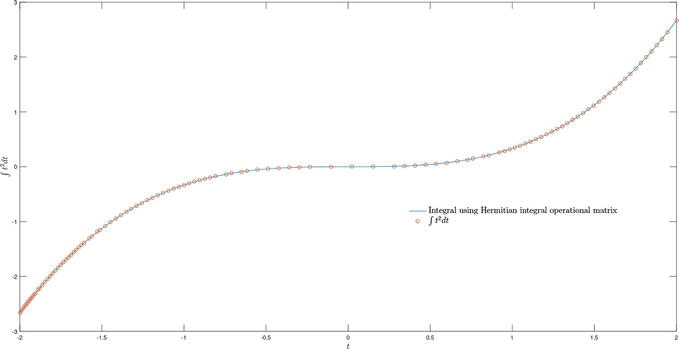
Figure 3.
The analytical and approximate integral plots of t2 at m=4 by using Hermite integral operational matrix.
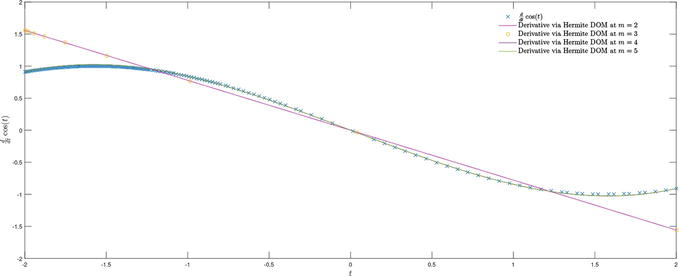
Figure 4.
The analytical and approximate derivative plots of cost at different values of m by using Hermite derivative operational matrices (DOM).
Figure 5.
The graphical view of exact and approximate solutions of Example 6.1 at m=2, and α=1.5.
t
xt̂ at m=2
xt̂ at m=3
xt̂ at m=10
xt̂ at m=15
Exact solution
−1
0.0
0.0
0.0
0.0
0.0
−0.8
0.2
0.2
0.2
0.2
0.2
−0.6
0.4
0.4
0.4
0.4
0.4
−0.4
0.6
0.6
0.6
0.6
0.6
−0.2
0.8
0.8
0.8
0.8
0.8
0
1.0
1.0
1.0
1.0
1.0
0.2
1.2
1.2
1.2
1.2
1.2
0.4
1.4
1.4
1.4
1.4
1.4
0.6
1.6
1.6
1.6
1.6
1.6
0.8
1.8
1.8
1.8
1.8
1.8
1
2.0
2.0
2.0
2.0
2.0
Table 1.
Approximate solution of Example 6.2 is computed at various m.
Figure 6.
The graphical view of exact and approximate solutions of Example 6.1 at m=2, and various values of α.
Figure 7.
The graphical view of exact and approximate solutions of Example 6.1 at α=1.5, and various values of m.
Figure 8.
The graphical view of exact and approximate solutions of Example 6.2 at m=2, and various values of α.
Figure 9.
The graphical view of exact and approximate solutions of Example 6.4 at various values of m.
Figure 10.
The graphical view of exact and approximate solutions of Example 6.4 at m=12, and various values of γ.
t
Analytical solution
Adomian method
PNA at m=16
PNA at m=20
0
0.000000
0.000000
0.000000
0.000000
0.2
0.125221
0.140640
0.168975
0.147779
0.4
0.455435
0.533284
0.509874
0.491041
0.6
0.950392
1.148840
1.0384000
1.024804
0.8
1.579557
1.963033
1.726857
1.693681
1
2.315526
2.952567
2.524754
2.453043
Table 2.
Approximate solution of Example 6.3 obtained using the proposed numerical algorithm (PNA) are compared with the solution obtained using the Adomian method [32].
t
Error at m=5
Error at m=7
Error at m=9
Error at m=15
Error at m=30
0
0.000851555699954
0.000015168258275
0.000038589837968
0.000011170515838
0.000000771779988
0.2
0.013708145743312
0.009294768239541
0.007147462915103
0.003988632129512
0.000055034808212
0.4
0.011893816308316
0.006240104002812
0.003411075508628
0.000010952382595
0.000000030115944
0.6
0.001779738199402
0.001752762045013
0.003127688012188
0.003162961831284
0.000009796683838
0.8
0.010343264247858
0.008577085429824
0.006809926671596
0.002261792740019
0.000000600336283
1
0.018882601807647
0.010311814708410
0.005334232561979
0.000946037042348
0.000000892574348
Table 3.
Absolute error of Example 6.4 is computed at various m.
1.Conway JB. A Course in Functional Analysis. Vol. 96. New York, NY: Springer; 2019
2.Campbell PJ. The origin of “zorn’s lemma”. Historia Mathematica. 1978;5(1):77-89
3.Blass A. Existence of bases implies the axiom of choice. Contemporary Mathematics. 1984;31:1-3. DOI: 10.1090/conm/031/763890
4.Keremedis K. Bases for vector spaces over the two-element field and the axiom of choice. Proceedings of the American Mathematical Society. 1996;124(8):2527-2531
5.Talib I, Noor ZA, Hammouch Z, Khalil H. Compatibility of the paraskevopoulos’s algorithm with operational matrices of vieta–lucas polynomials and applications. Mathematics and Computers in Simulation. 2022;202:442-463
6.Talib I, Raza A, Atangana A, Riaz MB. Numerical study of multi-order fractional differential equations with constant and variable coefficients. Journal of Taibah University for Science. 2022;16(1):608-620
7.Talib I, Bohner M. Numerical study of generalized modified caputo fractional differential equations. International Journal of Computer Mathematics. 2022;100:1-24
8.Kumar N, Mehra M. Collocation method for solving nonlinear fractional optimal control problems by using hermite scaling function with error estimates. Optimal Control Applications and Methods. 2021;42(2):417-444
9.Kumar S, Kumar R, Momani S, Hadid S. A study on fractional covid-19 disease model by using hermite wavelets. Mathematical Methods in the Applied Sciences. 2021:1-17. DOI: 10.1002/mma.7065
10.Yari A. Numerical solution for fractional optimal control problems by hermite polynomials. Journal of Vibration and Control. 2021;27(5–6):698-716
11.Talib I, Jarad F, Mirza MU, Nawaz A, Riaz MB. A generalized operational matrix of mixed partial derivative terms with applications to multi-order fractional partial differential equations. Alexandria Engineering Journal. 2022;61(1):135-145
12.Pu T, Fasondini M. The numerical solution of fractional integral equations via orthogonal polynomials in fractional powers. 2022. arXiv preprint arXiv:2206.14280
13.Doha EH, Bhrawy AH, Ezz-Eldien SS. A new Jacobi operational matrix: An application for solving fractional differential equations. Applied Mathematical Modelling. 2012;36(10):4931-4943
15.Kazem S, Abbasbandy S, Kumar S. Fractional-order Legendre functions for solving fractional-order differential equations. Applied Mathematical Modelling. 2013;37(7):5498-5510
16.Talaei Y, Asgari M. An operational matrix based on Chelyshkov polynomials for solving multi-order fractional differential equations numerical solution the fractional Bagley–Torvik equation arising in fluid mechanics. Neural Computing and Applications. 2018;30:1369-1376
17.Harris FE. Chapter 14 - series solutions: Important odes. In: Harris FE, editor. Mathematics for Physical Science and Engineering. Boston: Academic Press; 2014. pp. 487-543
18.Van Assche W. Ordinary special functions. In: Françoise J-P, Naber GL, Tsun TS, editors. Encyclopedia of Mathematical Physics. Oxford: Academic Press; 2006. pp. 637-645
19.Poteryaeva VA, Bubenchikov MA. Applications of orthogonal polynomials to solving the schrodinger equation. Reports on Mathematical Physics. 2022;89(3):307-317
20.Dattoli G. Laguerre and generalized hermite polynomials: the point of view of the operational method. Integral Transforms and Special Functions. 2004;15(2):93-99
21.Secer A, Ozdemir N, Bayram M. A hermite polynomial approach for solving the SIR model of epidemics. Mathematics. 2018;6(12):305
22.Perote J, Del Brio E. Positive definiteness of multivariate densities based on hermite polynomials. Available at SSRN 672522. 2005
23.Zhang X-Y, Zhao Y-G, Zhao-Hui L. Straightforward hermite polynomial model with application to marine structures. Marine Structures. 2019;65:362-375
24.Liu M, Peng L, Huang G, Yang Q, Jiang Y. Simulation of stationary non-gaussian multivariate wind pressures using moment-based piecewise hermite polynomial model. Journal of Wind Engineering and Industrial Aerodynamics. 2020;196:104041
25.Diethelm K, Ford J. Numerical solution of the Bagley-Torvik equation. BIT Numerical Mathematics. 2002;42(3):490-507
26.Podlubny I. Fractional differential equations, volume 198 of Mathematics in Science and Engineering. In: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of their Solution and Some of their Applications. San Diego, CA: Academic Press, Inc.; 1999
27.Esmaeili S. The numerical solution of the Bagley-Torvik equation by exponential integrators. Scientia Iranica. 2017;24(6):2941-2951
28.Al-Mdallal QM, Syam MI, Anwar MN. A collocation-shooting method for solving fractional boundary value problems. Communications in Nonlinear Science and Numerical Simulation. 2010;15(12):3814-3822
29.Gülsu M, Öztürk Y, Anapali A. Numerical solution the fractional Bagley–Torvik equation arising in fluid mechanics. International Journal of Computer Mathematics. 2017;94(1):173-184
30.Yüzbaş Ş. Numerical solution of the Bagley–Torvik equation by the bessel collocation method. Mathematical Methods in the Applied Sciences. 2013;36(3):300-312
31.Setia A, Liu Y, Vatsala AS. The solution of the Bagley-Torvik equation by using second kind chebyshev wavelet. In: 2014 11th International Conference on Information Technology: New Generations. Las Vegas: IEEE; 2014. pp. 443-446
32.Momani S, Odibat Z. Numerical comparison of methods for solving linear differential equations of fractional order. Chaos, Solitons & Fractals. 2007;31(5):1248-1255
33.Saha Ray S, Bera RK. Analytical solution of the bagley torvik equation by adomian decomposition method. Applied Mathematics and Computation. 2005;168(1):398-410
34.Luchko Y, Gorenflo R. The Initial Value Problem for Some Fractional Differential Equations with the Caputo Derivatives. Berlin: Fachbereich Mathematik und Informatik, Freie Universität Berlin; 1998 Preprint Serie A 08-98
35.Torvik PJ, Bagley RL. On the appearance of the fractional derivative in the behavior of real materials. Journal of Applied Mechanics. 1984;51:294-298
36.Ji T, Hou J, Yang C. Numerical solution of the Bagley–Torvik equation using shifted chebyshev operational matrix. Adv. Difference Equ. 2020;2020(1):1-14
37.Uddin M, Ahmad S. On the numerical solution of Bagley–Torvik equation via the laplace transform. Tbilisi Mathematical Journal. 2017;10(1):279-284
38.Rehman MU, Khan RA. A numerical method for solving boundary value problems for fractional differential equations. Applied Mathematical Modelling. 2012;36(3):894-907
39.Saadatmandi A, Dehghan M. A new operational matrix for solving fractional-order differential equations. Computers & Mathematcs with Applications. 2010;59(3):1326-1336
40.Oldham K, Spanier J. The Fractional Calculus Theory and Applications of Differentiation and Integration to Arbitrary Order. New York, NY: Elsevier; 1974
41.Trujillo JJ, Scalas E, Diethelm K, Baleanu D. Fractional Calculus: Models and Numerical Methods. Vol. 5. London: World Scientific; 2016
42.Ross B. A brief history and exposition of the fundamental theory of fractional calculus. Fractional Calculus and its Applications. 1975;457:1-36
43.Tenreiro Machado J, Kiryakova V, Mainardi F. Recent history of fractional calculus. Communications in Nonlinear Science and Numerical Simulation. 2011;16(3):1140-1153
44.Baleanu D, Agarwal RP. Fractional calculus in the sky. Adv. Difference Equ., pages Paper No. 117, 9. 2021
45.Atangana A. Mathematical model of survival of fractional calculus, critics and their impact: How singular is our world? Adv. Difference Equ., pages Paper No. 403, 59. 2021
46.Hilfer R. Applications of Fractional Calculus in Physics. River Edge, NJ: World Scientific Publishing Co., Inc.; 2000
47.Atangana A, Baleanu D. New fractional derivative with non-local and non-singular kernel. Journal of Thermal Science. 2016;20(2):763-769
48.Samko SG, Kilbas AA, Marichev OI. Fractional integrals and derivatives. In: Nikolskiĭ SM, editor. Translated from the 1987 Russian original, Revised by the authorsTheory and Applications. Edited and with a foreword by. Yverdon: Gordon and Breach Science Publishers; 1993
49.Katugampola UN. New approach to a generalized fractional integral. Applied Mathematics and Computation. 2011;218(3):860-865
50.Katugampola UN. A new approach to generalized fractional derivatives. Bulletin of Mathematical Analysis and Applications. 2014;6(4):1-15
51.Atangana A. Fractional Operators with Constant and Variable Order with Application to Geo-hydrology. New York, NY: Academic Press; 2017
52.Goodwine B, Leyden K. Recent results in fractional-order modeling in multi-agent systems and linear friction welding. IFAC. 2015;48(1):380-381
53.Goodwine B. Modeling a multi-robot system with fractional-order differential equations. In: 2014 IEEE International Conference on Robotics and Automation (ICRA). Hong Kong: IEEE; 2014. pp. 1763-1768
54.Shloof AM, Senu N, Ahmadian A, Nik Long NMA, Salahshour S. Solving fractal-fractional differential equations using operational matrix of derivatives via hilfer fractal-fractional derivative sense. Applied Numerical Mathematics. 2022;178:386-403
55.Bell WW. Special Functions for Scientists and Engineers. New Jersey: Van Nostrand; 1968
56.Th Kekkeris G, Paraskevopoulos PN. Hermite series approach to optimal control. International Journal of Control. 1988;47(2):557-567
57.Kalateh BZ, Ahmadi AS, Aminataei A. Operational matrices with respect to hermite polynomials and their applications in solving linear differential equations with variable coefficients. 2013
Written By
Imran Talib and Faruk Özger
Submitted: 08 January 2023Reviewed: 01 February 2023Published: 22 March 2023
 Open access peer-reviewed chapter
Open access peer-reviewed chapter