 Open access peer-reviewed chapter
Open access peer-reviewed chapter
Abstract
The multiple advantages of the use of Unmanned Aerial Vehicle (UAV) platforms in combination with the recent research advancements in the field and the reduction of production cost for such platforms have caused an increasing interest for their use in multiple civilian applications. As the number of UAV operations in a common airspace increases, Unmanned Traffic Management (UTM) plays a crucial role in accommodating flights in a safe and systematic manner. This work looks into six categories of those applications and the relevant guidance and decision-making algorithms and methodologies to enable autonomy in their execution, as well as traffic management systems required to support them.
Keywords
- UAV
- civilian applications
- unmanned traffic management
- guidance
- autonomy
1. Introduction
Research on the use of UAVs for civilian applications has gathered a lot of interest in the last decades, as UAVs prove to be a highly useful tool for a plethora of use cases. UAVs were initially employed for military applications, responsible for a variety of missions. Their decreasing cost, high aerial mobility, and the advancements in battery technologies made UAVs highly attractive options for civilian applications as well [1]. Proposed civilian applications include agriculture, photography, shipping and delivery, disaster management, rescue operations, archeological surveys, geographic mapping, human health, livestock surveillance, safety inspection, wild-life observance, weather forecasting, emergency response, telecommunication, and border surveillance [2, 3].
UAVs present a wide variety from micro-UAVs weighing some 100 g to large UAVs weighing over 100 kg. They also differentiate by their control configuration. Some examples of UAVs with different kinematics models are presented in Figure 1. Their size and control configuration are factors that should be considered while selecting a UAV for a specific application and while designing the guidance methodology to apply.
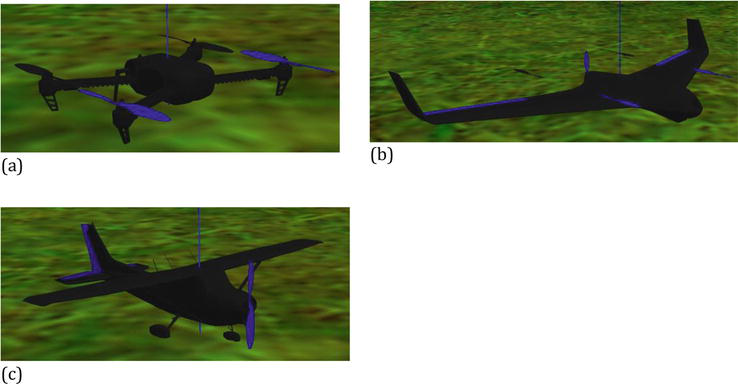
Figure 1.
Examples of UAVs in the Gazebo simulator. (a) A multirotor quadcopter, (b) A vertical take-off (VTOL), (c) A fixed-wing.
UAVs are expected to decrease the financial cost, improve performance in terms of range and completion time, and minimize human fatigue and safety risk in the operations they are involved in. Systems consisting of multiple UAVs capable of collaborating to reach a user-defined goal reduce the response time for time critical operations (e.g., search and rescue missions). Autonomy capabilities reduce the operator’s workload and enable operations with multiple UAVs. In addition, UAVs with autonomy features should lower the risks related to the performance of the human operator [4]. Fully autonomous UAVs make decisions on their missions and planning with no human intervention [1].
Four levels of autonomy for UAVs are identified in [5], from remote control to fully autonomous:
Fully autonomous: The UAV is capable of achieving its given scope and completing its mission with no human intervention while considering operational and environmental conditions.
Semi-autonomous: The UAV is capable of autonomous operation between human interactions. The mission is planned and executed by the human operator and/or the UAV.
Teleoperation: The UAV receives actuator commands or continuously updated goals by the human operator, who accesses sensory data from the vehicle.
Remote control: The UAV is continuously controlled by a human operator and only conducts Line of Sight missions.
The significant advantages and multiple applications of UAVs are expected to cause an outstanding increase in the number of UAV operations over urban and rural areas. The need for methods to manage and control increasing UAV traffic is becoming more urgent. A UTM system is responsible for supporting, monitoring, and regulating the safe and smooth incorporation of UAVs into civilian airspace. UTM systems are seen to be a part of or an addition to Air Traffic Management (ATM), which has been employed for manned aviation for decades. Research on UTM has boosted in the latest decade, with several research programs focusing on defining its requirements, describing its operations, and designing and testing its implementations.
In this chapter, a short literature review of different civilian applications of UAVs is presented, focusing on guidance algorithms designed to increase the vehicles’ autonomy capabilities in decision-making and planning to support fully autonomous operations. Recent work with guidance methods designed for specific civilian applications is presented. Additionally, an overview of proposed traffic management systems and concepts for UAVs is presented, describing their safe incorporation into civilian airspace.
2. Civilian applications
In this section guidance and decision-making paradigms based on the intended use case are described. Although different UAV applications and use cases could be formulated as well-known guidance problems (e.g., traveling salesman problem (TSP), vehicle routing problem (VRP), coverage path planning problem, etc.), each application type introduces specific constrains and optimization parameters for the guidance system. Six main civilian applications are presented: cinematography, payload delivery and shipping, agriculture, surveillance, search and rescue, and disaster and environmental monitoring.
UAV operations in [1] are separated into six categories: area coverage, search, routing for a set of locations, data gathering and recharging in wireless sensors network, allocating communication links and computing power to mobile devices, and operational aspects of a self-organizing network of drones. Most of the applications considered in this work fall into the first three categories. Figure 2 shows the relation between those three operation categories and the UAV applications studied in this work.
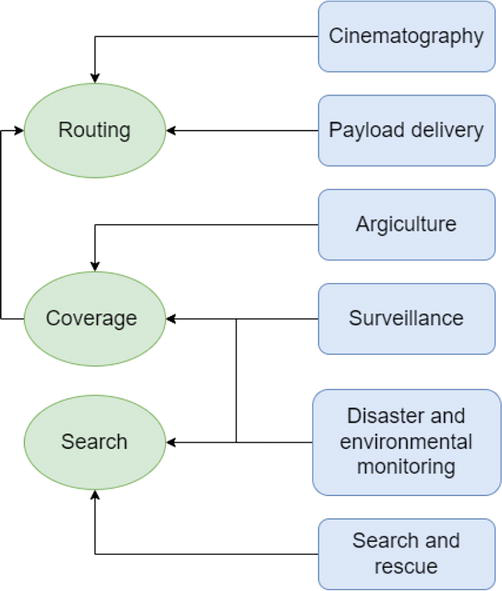
Figure 2.
Civilian application of UAVs and their relations to three common operations (routing, coverage, and search).
In area coverage operations, the UAVs must scan a specific area. In the coverage path planning problem, the UAV must design a path to cover all points of the area with its sensors. In case full area coverage is not possible, the designed path must maximize the collected information while obeying to the imposed constraints. If the area is decomposed to a grid of cells, the problem can be transformed into a traveling salesman or a vehicle routing problem. Coverage operations are applied in agriculture, surveillance, and disaster and environmental monitoring.
In search operations, the UAVs are tasked to explore an area and locate specific targets of interest with unknown locations. The operation or search area is usually partitioned into a grid of cells and cells are associated with probabilities to create a belief map on the existence of targets. The applied approach is usually optimized to minimize the time to detect the targets. Search operations include applications in search and rescue, surveillance, and disaster and environmental monitoring.
In routing operations, a set of waypoints of interest are given by the end-user or generated from another system and the UAV must design paths to visit them all while minimizing time or energy criteria. Routing operations are generally formulated as TSP or VRP problems, with multiple variations of them identified in literature. If the kinematic model of UAVs is considered the problems may be converted into Dubins-TSP or Dubins-VRP. Similarly, if multiple UAVs are cooperating to visit all locations, multi-vehicle TSP or VRP problems are defined. Additional constraints are included depending on the intended application. For example, waypoints might be coupled with specific visitation time windows, or some waypoints might need to be visited in a specified sequence. Routing operations are commonly encountered in cinematography and payload delivery.
2.1 Cinematography
Autonomous UAV cinematography offers the capture of aerial video footage from previously hard-to-reach areas, innovative visual effects and shot types, large area and multiple targets coverage, capturing a scene from multiple view angles, and cost reduction in comparison to manual shooting [6, 7]. The UAV cinematography concepts are described by the desired camera motion shot type and the desired framing shot type given by the director or human end user. The camera motion shot types define the UAV’s trajectory and are categorized into static, dynamic, target tracking, and dynamic target, depending on if the UAV is moving and if its motion directly depends on the target’s trajectory [6]. The framing shot type describes the percentage of the camera image covered by the target.
An autonomous system for cinematography including multiple UAVs consists of [8]:
A high-level planner, responsible for generating and allocating specific tasks to the system’s UAVs while considering time and resources constraints.
A path planner, responsible for generating a list of waypoints for the involved UAVs, including specification for the camera’s attitude while considering the vehicles’ safety.
A trajectory follower, responsible for guiding each UAV to execute the generated path while controlling its camera to provide the desired shot angle.
A scheduler, responsible for synchronizing the action of the above three modules.
The autonomous cinematography UAV system uses as input a high-level mission description provided by the director/human end-user. The mission description contains a set of artistic instructions including shot types, starting time and duration, positions and targets, etc.
Trajectories for cinematography UAVs must meet esthetic quality criteria in addition to constraints imposed from the UAV’s dynamics. The attitude of the UAV and camera must be planned to obtain the desired result. The trajectory planning of the UAV and the attitude control of the camera can be approached as one optimization problem or be decoupled and solved separately. A proposed method of trajectory planning for flying cameras is presented in [9]. The problem is formulated in a non-linear model predictive contouring control manner, and it is solved online in a receding horizon fashion. The formulated optimization problem includes dynamic planning and collision avoidance to smoothly guide the UAV to follow virtual rails, the desired 3D path.
By decoupling the two problems, the headings of the UAV and the camera are examined independently. A covariant gradient descent is proposed in [10] to compute the UAV’s trajectory while minimizing the cost function. The cost function includes smoothness, shot quality, occlusion, and safety metrics. A desired trajectory can be computed by formulating the problem as a constrained nonlinear optimization problem, solved in a receding horizon manner [11, 12]. This allows to minimize the required camera changes for smooth camera movement, the vehicle’s acceleration for smooth and efficient trajectory, and the distance to target to guide the vehicle towards the desired location. The UAV’s kinematic constrains and collision avoidance constrains must be added to ensure the generated trajectory is feasible and safe.
2.2 Payload delivery and shipping
Employing UAVs for package and food delivery missions is expected to minimize the delivery time and reduce the delivery costs [13]. In addition, it has the potential to decrease energy consumption and CO2 emissions [14]. A UAV based system for food delivery is presented in [15]. The buildings of the area are described in a 3D map and the A* algorithm is used to compute the shortest path from the origin to the desired delivery point.
While the path planning problem for deliveries is relatively simple to solve, this is not the case for delivery using multiple UAVs. The problem is changed into a vehicle routing problem, in which the optimal assignment of UAVs to deliveries must be computed while minimizing criteria like delivery time and energy consumption. A genetic algorithm for assigning delivery tasks to UAVs is presented in [16]. Authors in [17] approach the problem using a Mixed-Integer Linear Programming (MILP) model fitted to optimize several objectives in order to minimize delivery time and energy consumption. The UAVs collaborate to collect and deliver packages. After the routing problem has been formulated, a matheuristic method is applied to generate solutions in restricted computational time. A mixed integer programming model is presented in [18], which integrates constrains sets generated by the business logic of food delivery.
2.3 Agriculture
State-of-the-art UAV farming technologies include planting methods based on UAVs, which decreases the planting cost by up to 85% [19]. Potential UAV agriculture application include planting, crop and spot (i.e., targeted on weeds) spraying, crop monitoring, irrigation monitoring (i.e., identify areas with low soil moisture, dehydrated crops, water-logged areas), soil and environment conditions monitoring, cattle monitoring, and mustering (i.e., locating and gathering livestock animals in a large area) [20, 21, 22]. Aerial vehicles are not impacted from difficult terrain condition, frequently met in agricultural application, and they can offer high-level observing overview of the field or detailed level information over a target of interest by adjusting their flight path and altitude [23]. Research in the integration of UAV and multi-UAV systems with autonomy capabilities has boomed, due to the multiple potential applications identified and the benefits of UAVs.
A UAV system for remote sensing and multi-spectral data collection from a field is proposed in [24]. The system must plan a flight for area coverage. The waypoints of the trajectory are computed in relation to the area covered by one image collected of the UAV. The UAV moves forward and laterally and hovers over the generated waypoints to cover the area of interest in its entirety. The IDeAL system, presented in [25], uses UAVs to support Agricultural IoT. The Strip Division along Resultant Wind Flow approach is proposed as a path planning technique for area coverage over the field to minimize information loss, coverage time, path deviation due to wind, and energy consumption. The method is initialized by computing the convex hull of the field’s boundary and then a path to cover the area of the field is generated. The path computation considers optimization parameters, like travel distance, overlaps in coverage, energy consumption, the number of sharp turns, and deviation from the planned path. The area of interest is scanned by a sweeping motion of the UAV. The field is separated into strips, so that the forward UAV motion along a strip is parallel to the wind’s direction to minimize the deviation of the path due to wind.
A UAV system, capable of autonomously finding livestock in freely moving herds is presented in [21]. The UAV must search a given field and locate the animals who have unknown locations. The problem is formulated as dynamic TSP, in which the waypoints to be visited are not given preflight and the route is updated online. The problem is solved with a dual-stream deep network architecture to compute navigation commands on the grid-based flight area. Their method uses current sensory data and historic map data of the areas already explored.
A route optimization method for UAV spraying in precision agriculture is proposed in [26]. The route planning algorithm receives stressed areas, requiring spraying and generates a UAV flight plan to cover those regions. The given regions may be of irregular shapes and sizes. Their method uses the convex hull of the stressed areas and creates Voronoi diagrams to compute the optimal spray waypoints, depending on the radius of the spray. After the set of waypoints to be visited has been identified, the problem can be formulated as TSP to compute the shortest path visiting all the waypoints. A variation of TSP is used, called clustered TSP. Clustered TSP is defined for optimizing a route visiting waypoints clustered into different groups based on their location. This solution fits well the described spraying problem, as the computed waypoints are clustered based on their corresponding stress region. Specific constraints are added to the obstacle avoidance problem for agricultural spraying UAVs. Sprayer UAVs have a heavier payload, as they must carry the spraying liquid. The spraying process must cover the desired area and coverage optimization should be considered in the selection of an obstacle avoidance approach. An overview of obstacle detection and avoidance methods for this application is provided in [27]. Six families of real-time collision avoidance algorithms are considered for agricultural spraying UAVs: bug algorithms, Artificial Potential Field (APF), collision cone, fuzzy logic, Vector Filed Histogram (VFH), and Neural Networks (NN). Bug, APF and collision cone algorithms are simple to implement and do not create a heavy computational load pre-flight or during flight. Fuzzy logic and NN systems require training or learning with large computational cost and their performance and capability of generalization depends on the training data. VFH algorithms have high computational needs and do not consider the vehicle’s dynamics.
Using multi-UAV systems to cooperatively execute agriculture tasks increases the accuracy and efficiency of the system. A distributed swarm control algorithm for agriculture operation is introduced in [28]. Each UAV of the swarm is controlled by three control inputs: (1) the UAV control, guiding the vehicle to the desired position, (2) the formation control, responsible for maintaining the desired inter-vehicle distances in order to maintain their communication’s connectivity while preventing inter-vehicle collisions, and (3) the obstacle avoidance control, responsible for avoiding collisions with static obstacles. The formation and obstacle avoidance control inputs are computed using artificial potential functions to generate repulsive and attractive actions for the formation control and solely repulsive actions for the obstacle avoidance control. A multi-UAV system for farmland inspections is presented in [29]. They use an on-the-fly autonomous path planning algorithm able to consider information on the strategic, tactical, and operational level. On the strategic level the algorithm considers the end-user specific mission description. On the tactical level the UAV is capable of deciding to modify its path based on new information, collected by its sensors or received from another cooperating vehicle, during the mission execution. The local path is computed at the operational level, to generate safe, feasible and efficient control commands.
2.4 Surveillance
Surveillance applications require repeated coverage of the area of interest, as the monitored phenomenon is dynamic. The full area should be monitored, and the selected methods should minimize the maximum time between visits in the same region [30]. A single- and a multi-UAV method for surveillance and modification suggestions to integrate dynamic and endurance constraints are presented in [31]. The area is decomposed into a grid and each cell is assigned an age value, corresponding to the time elapsed from its most recent scanning. The next cell to be visited is selected using a control policy based on the ages of all the cells.
Surveillance procedures in urban environments impose specific constraints, as the increased density of high buildings creates multiple occlusion cases for the UAV’s sensors. An occlusion-aware approach for UAV surveillance in cities is proposed in [32]. The surveillance task is formulated as a 3D Art Gallery Problem and solved with an approximation approach to define a set of waypoints that must be visited for full coverage. The path planning problem, to connect all computed waypoints is defined as a Dubins-TSP and the spiral and alternating algorithms are used to compute an optimal solution. Another approach of computing the set of waypoints for full coverage is to discretize the target area and use a genetic algorithm to select the required waypoints [33]. The UAVs’ paths are computed using the Ant Colony System (ACS) method, fitted with piecewise cubic Bezier curves to generate smooth and feasible paths.
A cooperative surveillance strategy, with connectivity constraints, for a heterogenous team of UAVs is presented in [34]. The decentralized algorithm implements area partitioning for irregular, urban areas by creating sub-areas each assigned to one UAV. The coverage paths are computed to minimize the maximum time between two sequential visits of an area and the maximum time to disseminate collected data within the system.
A distributed multi-agent deep reinforcement learning-based algorithm for surveillance of a set of known targets is introduced in [35]. Energy consumption in addition to surveillance performance optimizations are considered.
2.5 Search and rescue
Search and rescue (SAR) missions are highly time critical [36], as the survivability of the victims decreases with time. For this reason, multi-UAV, collaborative search operations are proposed.
A centralized planning algorithm for multi-UAV collaboration for search and rescue missions, called layered search and rescue (LSAR) algorithm, is described in [37]. LSAR is based on the assumption that the survivors’ distribution is denser closer to the center of a disaster and survivors closer to the disaster have a higher rescue priority. The disaster area is divided into regions with different sizes, regions closer to the disaster center have smaller areas than regions more distant to the center. UAVs are assigned to regions prioritizing regions closer to the center, while covering the maximum number of regions.
The search area is described in a grid representation for most SAR implementations, and each cell of the grid corresponds to one single-UAV task. That allows to reformulate the search problem as a multi-UAV task allocation (MUTA) problem. A bio-inspired algorithm, based on the foraging behavior of fish when searching for food, for multi-UAV search and rescue missions is proposed in [38]. The UAVs are divided into groups, representing schools of fish, where each group has one UAV leader. The group’s leader selects the next search region for its group. Follower UAVs search grid cells in the region indicated by their leader. Follower UAVs have a forgetfulness feature, allowing them to abandon their leader and join another UAV group or create a new group, if the UAV’s performance on discovering survivors is low.
Another example of bio-inspired algorithms for SAR is shown in [39]. A multi-UAV system, based on the locust behavior when searching for food sources is proposed. In the search phase of the mission, during which there is no a-priori information on the location of the survivors, UAVs act as locusts in their solitary phase and spread on the disaster area, selecting area regions not assigned to another UAV. UAVs in the search phase are distinguished into scout UAVs, who are greatly repelled by each other and only select regions unassigned to other scouts, and eagle UAVs, who explore unassigned grid cells in the average locations of other UAVs. In the rescue phase, designed for more detailed exploration of areas, UAVs act as locusts in their gregarious phase and are attracted to regions depending on the number of detected survivors in each region. A similar idea, for assigning social and antisocial behaviors to UAVs for SAR mission is explored in [40]. Antisocial searcher UAVs are guided far away from each other, spreading the swarm in the search area. On the other hand, social search UAVs are responsible for exhaustive local area search in the locations of discovered survivors.
Search paths in [41] are planned for multiple UAVs in a centralized manner using a genetic algorithm to optimize the coverage and the connectivity of the system to the base station, minimizing the sum of time to detect a victim and the time to inform the base station. Authors in [42] used a hexagonal decomposition to generate a grid map and a graph in the search area. A centralized and pre-flight mixed-integer linear programming model is proposed to solve the multi-UAV coverage path planning and achieve full coverage of the graph in minimum time.
A grid-based representation for the area can also be used to create a belief map, containing the probability of finding a survivor in each cell of the grid. A variety of approaches have been found suitable for solving the MUTA problem for SAR operations with belief map, like methods in the family of greedy heuristics, potential fields, and partially Observable Markov Decision Processes [43]. An adaptive memetic algorithm is proposed in [44] for solving the single-UAV search problem with a belief map. The algorithm adaptively selects from six different local search procedures, which are utilized to narrowly modify the solutions in an attempt to improve their fitness and diversity, based on the procedure’s performance in previous generations. A coordinated Monte Carlo tree search algorithm is presented in [45]. Their implementation is decentralized and factors belief data into the decision-making process.
2.6 Disaster and environmental monitoring
Disaster and environmental monitoring applications provide a variety of solutions depending on the phenomenon they are designed to investigate. For highly dynamic situations, time is critical and obtaining a good estimation of the location and magnitude of the phenomenon in a short time is preferred over acquiring a complete image of the area in a longer time.
In time-sensitive disasters like oil spillage and wildfires, UAVs must explore the area to identify the location and borders of the disaster in minimum time and a complete area scan is not required. A decentralized methodology for mapping off-shore oil spill using a team of UAVs, called PSOil, is introduced in [46]. The search area is discretized into a grid of cells and a belief map is constructed, representing the likelihood of discovering oil in a cell. The PSOil algorithm uses the swarm dynamics of the Particle Swarm Optimization (PSO) algorithm. Three mapping phases are proposed; a scouting phase for randomly exploring the area to discover oil, an aggressive oil spill mapping phase in which the agents select their next target cell using local and global data, and a boundary tracking phase to define the exact oil spill boundaries using the Moore Neighborhood tracing algorithm.
A bio-inspired and decentralized algorithm based on the Oxyrrhis Marina behavior for locating food sources has been proposed for identifying forest fire locations [47]. The method includes two phases: an exploring phase during which the UAV executes a Levy flight, and a mapping phase during which the UAV uses Brownian search based on the temperature change it senses. The proposed system is enhanced by a dynamic formation control for guiding the firefighting UAVs to a non-overlapping formation. A leader-follower coalition formation approach for wildfire monitoring using a heterogenous swarm of UAVs is proposed in [48]. Coalition leaders decompose their assigned observance regions into single-UAV tasks and the tasks are assigned to UAVs as coalition followers using a distributed, bid-response negotiation process. Firefighting UAVs utilizing a modified PSO algorithm and the temperature readings of their sensors in a decentralized swarm are shown in [49]. PSO was adapted to handle dynamic environments.
Full area coverage is used for static or slow-changing phenomena. Commonly, coverage paths are designed by decomposing the monitored area into cells with techniques like the vertical cell, trapezoidal or boustrophedon decomposition and sequentially sweeping all created cells [50]. A major concern for mapping missions is the mission duration, as the areas of interest may be extensive and full coverage paths may be longer than the UAV’s endurance. One proposed solution to this problem is to separate the area into regions, each corresponding to a single-UAV task. Authors in [51] created regions sized to the energy autonomy of one vehicle by discretizing the area, to be scanned, into a grid of cells and clustering obstacle-free cells using the k-means clustering algorithm. The coverage path is computed using a depth-first search algorithm on the cells of the assigned region. Their solution assumed multiple UAVs or recharging breaks between tasks.
If the power autonomy of a UAV is not sufficient for full area coverage, sub-optimal trajectories to cover the maximum area, while obeying to the energy constraint, must be designed. A Voronoi-based path generation (VPG) algorithm is used in [52] to plan coverage paths under energy constraints for environmental monitoring applications. The VPG algorithm is described as a repetitive process to generate the path’s waypoints, satisfy energy consumption limitations and are optimized to provide the maximum and more spread coverage of the area. The path’s waypoints are initialized randomly, a Voronoi diagram is created based on their positions, and the centroids of the Voronoi polygons are computed. Then, the path is modeled as a chained mass-spring-damper system, with the waypoints representing masses and springs connecting waypoints to the centroids, in order to compute the updated waypoint positions at each repetition of the algorithm.
3. Unmanned traffic management architectures
The multiple identified UAV applications in civilian use cases create the need for the definition of management systems to enable the safe conduction of various autonomous operations in common airspace. Safety, security, and economic factors must be considered when designing a concept for large scale UAV operations [53].
The design of traffic management systems for UAVs takes inspiration from the years-long experience and knowledge in ATM systems, used for manned aviation. However, it is important to identify the different requirements and characteristics of manned and unmanned missions. UAV missions will be shorter and more numerous in comparison to manned flights. In addition, UAVs will have to navigate in more congested environments and integrate a higher level of autonomy. The co-existence of manned and unmanned flights must be taken into heavy consideration, as it is crucial to ensure that manned aviation will not be impacted by the introduction of a high number of UAVs in the airspace.
In 2013, NASA initiated the Unmanned Aerial System (UAS) Traffic Management research initiative to support safe and efficient low-altitude airspace operations for unmanned vehicles [54]. The FAA has published two Concepts of Operations (ConOps) for UTM, a first version in 2018 [55] and a second one in 2020 [56], based on which UTM should include a set of federated services to support UAS operations and ensure that are authorized, safe, secure, and equitable in terms of airspace access. Those ConOps focus on UTM operations below 400 feet above ground level. The proposed services include flight planning, communications, separation, weather, registration, authorization, and mapping services. Performance and airspace authorizations shall be conducted to assess the operators and equipment’s capabilities, and inform ATM stakeholders of UTM operations. UAVs and operators shall be identified. The safety of the operations is ensured through multiple layers of separation: strategic traffic management during pre-flight planning, separation provision using conflict alerts and deconfliction services in a tactical level, contingency management to respond to flight anomalies, real-time collision avoidance using ground-based or onboard equipment, and near real-time notifications and advisories based on airspace constraints.
In 2018, the EU’s SESAR Joint Undertaking (SJU) published a blueprint [57], describing its vision for U-space. U-space encompasses a wide range of services to ensure the smooth operation of drones for all types of missions in all operating environments, focusing on very low level airspace. U-space services will be enhanced as the autonomy capabilities of UAVs evolve. Three foundation services are proposed for U-space: electronic registration (e-registration), electronic identification (e-identification), and geofencing (i.e. defined zones in which UAV operations are not allowed). ConOps for UAV operation in U-space have been developed from the CORUS project [58].
ConOps envisioned both in the USA and EU highlight the necessity for integrating unmanned air traffic into ATM. It is crucial that the developed concepts for UAV operations do not impact manned aviation operations. Furthermore, both concepts signify the safety aspects of the airspace, describing separation methods, like strategic and tactical deconfliction and collision avoidance [59]. Figure 3 depicts the logic commonly followed to safely plan and conduct UAV flights in a UTM system. In the pre-flight stage the system receives the desired flight information and generates a flight plan. The flight is deconflicted with other known flights registered and generated in the system. If conflicts are detected during flight, they are resolved in a tactical manner. The imposed airspace structure and rules are consolidated through all stages.
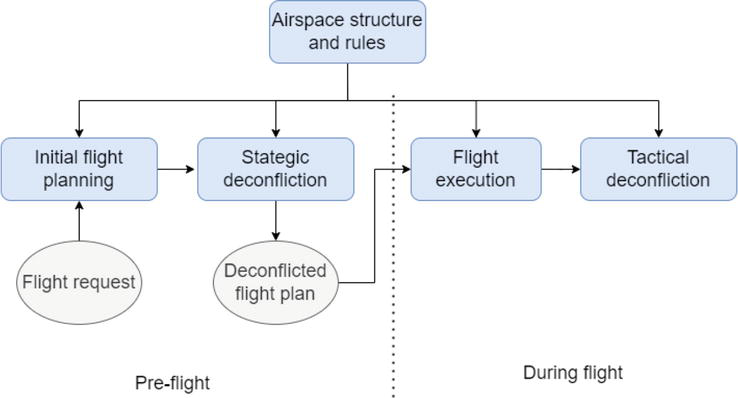
Figure 3.
Flight planning and deconfliction logic.
As the number of UAV operations will increase, so will the traffic density and complexity in the airspace. To safely support high numbers of flights, the airspace shall be structured including a set of local airspace rules. Urban topography, like buildings, shall be considered when designing a UTM network [60]. Layer concepts have been proposed to integrate different flight rules depending on the flight’s altitude [61]. The layers, zones and tubes concepts were proposed in the Metropolis project to separate and organize UAV traffic [62]. The layers concept vertically separates traffic based on heading. In the zones concept, circular and radial zones are designed in the horizontal plane inspired by ring roads around cities. The tubes concept structures traffic in both the horizontal and vertical planes, generating a 3D directional graph.
Strategic conflict management is linked to flight planning, as it acts pre-flight to detect and resolve possible conflicts for the requested flights. Flight plans are usually described as 4D trajectories. Flight planning consists of two steps; a path planning phase designs the initial UAV’s trajectory, and a strategic deconfliction phase modifies the trajectory in space and/or in time to ensure the safety of the flights. In [63], two flight type operations are considered; area operations are repetitive, while linear operations are point-to-point missions and are executed once. Flights are assumed to retain a static altitude. The airspace is discretized into a 3D grid. Routes for linear flights are generated using the A* algorithm and timestamps are added based on the UAV’s velocity, while the area operations occupy regions. A First-Come, First-Served (FCFS) approach is used for flight deconfliction and for each added planned flight, cells of the grid appear occupied for specific timestamps to the ones planned after. The FCFS approach is augmented by an optimization model with mixed integer linear programming to minimize flight delays. Authors in [60] approach the strategic deconfliction problem differently. Flights are planned as no other traffic exists in the airspace and are deconflicted by adjusting their departure time or rejecting flights if an appropriate departure time cannot be found. A genetic evolutionary algorithm is used to compute the scheduling of the flights to minimize conflicts and their delay.
Tactical conflict management is responsible for detecting and resolving conflicts during the flight. Airspace services are used to communicate the positions and velocities of nearby UAVs, to act as input to the tactical conflict management system. An iterative geometric approach is used in [64] for tactical deconfliction by separating the multi-conflict problem into simpler sub-problems in a 4D grid. Potential conflicts are detected using the well-known velocity obstacle geometric method in [65] and conflicts are resolved by adjusting the heading of the UAVs. A MILP technique is proposed to compute the new headings for UAVs with the same speed, and a stochastic parallel gradient descent based method is used for UAVs with unequal speeds. Intent information, describing the designed trajectory of each UAV, can be incorporated into the velocity obstacle representation to make conflict detection in earlier time [66].
Not all missions in the airspace are expected to have the same priority. Some missions, like medical aid or security applications, might be defined as emergency and their arrival delay is more critical than others. Even for normal (i.e., not emergency) missions time constraints may vary. For example, the arrival delay of a food delivery mission is more impactful than the one of a generic package delivery. In addition to time constraints, some missions are coupled with area constraints. For example, a surveillance mission must not deviate from a specific path, or its scope will not be met. Priority should be taken into account when planning flights [67]. Priority information can be integrated in conflict resolution by forcing lower priority flights to resolve potential conflicts [68]. Allocating the responsibility of deconfliction to lower priority flights increases the efficiency of higher priority flights in comparison to the systems where the deconfliction responsibility is shared.
4. Conclusions
Six types of civilian application of UAVs are presented in this work. Proposed guidance and decision-making methods to enhance UAV autonomy in each of those applications are presented. While each application type does not globally correspond to one type of problem, operations in the same application area share restrictions and limitations imposed by the main objective of their application. The civilian applications are followed by an overview of unmanned traffic management systems, required to enable those operations.
Cinematography applications create specific restrictions on the UAV’s trajectory planning, as the camera model inserts additional constraints to take into account the viewpoint and potential occlusions of the target. UAVs are equipped with high-end optical cameras and must generate smooth trajectories for visually appealing results. Payload delivery missions shall be cost efficient, be capable of carrying payloads of varying weights and be designed to heavily consider battery constraints. Shipping systems are designed to serve multiple orders and the multi-UAV system should have efficient coordination. UAV applications in agriculture require the full coverage of fields for a variety of tasks. For some specific tasks (e.g., spraying) the UAVs must carry heavy payloads, which add constraints to the planning. Surveillance missions are often applied in environments with dynamic targets, requiring repetitive area monitoring. The potential operational environment shows a wide range from urban congested environments to rural. Grid-based area partitioning is a common approach for surveillance applications, since it allows to easily monitor the age (i.e., time elapsed from last visit) of the grid’s cells. Search and rescue operations are the most time-critical missions, so that the survivability of the victims is increased. Disaster and environmental mapping missions may have to cover quite large areas and the desired full coverage is not always possible. The UAVs must conduct feasible trajectories that maximize the amount of useful coverage data. Grid maps are often implemented in search and rescue and disaster and environmental monitoring missions to create belief maps and increase the probability of gathering profitable information.
The need for systems to monitor and manage UAV traffic has become clear and numerous programs have been initiated for that purpose. The US and EU have recognized the importance of creating a framework for the integration of UAVs in the airspace in a regulated manner. UTM services must be selected to ensure safe, secure, efficient, and equal access to the airspace. Structuring the airspace allows to manage the density and complexity of traffic. Safe flights are designed with multiple levels of deconfliction to minimize the risk of an intervehicle collision.
References
- 1.
Otto A, Agatz N, Campbell J, Golden B, Pesch E. Optimization approaches for civil applications of unmanned aerial vehicles (UAVs) or aerial drones: A survey. Networks. 2018; 72 :411-458. DOI: 10.1002/net.21818 - 2.
Nawaz H, Ali H-M, Massan S-U-R. Applications of unmanned aerial vehicles: A review. 3C Tecnología. Glosas de innovación aplicadas a la pyme. 2019:85-105. DOI: 10.17993/3ctecno.2019.specialissue3.85-105 - 3.
Mualla Y, Najjar A, Daoud A, Galland S, Nicolle C, Yasar A-U-H, et al. Agent-based simulation of unmanned aerial vehicles in civilian applications: A systematic literature review and research directions. Future Generation Computer Systems. 2019; 100 :344-364. DOI: 10.1016/j.future.2019.04.051 - 4.
Watkins S, Burry J, Mohamed A, Marino M, Prudden S, Fisher A, et al. Ten questions concerning the use of drones in urban environments. Building and Environment. 2020; 167 . DOI: 10.1016/j.buildenv.2019.106458 - 5.
Huang H-M. Autonomy Levels for Unmanned Systems (ALFUS) Framework, Volume I: Terminology, Version 2.0. National Institute of Standards and Technology. Gaithersburg, MD, US; 2008 - 6.
Mademlis I, Nikolaidis N, Tefas A, Pitas I, Wagner T, Messina A. Autonomous UAV cinematography: A tutorial and a formalized shot-type taxonomy. ACM Computing Surveys. 2019; 52 :5. DOI: 10.1145/3347713 - 7.
Mademlis I, Mygdalis V, Nikolaidis N, Pitas I. Challenges in autonomous UAV cinematography: An overview. In: Proceedings of the 2018 IEEE International Conference on Multimedia and Expo (ICME) . San Diego. NY, US: IEEE; 23-27 July 2018 - 8.
Torres-Gonzalez A, Capitan J, Cunha R, Mademlis I. A multidrone approach for autonomous cinematography planning. In: ROBOT 2017: Third Iberian Robotics Conference. Sevilla, Spain. Cham, Switzerland: Springer; 22-24 November 2017 - 9.
Nageli T, Meier L, Domahidi A, Alonso-Mora J, Hilliges O. Real-time planning for automated multi-view drone cinematography. ACM Transactions on Graphics. 2017; 36 (4):1-10. DOI: 10.1145/3072959.3073712 - 10.
Bonatti R, Wang W, Ho C, Ahuja A, Gschwindt M, Camci E, et al. Autonomous aerial cinematography in unstructured environments with learned artistic decision-making. Journal of Field Robotics. 2020; 37 (4):606-641. DOI: 10.1002/rob.21931 - 11.
Sabetghadam B, Alcántara A, Capitán J, Cunha R, Ollero A, Pascoal A. Optimal trajectory planning for autonomous drone cinematography. In: Proceedings of the 2019 European Conference on Mobile Robots (ECMR). Prague; NY, US: IEEE; 04-06 September 2019 - 12.
Alcántara A, Capitán J, Cunha R, Ollero A. Optimal trajectory planning for cinematography with multiple Unmanned aerial vehicles. Robotics and Autonomous Systems. 2021; 140 . DOI: 10.1016/j.robot.2021.103778 - 13.
Iranmanesh S, Raad R, Raheel M-S, Tubbal F, Jan T. Novel DTN mobility-driven routing in autonomous drone logistics networks. IEEE Access. 2020; 8 :13661-13673. DOI: 10.1109/ACCESS.2019.2959275 - 14.
Figliozzi M-A. Carbon emissions reductions in last mile and grocery deliveries utilizing air and ground autonomous vehicles. Transportation Research Part D: Transport and Environment. 2020; 85 . DOI: 10.1016/j.trd.2020.102443 - 15.
Li B-Y, Lin H, Samani H, Sadler L, Gregory T, Jalaian B. On 3D autonomous delivery systems: Design and development. In: Proceedings 2017 International Conference on Advanced Robotics and Intelligent Systems (ARIS). Taipei, Taiwan: IEEE; 06-08 September 2017. DOI: 10.1109/ARIS.2017.8361592 - 16.
San K-T, Lee E-Y, Chang Y-S. The delivery assignment solution for swarms of UAVs dealing with multi-dimensional chromosome representation of genetic algorithm. In: Proceedings 2016 IEEE 7th Annual Ubiquitous Computing, Electronics & Mobile Communication Conference (UEMCON). New York, NY, USA: IEEE; 20-22 October 2016. DOI: 10.1109/UEMCON.2016.7777839 - 17.
Coelho B-N, Coelho V-N, Coelho I-M, Ochi L-S, Haghnazar R, Zuidema D, et al. A multi-objective green UAV routing problem. Computers & Operations Research. 2017; 88 :306-315. DOI: 10.1016/j.cor.2017.04.011 - 18.
Liu Y. An optimization-driven dynamic vehicle routing algorithm for on-demand meal delivery using drones. Computers & Operations Research. 2019; 111 :1-20. DOI: 10.1016/j.cor.2019.05.024 - 19.
Yinka-Banjo C, Olasupo A. Sky farmers: Applications of Unmanned Aerial Vehicle (UAV) in agriculture. In: Dekoulis G, editor. Autonomous Vehicles. London, UK: IntechOpen; 2019. DOI: 10.5772/intechopen.89488 - 20.
Kislaya A. An autonomous UAV for pesticide spraying. International Journal of Trend in Scientific Research and Development. 2019; 3 :986-990. DOI: 10.31142/ijtsrd23161 - 21.
Andrew W, Greatwood C, Burghardt T. Aerial animal biometrics: Individual Friesian cattle recovery and visual identification via an autonomous UAV with onboard deep inference. In: Proceedings 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). NY, US: IEEE; 03-08 November 2019. DOI: 10.1109/IROS40897.2019.8968555 - 22.
Aslan M-F, Durdu A, Sabanci K, Ropelewska E, Gültekin S-S. A comprehensive survey of the recent studies with UAV for precision agriculture in open fields and greenhouses. Applied Sciences. 2022; 12 :3. DOI: 10.3390/app12031047 - 23.
Vroegindeweij B, Wijk S, Van Henten E-J. Autonomous unmanned aerial vehicles for agricultural applications. In: Proceedings International conference of Agricultural Engineering. Zurich. 06-11 July 2014 - 24.
Xiang H, Tian L. Development of a low-cost agricultural remote sensing system based on an autonomous unmanned aerial vehicle (UAV). Biosystems Engineering. 2011; 108 (2):174-190. DOI: 10.1016/j.biosystemseng.2010.11.010 - 25.
Debarpan B, Sudip M, Nidhi P, Anandarup M. IDeAL: IoT-based autonomous aerial demarcation and path planning for precision agriculture with UAVs. ACM Transactions on Internet of Things. 2020; 1 (3):1-21. DOI: 10.1145/3379930 - 26.
Srivastava K, Pandey P-C, Sharma J-K. An approach for route optimization in applications of precision agriculture using UAVs. Drones. 2020; 4 (3):58. DOI: 10.3390/drones4030058 - 27.
Ahmed S, Qiu B, Ahmad F, Kong C-W, Xin H-A. State-of-the-art analysis of obstacle avoidance methods from the perspective of an agricultural sprayer UAV’s operation scenario. Agronomy. 2021; 11 :6. DOI: 10.3390/agronomy11061069 - 28.
Ju C, Son H-I. Multiple UAV systems for agricultural applications: Control, implementation, and evaluation. Electronics. 2018; 7 :9. DOI: 10.3390/electronics7090162 - 29.
Doering D, Benenmann A, Lerm R, de Freitas E-P, Muller I, Winter J, et al. Design and optimization of a heterogeneous platform for multiple UAV use in precision agriculture applications. IFAC Proceedings Volumes. 2014; 47 (3):12272-12277. DOI: 20140824-6-ZA-1003.02261 - 30.
Nigam N. The multiple Unmanned air vehicle persistent surveillance problem: A review. Machines. 2014; 2 (1):13-72. DOI: 10.3390/machines2010013 - 31.
Nigam N, Bieniawski S, Kroo I, Vian J. Control of multiple UAVs for persistent surveillance: Algorithm and flight test results. IEEE Transactions on Control Systems Technology. 2012; 20 (5):1236-1251. DOI: 10.1109/TCST.2011.2167331 - 32.
Semsch E, Jakob M, Pavlicek D, Pechoucek M. Autonomous UAV surveillance in complex urban environments. In: Proceedings 2009 IEEE/WIC/ACM International Joint Conference on Web Intelligence and Intelligent Agent Technology. NY, US: IEEE; 15-18 September 2009. DOI: 10.1109/WI-IAT.2009.132 - 33.
Geng L, Zhang Y-F, Wang J-J, Fuh J-Y-H, Teo S-H. Mission planning of autonomous UAVs for urban surveillance with evolutionary algorithms. In: Proceedings 2013 10th IEEE International Conference on Control and Automation (ICCA); NY, US: IEEE; 12-14 June 2013. DOI: 10.1109/ICCA.2013.6564992 - 34.
Acevedo J-J, Arrue B-C, Diaz-Bañez J-M, Ventura I, Maza I, Ollero A. One-to-one coordination algorithm for decentralized area partition in surveillance missions with a team of aerial robots. Journal of Intelligent & Robotic System. 2014; 74 :269-285. DOI: 10.1007/s10846-013-9938-z - 35.
Yun W-J, Park S, Kim J, Shin M, Jung S, Mohaisen D, et al. Cooperative multiagent deep reinforcement learning for reliable surveillance via autonomous multi-UAV control. IEEE Transactions on Industrial Informatics. 2022; 18 (10):7086-7096. DOI: 10.1109/TII.2022.3143175 - 36.
Scherer J, Yahyanejad S, Hayat S, Yanmaz E, Vukadinovic V, Andre T, et al. An autonomous multi-UAV System for search and rescue. In: Proceedings of the First Workshop on Micro Aerial Vehicle Networks, Systems, and Applications for Civilian Use . NY, USA: Association for Computing Machinery; May 2015. DOI: 10.1145/2750675.2750683 - 37.
Alotaibi ET, Alqefari SS, Koubaa A. LSAR: Multi-UAV collaboration for search and rescue missions. IEEE Access. 2019; 7 :55817-55832. DOI: 10.1109/ACCESS.2019.2912306 - 38.
Alhaqbani A, Kurdi H, Youcef-Toumi K. Fish-inspired task allocation algorithm for multiple Unmanned aerial vehicles in search and rescue missions. Remote Sensing. 2021; 13 :1. DOI: 10.3390/rs13010027. - 39.
Kurdi H, How J, Bautista G. Bio-inspired algorithm for task allocation in multi-UAV search and rescue missions. In: Proceedings AIAA Guidance, Navigation, and Control Conference. Virginia, US: American Institute of Aeronautics and Astronautics, Inc; 04-08 January 2016; DOI: 10.2514/6.2016-1377 - 40.
Arnold R, Jablonski J, Abruzzo B, Mezzacappa E. Heterogeneous UAV multi-role swarming Behaviors for search and rescue. In: Proceedings 2020 IEEE Conference on Cognitive and Computational Aspects of Situation Management (CogSIMA). NY, US: IEEE; 24-29 August 2020. DOI: 10.1109/CogSIMA49017.2020.9215994 - 41.
Hayat S, Yanmaz E, Brown TX, Bettstetter C. Multi-objective UAV path planning for search and rescue. In: Proceedings 2017 IEEE International Conference on Robotics and Automation (ICRA). NY, US: IEEE; 29 May-03 June 2017. DOI: 10.1109/ICRA.2017.7989656 - 42.
Cho S-W, Park J-H, Park H-J, Kim S. Multi-UAV coverage path planning based on hexagonal grid decomposition in maritime search and rescue. Mathematics. 2022; 10 :1. DOI: 10.3390/math10010083 - 43.
Waharte S, Trigoni N. Supporting search and rescue operations with UAVs. In: Proceedings 2010 International Conference on Emerging Security Technologies; NY, US: IEEE; 06-07 September 2010. DOI: 10.1109/EST.2010.31 - 44.
Hong L, Wang Y, Du Y, Chen X, Zheng Y. UAV search-and-rescue planning using an adaptive memetic algorithm. Frontiers of Information Technology & Electronic Engineering. 2021; 22 :1477-1491. DOI: 10.1631/FITEE.2000632 - 45.
Baker C, Ramchurn G, Teacy L, Jennings N. Planning search and rescue missions for UAV teams. In: Proceedings European Conference on Artificial Intelligence. The Hague, The Netherlands. NY, USA: Association for Computing Machinery; 29 August- 02 September 2016; . DOI: 10.3233/978-1-61499-672-9-1777 - 46.
Odonkor P, Ball Z, Chowdhury S. Distributed operation of collaborating unmanned aerial vehicles for time-sensitive oil spill mapping. Swarm and Evolutionary Computation. 2019; 46 :52-68. DOI: 10.1016/j.swevo.2019.01.005 - 47.
Harikumar K, Senthilnath J, Sundaram S. Multi-UAV Oxyrrhis Marina-inspired search and dynamic formation control for Forest firefighting. IEEE Transactions on Automation Science and Engineering. 2019; 16 (2):863-873. DOI: 10.1109/TASE.2018.2867614 - 48.
Afghah F, Razi A, Chakareski J, Ashdown J. Wildfire monitoring in remote areas using autonomous Unmanned aerial vehicles. In: Proceedings IEEE INFOCOM 2019 - IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS). NY, US: IEEE; 29 April- 02 May 2019. DOI: 10.1109/INFCOMW.2019.8845309 - 49.
Innocente MS, Grasso P. Self-organising swarms of firefighting drones: Harnessing the power of collective intelligence in decentralised multi-robot systems. Journal of Computational Science. 2019; 34 :80-101. DOI: 10.1016/j.jocs.2019.04.009 - 50.
Yildirim O, Vural RA, Diepold K. Improving coverage method of autonomous drones for environmental monitoring. Turkish Journal of Electrical Engineering and Computer Sciences. 2022; 28 :6. DOI: 10.3906/elk-1912-107 - 51.
Abd Rahman NA, Sahari KSM, Hamid NA, Hou YC. A coverage path planning approach for autonomous radiation mapping with a mobile robot. International Journal of Advanced Robotic Systems. 2022; 19 :4. DOI: 10.1177/17298806221116483 - 52.
Jensen-Nau KR, Hermans T, Leang KK. Near-optimal area-coverage path planning of energy-constrained aerial robots with application in autonomous environmental monitoring. IEEE Transactions on Automation Science and Engineering. 2021; 18 (3):1453-1468. DOI: 10.1109/TASE.2020.3016276 - 53.
Kopardekar P, Rios J, Prevot T, Johnson M, Jung J, Robinson J. Unmanned Aircraft System Traffic Management (UTM) concept of operations. In: Proceedings AIAA Aviation and Aeronautics Forum (Aviation 2016). Virginia, US: American Institute of Aeronautics and Astronautics, Inc.; US. 13-17 June 2016 - 54.
Kopardekar P. Unmanned Aerial System (UAS) Traffic Management (UTM): Enabling Low-Altitude Airspace and UAS Operations. California: Ames Research Center, Moffett Field; 2014 - 55.
Bradford S. Unmanned aircraft system (UAS) Traffic Management (UTM) concept of Operations v1.0. Federal Aviation Administration; 2018 - 56.
Whitley P. Unmanned Aircraft System (UAS) Traffic Management (UTM) concept of Operations v2.0. Federal Aviation Administration; 2020 - 57.
SESAR Joint Undertaking. U-space Blueprint 2017 - 58.
Barrado C, Boyero M, Brucculeri L, Ferrara G, Hately A, Hullah P, et al. U-space concept of operations: A key enabler for opening airspace to emerging low-altitude operations. Aerospace. 2020; 7 :3. DOI: 10.3390/aerospace7030024 - 59.
Lieb J, Volkert A. Unmanned aircraft systems traffic management: A comparison on the FAA UTM and the European CORUS ConOps based on U-space. In: Proceedings 2020 AIAA/IEEE 39th Digital Avionics Systems Conference (DASC); 11-15 October 2020; San Antonio, TX, USA. DOI: 10.1109/DASC50938.2020.9256745 - 60.
Tan Q , Wang Z, Ong Y-S, Low K-H. Evolutionary optimization-based mission planning for UAS Traffic Management (UTM). In: Proceedings 2019 International Conference on Unmanned Aircraft Systems (ICUAS). Atlanta, GA, USA. 2019. DOI: 10.1109/ICUAS.2019.8798078 - 61.
Bauranov A, Rakas J. Designing airspace for urban air mobility: A review of concepts and approaches. Progress in Aerospace Sciences. 2021:125. DOI: 10.1016/j.paerosci.2021.100726 - 62.
Sunil E, Hoekstra J, Ellerbroek J, Bussink F, Nieuwenhuisen D, Vidosavljevic A, et al. Metropolis: Relating airspace structure and capacity for extreme traffic densities. In: Proceedings ATM Seminar 2015, 11th USA/EUROPE Air Traffic Management R&D Seminar, FAA & Eurocontrol. Lisboa, Portugal. June 2015 - 63.
Tang Y, Xu Y, Inalhan G. Incorporating optimisation in strategic conflict resolution service in U-space. In: Proceedings 11th SESAR Innovation Days; 07-09 December 2021; Virtual Event - 64.
Acevedo JJ, Capitán C, Capitiin J, Castaño AR, Ollero A. A Geometrical Approach based on 4D grids for conflict management of multiple UAVs operating in U-space. In: Proceedings 2020 International Conference on Unmanned Aircraft Systems (ICUAS). NY, US: IEEE; 2020. DOI: 10.1109/ICUAS48674.2020.9213929 - 65.
Yang J, Yin D, Niu Y, Zhu L. Unmanned aerial vehicles conflict detection and resolution in city airspace. In: Proceedings 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO). NY, US: IEEE; 06-09 December 2015. DOI: 10.1109/ROBIO.2015.7419704 - 66.
Mercado Velasco GA, Borst C, Ellerbroek J, van Paassen MM, Mulder M. The use of intent information in conflict detection and resolution models based on dynamic velocity obstacles. IEEE Transactions on Intelligent Transportation Systems. 2015; 16 (4):2297-2302. DOI: 10.1109/TITS.2014.2376031 - 67.
Besada JA, Campaña I, Bergesio L, Bernardos AM, de Miguel G. Drone flight planning for safe urban operations: UTM requirements and tools. In: Proceedings 2019 IEEE International Conference on Pervasive Computing and Communications Workshops (PerCom Workshops). NY, US: IEEE; 2019. DOI: 10.1109/PERCOMW.2019.8730856 - 68.
Primatesta S, Scanavino M, Lorenzini A, Polia F, Stabile E, Guglieri G, et al. A cloud-based vehicle collision avoidance strategy for Unmanned aircraft System Traffic Management (UTM) in urban areas. In: Proceedings 2020 IEEE 7th International Workshop on Metrology for AeroSpace (MetroAeroSpace); NY, US: IEEE; 22-24 June 2020; DOI: 10.1109/MetroAeroSpace48742.2020.9160145