Open Access is an initiative that aims to make scientific research freely available to all. To date our community has made over 100 million downloads. It’s based on principles of collaboration, unobstructed discovery, and, most importantly, scientific progression. As PhD students, we found it difficult to access the research we needed, so we decided to create a new Open Access publisher that levels the playing field for scientists across the world. How? By making research easy to access, and puts the academic needs of the researchers before the business interests of publishers.
We are a community of more than 103,000 authors and editors from 3,291 institutions spanning 160 countries, including Nobel Prize winners and some of the world’s most-cited researchers. Publishing on IntechOpen allows authors to earn citations and find new collaborators, meaning more people see your work not only from your own field of study, but from other related fields too.
To purchase hard copies of this book, please contact the representative in India:
CBS Publishers & Distributors Pvt. Ltd.
www.cbspd.com
|
customercare@cbspd.com
Communication and network are the critical issues for autonomous vehicles (AVs). Three main aspects will be illustrated in this chapter, including wireless communication, self-organizing network, and data transmission. As a typical representative of autonomous systems, unmanned aerial vehicles (UAVs) are the most widely used and numerous in military and civil fields, most of this chapter focuses on UAVs as technical research objects. Firstly, basic characteristics of wireless communication such as signal propagation and attenuation in different applications and other mobile communication issues for AVs, especially some new technologies, which are adaptable, will be presented. Secondly, the features of AVs network architecture and how to design it will be discussed, while the issues of self-organizing networks for AVs will be investigated. At last, typical data transmission methods such as DDS for AVs will be presented. Also, the critical factors that should be considered in designing the data transmission will be illustrated.
National University of Defense Technology, Changsha, China
*Address all correspondence to: yindong@nudt.edu.cn
1. Introduction
AVs are unmanned systems that have the ability to autonomously observe, object, decide, and act (OODA loop) in air, ground, sea surface, and underwater environments, including unmanned aerial vehicles (UAVs), unmanned ground vehicles (UGVs), unmanned surface vessels (USVs), and unmanned underwater vehicles (UUVs). In practical applications, communication and networks are particularly important for AVs, mainly in two aspects: first, to maintain communication between AVs and mission control stations to ensure that AVs complete various tasks under the supervision of operators; second, to build information transmission channels with other AVs and manned systems, and multi-system collaboration to do operations. In different application scenarios, different structures of networks built by various communication means are used to interact with single or multiple AVs during mission execution, such as fixed structured networks, 4G/5G with star network structure, WiFi, self-organizing network structures without fixed configuration, grid-like grid networks, and mesh networks with multi-layer grid network structure.
In this chapter, the communication network technologies of AVs are described in terms of wireless communication, network architecture, and data transmission. During the introduction, the specific technology applications, challenges, and considerations will be explained with the examples of AVs such as UAVs, unmanned vehicles, and robots, which are widely used at present.
2.1 Various types of communication means and technologies can be used for AVs
A very large number of mobile communication technologies are currently applied to AVs, gradually realizing remote control of AVs, multi-system collaboration, and clustering of large-scale AVs. According to the basic way of communication networking, it can be divided into centralized communication mode and distributed communication mode. In centralized communication, 3G/4G-LTE/5G mobile network-based clustering communication technology and high-power WiFi networking technology for small-scale community-level applications have been gradually proposed [1, 2] and widely used with the benefit of high-bandwidth, low-latency, fast-access, and high-capacity communication capabilities. Unfortunately, this centralized architecture requires central access devices such as base stations and routers, and the communication range is limited by one central device.
Compared with centralized communication networking methods, distributed communication modes are more suitable for cluster systems, of which self-assembling networks as typically distributed networks have become a hot research topic today. For example, UAV cluster self-assembling network [3], that is, the communication between multiple UAVs does not completely rely on basic communication facilities such as ground control stations or satellites, but uses UAVs as network nodes, and each node is able to forward control commands to each other, exchange data such as situational awareness and intelligence collection, and automatically establish a network. Dynamic networking, wireless relay, and other technologies are used to achieve interconnection and interoperability between autonomous systems, with the advantages of self-organization, self-healing capability, and efficient and fast networking to ensure that the UAV group forms a whole to perform combat missions. Gupta et al. [4] pointed out that wireless self-assembling network is the most suitable communication network architecture for UAVs, however, more factors such as dynamic topology, direction of routing, heterogeneous network switching, energy of each UAV, and so on, should be considered for applications. Liang Yi Xin et al. [5] from Southeast University reviewed the airborne network architecture and network protocol stack, compared for planar and hierarchical network structures, and pointed out that research is needed in network architecture design, mobility model, routing mechanism, and transmission control mechanism. Chen Si et al. [6] proposed a highly dynamic mobile self-assembling network architecture scheme with switchable modes. However, only a few researchers can build a more practical network. Chen Wu et al. [7] implemented a small UAV self-assembling network demonstration and validation system based on 802.11 b/g, optimized routing and transmission protocols, implemented an H.264-based video transmission system, and a secure communication protocol based on offline digital certificates, and the system consisted of only one command terminal and three mobile terminals. The system includes only one command terminal and three mobile terminals and has been verified by real flight. The various network communication technologies applicable to UAV clusters are summarized in Table 1.
Networking method
Transmission rate (1Mbps)
Transmission distance (> 1 km)
Communication cost
Satellite
Yes
Yes
High
WiFi
Yes
No
Low
WiMAX
Yes
Yes
Middle
LTE(4G)
Yes
Yes
Middle
Zigbee
No
No
Low
Bluetooth
No
No
Low
UWB
Yes
No
Low
Self-organizing network
Yes
Yes
Middle
Table 1.
Comparison of transmission performance of common communication technologies.
2.2 Key technologies for wireless communication in AVs
AVs usually used in 4D (dangerous, doll, dirty, deep) working environments, geographical environments, weather conditions, and human activities have a greater impact on the wireless communication, therefore, the AVs communication technology of anti-jamming and security is the most important.
2.2.1 Communication anti-jamming
Anti-jamming communication is the general term for various technical and tactical measures to ensure the normal conduct of communications in various interference conditions or complex electromagnetic environments. There are two major types of anti-jamming communication technologies in common use, one is based on the extended-spectrum anti-jamming communication technology, and the other is based on the nonextended spectrum anti-jamming communication technology.
Spread spectrum (SS) is a means of anti-jamming communication that extends the information bandwidth for transmission. Frequency-hopping spread spectrum (FHSS), time hopping spread spectrum (THSS), frequency modulation spread spectrum (Chirp SS), and hybrid spread spectrum. With the development of artificial intelligence technology, anti-interference communication technology based on spectrum awareness, cognitive radio, and other technologies is developing rapidly.
Nonextended spectrum-based anti-jamming communication system is mainly a general term for the technical methods to achieve anti-jamming without extending the spectrum of the signal. At present, the commonly used methods mainly include adaptive filtering, interference cancelation, adaptive frequency selection, automatic power adjustment, adaptive antenna zeroing, smart antenna, signal redundancy, diversity reception, signal interleaving, and signal bursting. Compared with the extended spectrum-based anti-interference communication system, the nonextended spectrum-based anti-interference methods cover a wider range and involve more knowledge. The extended spectrum-based anti-interference communication mainly considers the interference problem in the frequency domain, time domain, and speed domain, while the nonextended spectrum-based anti-interference will focus on the power domain, spatial domain, transform domain, and network domain, in addition to designing the above three areas.
There are more and more anti-interference communication methods when in essence, the goal of all technical methods is to improve the effective signal to noise and interference ratio (SNIR) at the receiver end of the communication system, so as to ensure that the receiver can properly achieve the correct reception of the useful signal.
2.2.2 Communication security
2.2.2.1 Information encryption technology
The data chain uses a uniform bit-oriented defined information standard with a uniform type format, so data encryption is generally used to ensure data security. According to the different ways of plaintext encryption, secret key generation, and management, encryption systems can be divided into three categories: one is group cipher (also known as symmetric encryption), in which the plaintext is first grouped (each group contains multiple characters) and then encrypted group by group; another is public key encryption (also known as asymmetric encryption); and another is single encryption.
A symmetric encryption algorithm is one that uses the same key for encryption and decryption and is reversible (decryptable). The AES encryption algorithm is an advanced encryption standard in cryptography that uses a symmetric packet cipher system with a minimum supported key length of 128. It has been widely analyzed and used worldwide. The advantage of AES is that it is fast, but the disadvantage is that the transfer and storage of the key is a problem, and the key used by both parties involved in encryption and decryption is the same, so the key can be easily leaked.
Asymmetric encryption algorithm means that different keys (public and private) are used for encryption and decryption, so asymmetric encryption, also called public key encryption, is reversible (decryptable). The RSA encryption algorithm is based on a very simple number-theoretic fact: it is easy to multiply two large prime numbers, but extremely difficult to factorize their product, so the product can be made public as the encryption key. Although the security of RSA has never been theoretically proven, it has survived various attacks and has not been completely broken. The advantage of RSA is that the encryption and decryption keys are not the same, and the public key can be made public, so it is only necessary to ensure that the private key is not leaked, which makes the transmission of the key much simpler and reduces the chance of being cracked; the disadvantage is that the encryption speed is slow.
Typical one-way encryption algorithm MD5 full name is message-digest algorithm 5, a one-way algorithm is irreversible (the data encrypted by MD5 cannot be decrypted). The length of the data after MD5 encryption is much smaller than the encrypted data, the length is fixed, and the encrypted string is unique. The algorithm is applicable to scenarios: commonly used in irreversible password storage, information integrity checking, etc. In information integrity checking, a typical application is to generate a message digest for a piece of information to prevent tampering. If there is a third-party certification authority, MD5 can also be used to prevent “repudiation” by the author of the document, which is called a digital signature application.
2.2.2.2 Information authentication technology
Authentication of a message is another important aspect of message security. The purpose of authentication is twofold: first, to verify that the sender of the message is genuine and not an impostor; second, to verify the integrity of the message. That is, to verify that the information has not been tampered with, replayed, or delayed during transmission or storage.
2.2.2.2.1 Digital signature technology
A digital signature algorithm consists of two main algorithms, namely a signature algorithm and a verification algorithm. A signer can sign a message using a (secret) signature algorithm, and the resulting signature can be verified by a public verification algorithm. Given a signature, the verification algorithm makes a “true” or “false” question and answer depending on whether the signature is true or not. There are a large number of digital signature algorithms, such as RSA digital signature algorithm, finite automaton digital signature algorithm, etc.
2.2.2.2.2 Identification technology
The security of communication and data systems often depends on the ability to correctly identify the individual communication user or terminal. There are two main common ways of identification, one is the way of using passwords; the other is the way of using badges. Passwords are the most widely used form of identification. Passwords are generally strings of 5–8 long consisting of numbers, letters, special characters, control characters, etc.
2.3 Relay communications
In the field of autonomous system communication, relay communication is widely used as an effective means to extend the communication range. In this section, we take the most widely used UAV relay communication as an example to explain the relay communication technology.
For UAVs applications in various environments, such as reconnaissance and surveillance [8], assist communication [9, 10], emergency communication [11, 12], search and rescue [13], and so on [14], wireless communication for data transmission between UAVs and GCS often suffers from the undulating terrain, high buildings, and other factors, which block the direct link. In this case, according to the advantages of rapid deployment, mobility, and wide communication range [15], relay UAV is adopted to build up indirect connections by multiple hops, as shown in Figure 1.
Figure 1.
Relay UAV implementation in UAVs swarm.
First of all, the throughput and communication range are the two main issues of relay UAV serving for data transmission. Some researchers propose the optimization for the relay UAV position to maximize the end-to-end throughput [16]. Meanwhile, the communication range for more users, including spectrum resources, energy- efficient and quality-of-service (QoS) are considered in relay applications [17, 18]. Moreover, an iterative and suboptimal algorithm is presented to optimize robust transmit power along with relay UAV speed and acceleration for EE mobile relaying networks [19], and a mood-driven online learning approach is illustrated for relay UAVs assignment and channel allocation to maximize total transmission rate of the networks [20]. Multi-rotor UAVs are usually used as relays with limits of endurance, energy, and mobility, and the collaboration scheme with multiple UAVs substitution to maintain a long time relaying is necessary [21].
Except for the multi-rotor UAVs, fixed-wing relay UAVs with the advantages of high mobility is able to provide better service in a wide range. In this case, the trajectory of the relay is more important. Some methods for trajectory planning are studied [22, 23]. A genetic algorithm is proposed for optimizing the amount of data transmitted to users, as well as the access order and motion trajectory of user groups [24]. A path optimization algorithm is described for fixed-wing UAVs’ relay assistant communication system based on maximizing the weighted sum of ergodic capacity of each state [25].
In addition, the relay task allocation is a typical optimization problem, which is above trajectory planning, QoS, and other aspects [4]. A heterogeneous UAV task assignment model with distributed online task allocation based on the extended CBBA algorithm is investigated [26], while the deployment strategies with a distributed game-theory-based scheduling method are discussed to maximize the stationary coverage to guarantee the continuity of the service [27]. Also, some advanced optimal solutions are studied such as automatic generation control strategy in Ref. [28, 29], a modular relay positioning and trajectory planning algorithm in Ref. [30], and so on.
With the growing applications of UAV swarms in civil and military currently, swarm network and relay cooperative communication became the popular topic. Trajectory planning for dynamically deploying relay UAVs one by one for continuous communication is the main issue. A joint optimization on multi-hop UAVs trajectories and transmitting power to maximize the end-to-end throughput is proposed with the capability of obstacle avoidance [31]. Meanwhile, energy efficiency is another critical issue. An aerial backbone network scheme with the assistance of relay connecting GCS and core networks is presented [32]. Moreover, multiple relay UAVs cooperate to assist in swarm network. The method for UAV cooperative relay is investigated to improve the capability of communication network [33], and also, a UAV relay selection joint game model and a distributed fast UAV relay cooperative formation algorithm are shown to optimize the EE of UAV swarms [34].
How to design the relay planning framework for AVs’ application is a hot topic today [35]. According to UAVs’ tasks schedules and task regions in the swarm, we propose a framework for relay UAVs task planning as shown in Figure 2. In this framework, two main processes are designed, including initial deployment and optimization of task planning of relay UAVs. It is assumed that both relay UAVs (RUs) and mission UAVs (MUs) in the swarm are the same type of fixed-wing UAV.
Figure 2.
Relay planning framework for AVs’ application.
Based on the mission planning of swarm, the first process is to analyze the distribution of task points or regions of each MU and determine when and where the relay is required for assisting the data link between mission UAVs and GCS. In this step, MINLP method is adopted for global deployment for relay UAVs, in which the rough number for deployment and approximate accessing locations for service could be solved. In the next process, the CBBA method is applied to optimize the relaying resource allocation [26] for arranging the RUs as few as possible. In the worst cases, all RUs demand relays to connect GCS at the same time.
Network communication is an important guarantee for information interaction in the process of AVs cooperating to accomplish their tasks. In this section, we will start with a typical network structure, analyze the characteristics of AVs networking requirements, and put forward some suggestions for designing AVs network architecture design.
3.1 Typical wireless network structure
3.1.1 Star network topology
A star topology, also known as a central radiating topology, uses a central node to connect other nodes in a “one-to-many” fashion, as shown in Figure 3 below. Unlike bus topologies that simply broadcast transmitted frames to all connected endpoints, star topologies use components with additional built-in levels of intelligence. The central node maintains dynamic media access control and data traffic forwarding for each node in a star topology deployment.
Figure 3.
Star network structure.
The structural characteristics of the star topology are as follows:
Simple control: Any one site is only connected to the central node, so the media access control method is simple, resulting in a very simple access protocol. Easy network monitoring and management.
Easy fault diagnosis and isolation: The central node can isolate the connected lines one by one for fault detection and location, and the fault of a single connection point affects only one device and does not affect the whole network.
Convenient services: The central node can easily provide services and network reconfiguration to individual sites.
Take the example of a UAV forming a star network. In the star network, each UAV establishes a connection with the central node. There is no direct communication between UAV nodes but rely on the central node for relay and forwarding services. As shown in Figure 4, a multi-star network consists of multiple-star networks. One node in each group is connected to a ground station.
Figure 4.
Multi-star network structure.
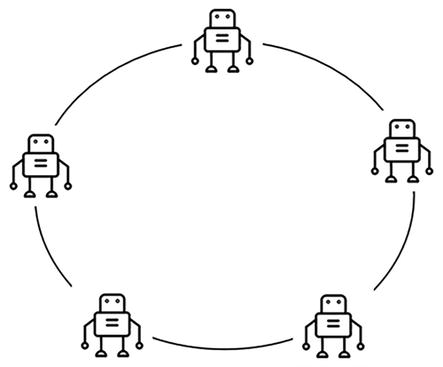
3.1.2 Ring network topology
The data in the ring can only be transmitted in one direction, and the delay time of the information on each device is fixed, which is especially suitable for real-time control LAN system. As shown in Figure 5, the ring structure is like a string of pearls, and each computer on the ring structure is one of the beads on the necklace.
Figure 5.
Ring network structure.
The network characteristics of the ring topology are as follows:
This network structure is generally only applicable to the IEEE 802.5 token network (token ring network), and “tokens” are passed sequentially along a fixed direction in a ring-type connection. There is only one path between every two nodes, and path selection is simplified.
Each node on the loop is bootstrap control.
Since the information source is serially passed through each node in the loop, it will task a long time for transmission when the number of nodes are large in the loop.
Loops are closed and not easily expandable.
When a node failure will cause the whole network to go down.
It is difficult to locate branch node faults.
3.1.3 Tree network topology
A tree topology is a hierarchical structure where nodes are linked and arranged like a tree, as shown in Figure 6. Usually, property topology can be generally divided into three layers: core layer, distribution layer, and access layer. At the top of the tree is core layer, which is the “root” of the tree and also high-speed transmission from current network to another. In the middle of the network is distribution layer, serving transmission for the core, which is also operating the access control and QoS policies. Access layer is at the bottom, where endpoint devices or users connect.
Figure 6.
Tree structure for network.
The network characteristics of the tree topology are as follows:
Simple network structure, easy to manage
Simple control, easy network building, and easy expansion. The tree structure can be extended with many branches and subbranches, and these new nodes and new branches can be easily added to the network.
Short network latency and low bit error rate
Fault isolation is easier. If a node or line in a branch fails, it is easy to isolate the failed branch from the entire system.
Poor network sharing capability
Underutilization of communication lines
The root node is too heavily loaded and the individual nodes are too dependent on the root node. If the root fails, the whole network does not work properly.
3.1.4 Mesh network topology
A mesh topology is another nonhierarchical structure in which each network node is directly connected to all other nodes, as shown in Figure 7 below. A mesh topology ensures great network resilience because if a connection is disconnected, neither disruption nor connection loss occurs. Instead, traffic is simply rerouted along a different path.
Figure 7.
Mesh network structure.
The structural characteristics of the mesh network topology are as follows:
The network is highly reliable, and generally, there are two or more communication paths between any two node switches in the communication subnet, so that when one path fails, information can still be sent to the node switch through the other path.
Networks can be formed in a variety of shapes, using a variety of communication channels and a variety of transmission rates
Easy to share resources among nodes in the network
Improved information traffic distribution on the line
Optimal path selection and low transmission latency
A hierarchical grid network removes the central node and enables all nodes to connect, as shown in Figure 8. A hierarchical mesh network has multiple grids, and one node in each group is able to reach other groups. All nodes in the hierarchical grid network are able to self-organize. While one node fails, the remaining nodes are triggered to rebuild the network. For some practical applications, the hierarchical grid network is more suitable for the multi-AVs system.
Figure 8.
Hierarchical network structure.
3.2 Analysis of the demand characteristics of AVs’ networking
Large-scale AVs applications are characterized by large numbers, wide range, fast speed, flexible mobility, frequent changes in space-temporal relationships, changeable tasks, and cross-regional scheduling, which pose greater challenges in terms of clarifying the information transfer between systems, network structure, and dynamic optimization. Through the authors’ previous studies [1, 2, 35], we analyze and summarize the main challenges and challenges in the current research of AVs’ networking, as follows.
3.2.1 Insufficient correlation between network architecture design and AVs cluster tasks
The current network planning and communication studies of large-scale AVs are disconnected from the cluster task requirements and lack the understanding of the intrinsic connection between task behavior and information transfer in the network layer. The cluster network of large-scale AVs is a typical complex network, which should start from the typical task characteristics of the cluster, establish a model of individual behavior and information transfer between individuals, and thus design the network generation method. Most of the current research abstracts the AVs task process as a model of prime behavior with certain probability distribution characteristics and unifies the various types of information of concurrent interaction between nodes as the value of transmission capacity between nodes, which makes the network architecture theory research detached from the cognition of the cluster task. In the link communication layer, a large amount of research work focuses on communication waveform design, channel design, and access technology, while the type of information service and transmission characteristics in the cluster task process is not considered for problem formulation, difficulty attack to testing process. Therefore, there is an urgent need to explore the associated transfer mapping and characterization methods from the cluster task domain to the information domain and to guide the design and construction of the cluster network architecture from the task process to the information requirements.
3.2.2 The contradiction between loose organizational structure and close communication relationship
The contradiction between the loose cluster organization in the AVs network and the close communication of multiple nodes involved in collaborative tasks within the cluster poses a big challenge to the construction of the cluster network structure. On the one hand, the cluster of autonomous vehicles is “task/sub-task-centric,” and each AV can be scheduled and assigned online, resulting in flexible entry and exit of nodes and rapid integration and separation of subnetworks, which make the nodes loosely coupled in terms of organizational structure. On the other hand, in the task process, the information interaction between nodes around the same subtask is frequent, the information transfer between subnets in the collaborative task is close, and each link of the task is closely coupled with the information quality, meanwhile, the movement and state of each node participating in the task will affect the data link stability and transmission quality, thus making the task participants and information transfer tightly coupled together. The loose task organization and behavior of the cluster bring a great challenge to the close information interaction between nodes in task execution. In this regard, it is necessary to deeply analyze the characteristics of AVs’ group behavior, explore the coupling mechanism between task behavior and information service, and propose a network generation method with mutual coupling of link layer, network layer, transmission layer, and application layer.
3.2.3 Conflict between task-oriented planning and communication network optimization
In the main system network architecture, each AV node balances mission and communication, and there is a contradiction between mission replanning and network optimization in complex dynamic scenarios, and the network robustness and transmission stability face challenges. In complex mission scenarios, such as low-altitude close-range reconnaissance surveillance, earthquake relief emergency communication, etc., the mission may be replanned with the development of the situation (mission reassignment, route replanning, etc.), and the organizational relationship of the cluster changes accordingly; at the same time, the mission may encounter the loss of a few AVs due to loss of control or destruction, resulting in network topology changes, requiring reconfiguration of links, adjustment of network topology, and optimization of routing, and how to ensure continuous and stable network information delivery during dynamic changes is an optimization problem. However, each AV in the cluster is both a task performer and a network participant, and planning and constraining the behavior of AVs from two different dimensions of network optimization and task execution at the same time is an optimization challenge that cannot be solved. In this regard, the dynamic evolution process of the network needs to be studied in terms of the role assignment and role change of each node in the cluster in the task as well as the time-varying task correlation among the nodes.
3.3 Design thinking of AVs networking for task-oriented process
Based on a comprehensive analysis of the main problems and challenges, this paper proposes a valve idea of small-world network generation for AVs clusters based on task cognition, which mainly solves two problems: firstly, it starts by analyzing the task flow and recognizing the information and communication requirements, and constructs a dynamic diagram of the internal topological association of the group with the development of the task chronology; secondly, it constructs a multi-layer network structure combining “self-organized multi-hop transmission and cooperative relay communication” for the data transfer characteristics of the group subtasks, and establishes a network organization method and mechanism that adapts to the changes of subtask increase/decrease and node loss, so as to achieve better support for the cooperative tasks of AVs clusters.
The main idea of the task-oriented AVs network planning and generation system design is that the AVs have the characteristics of local convergence and global dispersion, or global convergence as a whole, with the target or specific task as the center in the actual application process, and the information transfer interaction between individuals within the cluster must meet the timeliness requirements of the task.
As shown in Figure 9, the first layer is the application layer, which mainly solves the problem of cognition from cluster task domain to information domain. It can adopt the description method of information flow, establish the characterization method and model from cluster task domain to network information domain, and get the information cross-linking relationship within the cluster, whose difficulties are: there are many types of cluster tasks, single-computer independent tasks and multi-computer collaborative tasks are intertwined and can be executed in parallel, and the information business requirements change with the advancement of task time, yes, the granularity of task decomposition is closely coupled with information flow description, and it is difficult to accurately decompose cluster tasks and establish dynamic information flow model between nodes.
Figure 9.
AVs network generation method based on missions.
The second layer is the network layer, which mainly solves the problem of network generation and evolution adapted to the cluster task characteristics. Based on the information association relationship of each node in the cluster established in the first layer, the logical topology relationship of the network is constructed and the initial topology diagram of the network is formed.
The third layer is the link layer, considering the physical characteristics of the link, and combining the idea of “multi-hop and relay,” proposing a network-structured design and generation method to guide the construction of network links, and establishing a dynamic network link reconfiguration method to cope with sudden changes in network topology in complex environments.
Data transmission between multiple autonomous vehicles is a typically distributed information transmission mode. There are two kinds of information transmission in the current distributed system: one is to establish point-to-point direct communication mode; the other is the indirect communication mode in which the information producer and consumer are decoupled.
4.1 Direct communication mode
4.1.1 Inter-process communication
Inter-process communication refers to the relatively low-level communication methods used between processes in distributed systems, including message-passing meta-language, direct access to API provided by network protocols (socket programming), and support for multicast communication.
4.1.2 Remote procedure call, RPC
RPC is the most common communication paradigm in distributed systems and consists of a set of techniques based on bi-directional exchange between communicating entities in a distributed system, including remote operations, procedures, or methods. The most common ways of RPC are request-response mode, remote procedure invocation, and remote method invocation.
4.1.3 Remote method invocation, RMI
RMI is very similar to RPC, but it is applied to the environment of distributed objects. In this method, an object that initiates a call is able to call a method in a remote object. As with RPC, the underlying details are hidden from users. For example, in Java, just a class extends the java.rmi. Remote interface can become a remote object that exists on the server side for the client to access and provide certain services.
4.2 Indirect communication
A characteristic of indirect communication is that these technologies will support the adoption of a third entity, allowing deep decoupling between the sender and the recipient. Kafka, for example, is a typical technique for indirect communication, which is considered a message queue implementation and can also be used as a publish-subscribe system.
Indirect communication will come to be considered to handle two main scenarios:
Spatial decoupling: senders do not need to know who they are sending to
Time decoupling: sender and receiver do not need to exist at the same time
The key technologies of indirect communication mainly include: publish-subscribe system, message queue, distributed shared memory (DSM) and tuple space, and group communication, among which publish-subscribe system and message queue are the most widely used indirect communication technologies in ROS and other applications.
4.2.1 DDS (distributed data system, distribution-subscription system)
Data Distribution Service (DDS) is a standard data-centric distributed system publishing and subscription programming model and specification that is compatible with the performance requirements and hard real-time requirements of data-centric distributed applications. DDS can control service behavior through quality of service (QoS) and effectively support complex data communication models [36].
4.2.1.1 DDS specifications
The DDS standard consists of two separate parts: the first part is data-centric publish-subscribe (DCPS), which deals with data-centric publish/subscribe, and applications can use this layer to communicate with each other; the second part is the Data Local Reconstruction Layer (DL-RL), which is located on top of the DCPS layer and can abstract the lower services and establish mapping relationships. It is an optional object-oriented layer.
DDS uses standard software application programming interfaces (APIs) to provide an infrastructure for communication between various applications and can be quickly added to any software application.
4.2.1.2 DCPS communication mechanism
Data is transferred across domains, and there can be publishers, subscribers, or both on a node. The publisher owns and manages the data writers and the subscriber owns and manages the data readers. A data reader and a data writer must be associated through the same subject and compatible QoS policies so that data published by the data writer can be received by the subscribed data reader, as shown in Figure 10.
Figure 10.
Publishing and subscription programming model.
Domain: A domain represents a logically isolated communication network. Applications that use DCPS to exchange data must belong to the same domain, and entities belonging to different domains will never exchange data; Domain Participant: A domain actor is an entry point for an application to interact in a particular domain and a factory for multiple objects to write or read data.
Topic: A topic is a method of publish/subscribe interaction and consists of a topic name and topic type. The topic name is a string that uniquely identifies the topic within the domain. A topic type is a definition of the data that a topic contains. Each topic data type can specify its key to distinguish different instances of the same topic. In the DCPS communication model, a connection can be established only when the topics of the data writer and the data reader match each other.
Data writer: The application passes the value to the DDS by using the data writer. Each data writer must be a specific topic, and the application publishes examples on that topic using an interface of the type specified by the data writer. The data writer is responsible for encoding the data and passing it to the publisher for transmission.
Publisher: The exact mechanism used to capture published data and send it to the relevant subscribers in the domain is determined by the implementation of the service.
Subscriber: Receives a message from the publisher and delivers it to any associated data reader connected to it.
Data reader: Gets the data from the subscriber, decode the topic into the appropriate type, and delivers the sample to the application. Each data reader must be a specific topic. The application uses a specific type of interface to the data reader in order to receive samples easily.
4.2.1.3 QoS policy
The fine control of real-time QoS is one of the most important features of DDS. DDS defines multiple QoS policies, including reliability, bandwidth control, send cycle, and resource restriction. Each publisher/subscriber can establish an independent QoS protocol, so DDS designs can support extremely complex and flexible data flow requirements. It should be noted that these policies can be applied to all entities in DCPS, but not all policies will work for every entity type. The match between publisher and subscriber is done using the request-offered (RxO) mode. In this pattern, the publisher “provides” a set of QoS policies, the subscriber “requests” a set of required QoS policies, and the middleware is responsible for determining whether the provided policies match the requested policies, thereby establishing communication or indicating incompatibility errors.
4.2.1.4 Discovery process
In DDS, publishers and subscribers do not need to specify the number and location of each other; the application sends samples of a topic one at a time, and the middleware distributes samples to all applications that want that topic. In addition, new publications and subscriptions for topics may appear at any time, and middleware will automatically interconnect with each other. The mechanism of DDS is realized through list information. The dissemination of list information between applications by DDS is called “discovery” process [40].
4.2.1.5 Features of DDS
The advantages of the system structure of DDS are summarized as follows:
The concept of global data space is introduced to improve the communication efficiency.
Take data as the center to reduce network delay.
QoS is used to control the service behavior, which increases the communication flexibility.
UDP/IP protocol is adopted to increase the network throughput.
Dynamic configuration to improve data transmission capability.
4.3 Message queues
Message middleware pass, also known as a message queue server, is a technology often used in today’s distributed application architectures as a way to communicate asynchronously from program to program, where the sender of a message does not have to wait all the time for the message to finish processing, but instead sends the message to the message middleware and returns. The designated consumers of the messages subscribe to the messages and process them. The message queue model means that the message producer puts messages into a queue and the message consumer messages from the queue. The publish-subscribe system means that the message producer publishes messages to the queue of a specified topic and the message consumer subscribes to the queue messages of the specified topic. When there is a new message in the subscribed topic, the message consumer can consume the message by pull or the message middleware by push.
As shown in Figure 11, the first modern message queue software The Information Bus (TIB) was developed in 1982, and three years later IBM’s message queue IBM MQ product family was released, followed by a period of evolution of the MQ family into WebSphere MQ to rule the commercial message queue platform market. The year 2001 saw the birth of Java Message Service (JMS), JMS by providing a public Java API way to hide the implementation interface of separate MQ product vendors, thus spanning different MQ consumption and solving interoperability problems. Later, AMQP (Advanced Message Queuing Protocol) advanced message queuing protocol was created, which uses a standard set of underlying protocols, adding many other features to support interoperability. Currently, there is a proliferation of open-source message queuing middleware, with the more popular ones being ActiveMQ, RabbitMQ, Kafka, and Ali’s RocketMQ.
Figure 11.
Development of message queues.
4.3.1 ActiveMQ
ActiveMQ is produced by Apache, the most popular, powerful open-source messaging bus, which is a fully supported JMS1.1 and J2EE 1.4 specification of the JMS provider implementation, designed to provide efficient, scalable, stable, and secure enterprise-class messaging for applications, as shown in Figure 12.
Figure 12.
The process of active message queues.
The ActiveMQ client uses the ConnectionFactory object to create a connection through which messages are sent to and received from the messaging service. Connection is the active connection between the client and the messaging service. When the connection is created, communication resources are allocated and the client is authenticated. This is a fairly important object, and most clients use a connection for all messaging. A connection is used to create a session, which is a single-threaded context for generating and using messages. It is used to create producers who send and consumers who receive messages and to define the delivery order for the messages sent. Sessions support reliable delivery through a large number of acknowledgment options or through transactions.
The client sends messages to a specified physical target by the MessageProducer, which can specify a default delivery mode, priority, validity value, and other factors to control all messages. Meanwhile, the client receives messages from the specified physical target by the MessageConsumer. The consumer can use a message selector designed for consumer, which operates the messaging services and matches the selection criteria. Also, consumer is able to synchronously or asynchronously receipt messages.
4.3.2 RabbitMQ
RabbitMQ is an AMQP (Advanced Message Queued Protocol) messaging middleware implemented in Erlang language, originally originated in financial systems and used in distributed systems for storing and forwarding messages. This is due to its outstanding performance in terms of ease of use, scalability, reliability, and high availability.
The basic components of RabbitMQ and its workflow are shown in Figure 13:
Figure 13.
The process of RabbitMQ.
Broker: The entity server of RabbitMQ. It provides a transport service that maintains a transport line from the producer to the consumer, ensuring that message data is transmitted in the specified manner.
Exchange: The message switch. Specifies to which queue messages are routed according to what rules.
Queue: Message queue. The carrier of messages, each message is cast to one or more queues.
Binding: The effect is to bind exchange and queue according to some routing rules.
Routing Key: A routing key by which the exchange delivers messages. The key specified when defining the binding is called the binding key.
Vhost: Virtual host. A broker can have multiple virtual hosts, which are used as a separation of privileges for different users. A virtual host holds a set of exchange, queue, and binding.
Producer: Message producer. Mainly delivers messages to the corresponding exchange. It is usually a standalone program.
Consumer: Message consumer. Receiver of messages, usually a stand-alone program.
Connection: TCP long connection between producer, consumer, and broker.
Channel: Message channel, also known as a channel. Multiple channels can be created in each connection of the client, each channel represents a session task. In the RabbitMQ Java Client API, there are a large number of programming interfaces defined on the channel.
4.3.3 RocketMQ
RocketMQ is a distributed messaging middleware open-sourced by Alibaba in 2012, which was donated to Apache Software Foundation and became an Apache top-level project on September 25, 2017. As a homegrown middleware that has experienced the baptism of Alibaba’s “Double 11” super project and has stable and outstanding performance, it has been used by more and more domestic enterprises in recent years for its high performance, low latency, and high-reliability features.
The basic components of RocketMQ and its workflow are shown in Figure 14.
Figure 14.
The process of RocketMQ.
Producers: Message producers, responsible for producing messages, are selected by the MQ load balancing module to deliver messages to the appropriate broker cluster queue, with fast failure and low latency support, and all message producers in RocketMQ are in the form of producer groups. A producer group is a collection of producers of the same type, which sends messages of the same topic type. A producer group can send messages for multiple topics at the same time.
Consumer: Message consumer, responsible for consuming messages. A message consumer gets the message from the broker server and performs the related business processing on the message; message consumers in RocketMQ are in the form of consumer groups. A consumer group is a collection of consumers of the same type, and such consumers consume messages of the same topic type.
NameServer: It is a registration center for broker and topic routes, and mainly contains two parts, which are as follows:
Broker management: It accepts the registration information, which is saved as the basic data of routing information. It also provides heartbeat detection mechanism to check the activity of the broker.
Routing information management: Every NameServer owns the entire routing information of the broker cluster and the queue information for client queries, and the producer and consumer can obtain the routing information of the entire broker cluster through the NameServer to deliver and consume the messages.
Broker: The broker acts as a message relay, storing and forwarding messages, and is responsible for receiving and storing messages from producers in the RocketMQ system and preparing them for pull requests from consumers.
4.3.4 Kafka
Kafka was first developed as a distributed publish/subscribe-based messaging system by LinkedIn Corporation and later became a top project of Apache.
The basic components of Kafka and its workflow are shown in Figure 15.
Figure 15.
The process of Kafka.
Producer: Producer, as a producer of messages, needs to deliver messages to a specified destination (a partition of a topic) after production. Producer can choose which partition to publish messages according to the specified algorithm for selecting partition or in a random way.
Consumer: In Kafka, there is also the concept of consumer group, which is a logical grouping of some consumers. Because each Kafka consumer is a process, so the consumers in a consumer group will probably be composed of different processes distributed on different machines.
Broker: The main server used to store messages supports horizontal scaling (the more the number, the better the cluster throughput), and the storage of messages is divided by topic+partition (topic partition); the offset (offset) of each message within a particular topic/partition is stored together with the timestamp of the message when the message is stored until the expiration time (in the server). The offset of each message in a particular topic/partition is stored with the timestamp of the message, and when the message is stored until its expiration time (configurable in the server), it is automatically deleted to free up space (whether it has been consumed or not).
ZooKeeper: The broker side does not maintain the consumption state of the data and delegates it to ZooKeeper, which improves performance.
The main features of ActiveMQ, RabbitMQ, Kafak, and RocketMQ are compared in the following Table 2.
Characteristics
ActiveMQ
RabbitMQ
RocketMQ
Kafka
Application
Mature
Mature
RocketMQ is used in a large number of applications within Ali Group, generating massive messages every day, and has successfully supported many Tmall Double Eleven massive message tests, and is a powerful tool for data peak shaving and valley filling.
Kafka is more mature in the logging space.
Community activity
Medium-high
High
High
High
Stand-alone throughput
Million
Million
Ten million (less than Kafka)
Ten million (Highest)
Timeliness
Millisecond
Microsecond
Millisecond
Millisecond
Availability
High, master–slave-based architecture for high availability.
High, master–slave-based architecture for high availability.
Very high, distributed architecture
Very high, distributed, multiple copies of data, few machines down, no data loss, no unavailability
Support pacts
OpenWire, STOMP, REST, XMPP, AMQP
AMQP
Own defined set (community provides JMS - immature)
Does not follow the standard MQ interface protocol, relatively complex to use.
Message loss
There is a low probability of data loss.
There is a low probability of data loss.
Optimized configuration with parameters to achieve zero loss.
Optimized configuration with parameters to achieve zero loss.
Feature Support
The MQ domain is extremely full-featured.
Erlang-based strong concurrency, excellent performance, very low latency
MQ is more functional, still distributed, and scalable.
Support for simple MQ functions, real-time computing in the field of big data, and log collection is used on a large scale.
The impact of topic number on throughput
Topics can reach hundreds/thousands of levels, and there is a small drop in throughput, which is a major advantage of RocketMQ, which can support a large number of topics on the same machine.
When the topic is from tens to hundreds, the throughput will drop dramatically, under the same machine, Kafka tries to ensure that the number of topics is not too much, if you want to support a large number of topics, you need to add more machine resources.
Table 2.
Comparison of message queue features of commonly used distributed systems.
4.4 Key factors to be considered when designing data transmission
communication middleware is a data transmission platform that isolates application layer components from traditional communication architecture, network details, and operating systems. With the idea of layering, it effectively reduces the dependence between different layers and improves the software’s scalability, reusability, portability, and other performance [37], which is an important direction for the development of radar communication in the future [38, 39].
The traditional communication middleware based on client/server model mainly focuses on business decision-making and display, and the data exchange between nodes is low in efficiency and small in data volume, which cannot meet the transmission requirements of distributed high real-time and large data volume. Therefore, communication products implemented based on this model have been gradually replaced. Aiming at the problems of traditional communication middleware, developing a new generation of real-time communication middleware has become a key task in the field of radar communication. In 2003, OMG developed a new generation of communication middleware based on CORBA. In face of market demand, the new generation of communication middleware must meet the following three requirements [40]:
4.4.1 Support communication between distributed nodes
In multi-radar distributed system, the requirement of real-time communication middleware is mainly reflected in the data transmission mode between communication nodes, including one-to-one, one-to-many, many-to-many, etc., which is mainly characterized by real-time, high bit rate, and concurrent communication.
4.4.2 Support dynamic joining and exiting of communication nodes
The new generation of communication middleware adopts the standard publish/subscribe model and defines the unified standard data transmission interface. It changes the development mode of the traditional communication middleware through the anonymous communication subject information published and subscribed data, so as to realize the dynamic entry and exit of communication nodes.
4.4.3 Loose coupling of communication nodes
Real-time communication middleware uses the data-centered publishing and subscription mechanism to realize the loose coupling between communication nodes. Middleware is located between the application layer and the operating system layer. It provides standard interface services on the upper side and shields the complex communication details and diversified operating systems on the lower side. In view of different environments, the appropriate operating system is selected according to the operating system adapter to realize the decoupling between application components and operating systems.
This chapter focuses on the communication and network technologies applicable to AVs, firstly, it discusses the wireless communication technologies and means commonly used in AVs, analyzes the main bottlenecks, and discusses the most important relay communication methods for remote communication in AVs; secondly, it focuses on the networking aspects of AVs, introduces the typical network structure and analyzes the demand characteristics of AVs networking, and proposes a task-oriented network design idea for AVs; finally, it describes the direct and indirect communication modes in distributed AVs, with a focus on DDS and message queues.
Special thanks to Yang Xuan, Huang Bowen, and Zhao Haojun for their participation in document collation and chart drawing in this chapter.
References
1.Ding X, Yin D, Zhou Y, Lai J, Wang Y. Joint communication quality assurance algorithm for UAVs flying over urban LTE networks. In: 2017 3rd IEEE International Conference on Computer and Communications (ICCC). Chengdu: IEEE; December 2017. pp. 490-496. DOI: 10.1109/CompComm.2017.8322595
2.Chen Z, Yin D, Chen D, Pan M, Lai J. WiFi-based UAV communication and monitoring system in regional inspection. In: 2017 International Conference on Computer Technology, Electronics and Communication, ICCTEC 2017, December 18, 2017 - December 20, 2017. Dalian, China: IEEE; 2017. pp. 1395-1401. DOI: 10.1109/ICCTEC.2017.00305
3.Sharma V, Kumar R, Kumar N. DPTR: Distributed priority tree-based routing protocol for FANETs. Computer Communications. 2018;122:129-151. DOI: 10.1016/j.comcom.2018.03.002
4.Gupta L, Jain R, Vaszkun G. Survey of important issues in UAV communication networks. IEEE Communications Surveys and Tutorials. 2016;18(2) Art. no. 2:1123-1152. DOI: 10.1109/COMST.2015.2495297
5.Liang Y, Cheng G, Guo X, Zhou A. Research Progress on airborne network architecture and protocol stack. Journal of Software. 2016;27(1):96-111. DOI: 10.13328/j.cnki.jos.004925
6.Chen S, Zhang K, He Y. Architecture design and mode research of high-dynamic self-organizing UAV network. Compute Science. 2015;42(2):50-54
7.Wu XC, Kaijiang S, Li Z, Xiao. Designing and implementing self-organized unmanned aerial vehicle (UAV) ad hoc network. Journal of Northwest Polytechnic University. 2009;6:854-858
8.Kingston D, Beard RW, Holt RS. Decentralized perimeter surveillance using a team of UAVs. IEEE Transactions on Robotics. 2008;24(6):1394-1404. DOI: 10.1109/TRO.2008.2007935
9.Zhang T, Xu Y, Loo J, Yang D, Xiao L. Joint computation and communication design for UAV-assisted Mobile edge computing in IoT. IEEE Transactions on Industrial Informatics. 2020;16(8):5505-5516. DOI: 10.1109/TII.2019.2948406
10.Li M, Cheng N, Gao J, Wang Y, Zhao L, Shen X. Energy-efficient UAV-assisted Mobile edge computing: Resource allocation and trajectory optimization. IEEE Transactions on Vehicular Technology. 2020;69(3):3424-3438. DOI: 10.1109/TVT.2020.2968343
11.Xie L, Xu J, Zeng Y. Common throughput maximization for UAV-enabled Interference Channel with wireless powered communications. IEEE Transactions on Communications. 2020;68(5):3197-3212. DOI: 10.1109/TCOMM.2020.2971488
12.Wang B, Sun Y, Sun Z, Nguyen LD, Duong TQ. UAV-assisted emergency Communications in Social IoT: A dynamic hypergraph coloring approach. IEEE Internet of Things Journal. 2020;7(8):7663-7677. DOI: 10.1109/JIOT.2020.2988445
13.Chaves AN, Cugnasca PS, Jose J. Adaptive search control applied to search and rescue operations using unmanned aerial vehicles (UAVs). IEEE Latin America Transactions. 2014;12(7):1278-1283. DOI: 10.1109/TLA.2014.6948863
14.Kumar N, Puthal D, Theocharides T, Mohanty SP. Unmanned aerial vehicles in consumer applications: New applications in current and future smart environments. IEEE Consumer Electronics Magazine. 2019;8(3):66-67. DOI: 10.1109/MCE.2019.2892278
15.Alsuhli G, Fahim A, Gadallah Y. A survey on the role of UAVs in the communication process: A technological perspective. Computer Communications. 2022;194:86-123. DOI: 10.1016/j.comcom.2022.07.021
16.Burdakov O, Doherty P, Holmberg K, Olsson P-M. Optimal placement of UV-based communications relay nodes. Journal of Global Optimization. 2010;48(4):1-24. DOI: 10.1007/s10898-010-9526-8
17.Khawaja W, Guvenc I, Matolak DW, Fiebig U-C, Schneckenburger N. A survey of air-to-ground Propagation Channel modeling for unmanned aerial vehicles. IEEE Communications Surveys and Tutorials. 2019;21(3):2361-2391. DOI: 10.1109/COMST.2019.2915069
18.Mozaffari M, Saad W, Bennis M, Debbah M. Drone small cells in the clouds: Design, deployment and performance analysis. In: 2015 IEEE Global Communications Conference (GLOBECOM). San Diego, CA, USA; Dec. 2015. pp. 1-6. DOI: 10.1109/GLOCOM.2015.7417609
19.Ahmed S, Chowdhury MZ, Sabuj SR, Alam MI, Jang YM. Energy-efficient UAV relaying robust resource allocation in uncertain adversarial networks. IEEE Access. 2021;9:59920-59934. DOI: 10.1109/ACCESS.2021.3073015
20.Zhong X, Guo Y, Li N, Li S. Joint relay assignment and channel allocation for opportunistic UAVs-aided dynamic networks: A mood-driven approach. IEEE Transactions on Vehicular Technology. 2020;69(12):15019-15034. DOI: 10.1109/TVT.2020.3032125
21.Zhang G, Ou X, Cui M, Wu Q, Ma S, Chen W. Cooperative UAV enabled relaying systems: Joint trajectory and transmit power optimization. IEEE Transactions on Green Communications and Networking. 2022;6(1):543-557. DOI: 10.1109/TGCN.2021.3108147
22.Jeong S, Simeone O, Kang J. Mobile edge computing via a UAV-mounted cloudlet: Optimization of bit allocation and path planning. IEEE Transactions on Vehicular Technology. 2018;67(3):2049-2063. DOI: 10.1109/TVT.2017.2706308
23.Hosseinalipour S, Rahmati A, Dai H. Interference avoidance position planning in dual-hop and multi-hop UAV relay networks. IEEE Transactions on Wireless Communications. 2020;19(11):7033-7048. DOI: 10.1109/TWC.2020.3007766
24.Anazawa K, Li P, Miyazaki T, Guo S. Trajectory and data planning for Mobile relay to enable efficient internet access after disasters. In: 2015 IEEE Global Communications Conference (GLOBECOM). San Diego, CA, USA: IEEE; Dec. 2015. pp. 1-6. DOI: 10.1109/GLOCOM.2015.7417170
25.Li D, Li C, Liu H. “Path-optimization method for UAV-aided relay broadcast communication system”. Physics Communications. Dec 2018;31:40–48. DOI: 10.1016/j.phycom.2018.10.001
26.Yan S, Xu J, Song L, Pan F. Heterogeneous UAV collaborative task assignment based on extended CBBA algorithm. In: 2022 7th International Conference on Computer and Communication Systems (ICCCS). Wuhan, China: IEEE; Apr. 2022. pp. 825-829. DOI: 10.1109/ICCCS55155.2022.9846676
27.Trotta A, Felice MD, Montori F, Chowdhury KR, Bononi L. Joint coverage, connectivity, and charging strategies for distributed UAV networks. IEEE Transactions on Robotics. 2018;34(4):883-900. DOI: 10.1109/TRO.2018.2839087
28.Xi L, Li Y, Huang Y, Lu L, Chen J. A novel automatic generation control method based on the ecological population cooperative control for the islanded smart grid. Complexity. 2018;2018:1-17. DOI: 10.1155/2018/2456963
29.Xie L, Wu J, Li Y, Sun Q, Xi L. Automatic generation control strategy for integrated energy system based on ubiquitous power internet of things. IEEE Internet of Things Journal. 2022;10:1-1. DOI: 10.1109/JIOT.2022.3209792
30.Yanmaz E. Positioning aerial relays to maintain connectivity during drone team missions. Ad Hoc Networks. 2022;128:102800. DOI: 10.1016/j.adhoc.2022.102800
31.Zhang G, Yan H, Zeng Y, Cui M, Liu Y. Trajectory optimization and power allocation for multi-hop UAV relaying communications. IEEE Access. 2018;6:48566-48576. DOI: 10.1109/ACCESS.2018.2868117
32.Challita U, Saad W. Network formation in the sky: Unmanned aerial vehicles for multi-hop wireless backhauling. In: GLOBECOM 2017–2017 IEEE Global Communications Conference. Singapore: IEEE; 2017. pp. 1-6. DOI: 10.1109/GLOCOM.2017.8254715
33.Li K, Ni W, Wang X, Liu RP, Kanhere SS, Jha S. Energy-efficient cooperative relaying for unmanned aerial vehicles. IEEE Transactions on Mobile Computing. 2016;15(6):1377-1386. DOI: 10.1109/TMC.2015.2467381
34.Yao C et al. Coalition game based relay decision distributed learning in high dynamic heterogeneous intelligent UAV networks. Journal of Intelligent Fuzzy Systems. 2018;35:1. DOI: 10.3233/JIFS-169574
35.Yin D, Yang X, Yu H, Chen S, Wang C. An air-to-ground relay communication planning method for UAVs swarm applications. IEEE Transactions on Intelligent Vehicles. 2023;8(4):2983-2997. DOI: 10.1109/TIV.2023.323732
36.Tianyi W, Bo G. Research on DDS Technology for Distributed Real-time System Data Distribution Service. Electronic Science and Technology. 2020;33(8):40-45. DOI: 10.16180/j.cnki.issn1007-7820.2020.08.007
37.Guoliang F. Design and Implementation of Data Distribution Middleware Based on DDS [Thesis]. China: Nanjing University of Aeronautics and Astronautics; 2012
38.Shuxia G, Yafeng W, Xiongjun S, Ying G. Exploratory analysis of radar detection efficiency in complex electromagnetic environment. Journal of Northwestern Polytechnical University. 2015;33(5):837-842
39.Jiaming Z. Design and Implementation of Distributed Instant Messaging Scheme Based on Pub/Sub [Thesis]. China: University of Chinese Academy of Sciences (Shenyang Institute of Computing Technology, Chinese Academy of Sciences); 2017
40.Jiaxing Z. Design and Implementation of Real-Time Communication Middleware [Thesis]. China: University of Electronic Science and Technology of China; 2021
Written By
Dong Yin
Submitted: 27 March 2023Reviewed: 03 April 2023Published: 25 May 2023
 Open access peer-reviewed chapter
Open access peer-reviewed chapter