Open Access is an initiative that aims to make scientific research freely available to all. To date our community has made over 100 million downloads. It’s based on principles of collaboration, unobstructed discovery, and, most importantly, scientific progression. As PhD students, we found it difficult to access the research we needed, so we decided to create a new Open Access publisher that levels the playing field for scientists across the world. How? By making research easy to access, and puts the academic needs of the researchers before the business interests of publishers.
We are a community of more than 103,000 authors and editors from 3,291 institutions spanning 160 countries, including Nobel Prize winners and some of the world’s most-cited researchers. Publishing on IntechOpen allows authors to earn citations and find new collaborators, meaning more people see your work not only from your own field of study, but from other related fields too.
This chapter introduces the foundations of the Extended Kalman Filter (EKF) and Unscented Kalman Filter (UKF) for data sensor fusion applications in surveillance applications. After explaining how to model the drone under the constant turn rate and velocity (CTRV) dynamics, the EKF and UKF techniques for Lidar and Radar data sensor fusion are applied to enable better 3D object detection and reconstruction from point cloud data is evaluated under a performance comparison. Through root mean square error (RMSE) and mean square error (MSE) the filters are designed to meet the specifications of the model based on the position of the gathered points (X and Y axis) in the space state model. By degrading the measurements with Gaussian and Rayleigh noise, the results evaluate and compare both techniques to show the tolerance and performance in terms of stability, scalability, and application to drone monitoring in surveillance activities.
University Pedagogical and Technological of Colombia, Sogamoso, Colombia
Eduardo A. Fernández
University Pedagogical and Technological of Colombia, Sogamoso, Colombia
Marco J. Suarez
University Pedagogical and Technological of Colombia, Sogamoso, Colombia
*Address all correspondence to: oscarjavier.montanez@uptc.edu.co
1. Introduction
Intelligent autonomous systems have gained great importance today, often supported by artificial intelligence, assisting in daily tasks by reducing margins of error associated with human factors. Specifically in the field of autonomous driving, new trends in automotive manufacturing focus on the implementation of self-sufficient techniques for driver assistance, saving lives, and reducing driver fatalities on highways. It is estimated that 90% of accidents are due to human error, and 40% of these errors are caused by driver distraction. One of the first prospective studies in this regard was carried out in 2011 by the GDV, the German Insurance Association, which concluded that systems that detect vehicles, as well as pedestrians, can reduce the number of collisions by 30.7%, and if they also detect cyclists, they could avoid up to 45.4% of accidents involving these users [1].
Deep Learning and Machine Learning are effective tools for the creation of autonomous driving systems, which employ Lidar sensors, infrared radar, and cameras to generate spatial awareness for correct decision-making. However, the inherent uncertainty of the sensors can lead to failures in taking data from the environment, thus reducing the safety and robustness of the system, which in the first instance was designed to avoid accidents. To counteract this phenomenon, sensor data fusion is employed, which achieves a reduction in the uncertainty in the data obtained from the environment by reducing the gap between measurements and actual data [2, 3]. Data fusion can occur in sensor arrays that use similar physical phenomena for measurement, such as sensor arrays that are heterogeneous to each other.
The EKF is one of the widely used methods for sensor data fusion [4], this chapter will show the design of Lidar and Radar sensor fusion starting from the CTRV model [4, 5] and how it can be taken to a three-dimensional model for a drone-type flying device. Performance comparison will also be made against the UKY model.
To extend the CTRV model to three dimensions, the following assumptions were taken into account:
Automobiles on highways do not present tangential movements between them, since the common traffic on highways maintains trajectories with a regular tendency.
The projection of the drone position will be examined as a function of the angular velocity of the drone and the angular velocity of the tracked object.
Figure 1 shows the dynamics between two cars on a highway, where ρ is the magnitude of the distance between the car with the sensor data fusion and the target, θ is the reference angle between the two, and ω is the angular velocity of the target.
Figure 1.
CTRV model for dynamics between two automobiles.
The CTRV model between the UAV system - moving target for the three-dimensional case, determines the projection of the position of the target xi + 1 on the axis starting from the values of the angular frequency w and the angle θ, [4, 5]. The commonly used sensors provide x and y positions concerning the measurement device in the case of Lidar and distance and angle formed with the measurement device in the case of Radar. Therefore, these variables are contemplated in the state variables x, y, and θ.
x¯=xyvθwwdE1
Therefore, the equations that model the dynamics in tracking the final position of the object, as a function of the angular velocities of the sensor drone and the velocity of the target have the following form:
x¯i+1=xi+vobject−vdrone⋅ΔTE2
y¯i+1=yi+vobject−vdrone⋅ΔTE3
The state variables are the frontal velocity, the theta angle, the target angular velocity, and the angular velocity of the UAV.
v=w⋅ΔTθ=0w=0wd=0E4
Because the data sensor fusion operation is bidimensional, the CTRV model does not include motion in the position about the z-axis in its state variables. To maintain a bi-dimensional analysis, the UAV velocity is projected as:
vx=VcosϕE5
vy=VsinϕE6
In this way ϕ represents the elevation of the UAV concerning the sensed target, this angle allows to projection of the velocities of the drone in the xz plane and determines the x + Δx or y + Δy, as shown in Figure 2, for the position prediction. The current technology provides IMU (inertial measurement units) and its evolution to AHRS (Attitude and Heading Reference Systems) shown in Figure 3, which internally incorporates a fusion of Gyroscope Accelerometer and magnetometer to achieve a georeferencing and is able to project the velocities of the drone to an XY plane to maintain the philosophy of the CTRV model.
Figure 2.
EKF performance for x and y position estimation.
Figure 3.
AHRS device.
To simplify the physical model for the EKF, we propose a data acquisition method in which the UAV only uses pitch (rotation on the lateral Y axis) and yaw (rotation on the vertical Z-axis) movements, and their projection in a three-dimensional coordinate system [6].
vd=VdxVdyVdzWdz=V0cosϕcosθV0cosϕsinθV0sinϕ0E7
The angular velocity of the target is possible to measure from the radar sensor, so the change of position of the target is also a function of the angular velocity as ΔT⋅w. The velocity equations are obtained from xi and yi, which corresponds to its first derivative, such that ẋi+1 and ẏi+1 are expressed as:
For the spatial projection of the data obtained from the fusion of Lidar and Radar sensors, a system with spherical coordinates is used.
The EKF allows us to reduce the uncertainty around the variables measured from the noisy sensor, by executing the following steps: (i) Projection of the system dynamics as a function of the state variables previously calculated, the error covariance matrix associated with the system, and the covariance matrix associated with the noise of the observations. (ii) The calculation of the Kalman gain allows to minimize the error of the current prediction with respect to it. (iii) Finally, the algorithm update of the measurement matrix and the error covariance matrix associated with the system. The representation from the selected state variables corresponds to the following equation:
x¯=fx+wE10
Where x¯ is the vector of states of the system and f(x) is a nonlinear function of those states. This model in state space is based on the dynamics of the system and allows to project of an estimation of the states and outputs a priori from the previous states. The reduction of the error between the values measured by the sensors and the values estimated by the filter is performed in an iterative way [7], mainly involving the projection of the state variables: The Kalman gain, the values measured by the sensors, the error covariance matrix associated to the system, and the covariance matrix associated to the noise of the observations.
Mk=ΦkPkΦkT+QkE11
The Kalman gain, the update of the measurements, and of the state variables, is defined according to the following equations:
Kk=MkHTHMkHT+Rk−1E12
Pk=I−KkHMkE13
z¯k=Hx¯+VkE14
x¯k=Φkx¯k−1+Kkzk−HΦkx¯k−1E15
The fundamental matrix for the EKF is defined as:
F=δfxδxx=x̂E16
The Jacobian corresponds to the first partial derivative of each state variable, it performs a linearization of the F function as can be seen next:
J=δx¯δxyvθwwdE17
Therefore, the discrete fundamental matrix corresponds to:
The matrix associated with the system noise was calculated from the discrete output matrix. For the proposed model the angular acceleration of the target has been taken into account; as well as the angular velocity and acceleration of the UAV μa,μw,μwd. The output matrix for the EKF is presented below.
Gkμ=∫0TsΦkτ⋅G⋅dτE21
Therefore, replacing the solution in matrix form is:
The noise matrix from the output matrix is calculated through the following expression:
Qk=Gk⋅Eμ⋅μT⋅GkTE23
With E being the expectation or mean value of the variance in the state variables magnitude, angular velocity of the target, and the angular velocity of the drone.
Eμ·μT=σa2000σw2000σwd2E24
Where σa2 is the standard deviation for the magnitude of the distance detected by the radar, σw2 is the standard deviation in the angular velocity extracted from the radar, σwd2 and is the angular velocity measured by the IMU inside the drone:
The covariance matrix associated with the noise of the observations Qk is represented by:
Regards the variables provided by the sensors, often in a sensor data fusion the data formats and protocols used by the manufacturers are different. In the LiDAR case, the distance estimation for autonomous driving applications is delivered in rectangular x and y coordinates, which for the purposes of this chapter are part of the state vector. In a fusion of LiDAR and Radar sensors alternated the measurements delivered by each of the sensors through the matrix H because there are six state variables to operate only the x and y variables maintaining the conformable product between x¯ and HL, we have that:
HL=100000010000E30
For the Radar, the measurement matrix changes to:
HR=100000010000001000000100000010E31
The measurement error covariance matrix of the LiDAR sensor, obtained from the statistical analysis of the data set obtained from this sensor is as follows:
Rk−L=0.0222000.0222E32
Rk−L is obtained from the variance in the LiDAR data set. Likewise, the measurement error covariance matrix of the radar sensor obtained is:
For this matrix, the covariance values are directly related to the resolution and variability around the measurements of the LiDAR and Radar sensors previously characterized for a generic situation. The purpose of this chapter is to investigate the response of the EKF and UKF filter in case of significant distortion increase of the x and y measurements for the LiDAR case and magnitude ρ, angle θ, and target speed in the Radar case.
About the implementation, the EKF includes the nonlinear functions sine and cosine, and the CORDIC (Coordinate Rotation Digital Computer) solves mathematical operations from three parameters, which allows to efficiently obtain calculations of sinusoidal functions, exponential, logarithms, roots, inverse trigonometric functions, and hyperbolic functions using additions, iterations and rotations of bits, this rotation process always converges in a fixed number of iterations [8].
2.1 Response of EKF
The performance of the EKF was examined by adding a contaminated signal and comparing the actual value with the filter response. For the CTRV model, the tracking of mobile objects by merging Lidar and Radar data achieves a good approach to the real measurement, counteracting the Gaussian noise associated with the uncertainty in the measurement of a sensor. The following Figure 2 shows the filter response.
To verify the filter’s ability to track targets, real measurements have been taken from lidar and radar sensors, for a predetermined trajectory shown by the blue line in Figure 2. The x and y positions at a height z are our variables of interest, the filter response represented by the red line, for the first 450 samples evidences the reduction in the scattering of the sensor data around the real trajectory.
To evaluate the robustness of the filter, a dataset has been built using the same scene by capturing cloud points with simultaneous Lidar and Radar data. For the Lidar signal, the data provides the x and y position in rectangular coordinates, and for the Radar case, the data has the magnitude and angle of the detected object and the magnitude of the detected angular velocity of the tracked object. Besides, this data set is degraded by adding white Gaussian noise (AWGN), and by considering that not all sensors provide good accuracy in their measurements, an evaluation of the response of the EKF when the data obtained from the sensors undergo progressive contamination is performed with results as shown Figure 4.
Figure 4.
EKF response when contaminating the dataset with AWGN (MATLAB) for a. −25 dB, b. −20 dB and c. −15 dB.
Graphically the real trajectory for Figure 4 is shown in green and the EKF estimates are in black. Figure 4. a shows the filter estimation for the measurements degraded by noise and with zero gain; for Figure 4. b a gain of 15 dB is included, and for Figure 4. c the gain increases up to 30 dB. The parameter to quantify the ability of the filter to discriminate the noise and approach the real values is the root mean square error (RMSE), the comparison of this parameter for the response of the EKF and the UKF will be examined later. A low capability of the EKF to reject high levels of noise associated with Lidar and Radar sensor measurements is evident.
The UKF filter uses the UT (Unscented transformation) to improve the estimates of the first moments of a first random variable [9, 10, 11] by propagating a second Gaussian random variable through a nonlinear transformation [12]. This allows the UKF not only to have a higher convergence speed of the filter but also to always guarantee this convergence. In order to take the CTRV model to three dimensions, the following assumptions were taken into account:
Having xk, yk state vectors, uk work variables, vk noise associated with the process, and nk noise associated with the measurements for an instant in time k [11, 13], the UKF filter starts from the following model:
xk=Fxk−1uk−1vk−1E34
For the proposed model using data sensor fusion, the drone-mobile object scenario and its dynamic model can be described as:
f=Px+Vx⋅ΔTE35
f=Py+Vy⋅ΔTE36
Where the fundamental matrix corresponds to:
F=10ΔT0010ΔT00100001E37
The vector of measurements in three dimensions can be expressed as [14]:
yk=HxknkE38
H=Px2+Py2+Pz2tan−1PyPxPx⋅Vx+Py⋅VyPx2+Py2+Pz2E39
Initialization: One of the characteristics of the UKF is the concatenation in the vector of states and the covariance matrix, which will be denominated as xa(k-1) and Pa(k-1), therefore they are initialized by fulfilling that:
x̂k−1a=xkvknkTE40
Pk−1a=Pk−1∣k−1000Q000RE41
With Q and Rr being the following matrix:
Q=ΔT240ΔT3200ΔT240ΔT32ΔT320ΔT200ΔT320ΔT2E42
Rr=0.090000.0050000.09E43
Sigma points are defined as:
Xk−1a=x̂ak−1x̂ak−1+L+λ⋅Pk−1ax̂ak−1−L+λ⋅Pk−1aE44
The update of the sigma points through the F function is given by:
xk∣k−1a=Fxk−1aukE45
Calculating x̂k-1 and Pk-1 is possible by means of the following expressions:
x̂k−=∑i=02LWimXi,k∣k−1E46
Pk−≈∑i=02LWicXi,k∣k−1−x̂k−Xi,k∣k−1−x̂k−TE47
In the same way, the vector of innovations of the process is also determined:
Ik∣k−1=Hxk∣k−1ukE48
ŷk−=∑i=02LWimIi,k∣k−1E49
Updating with measurements: the covariance matrix of the measurements is calculated as:
Pyk,yk≈∑i=02LWicIi,k∣k−1−ŷk−Ii,k∣k−1−ŷk−TE50
The cross-correlation between the estimated states and the sequence of measurements is:
Pxk,yk≈∑i=02LWicXi,k∣k−1−x̂k−Ii,k∣k−1−ŷk−TE51
Then, it is necessary to evaluate the gain of the Kalman filter and update the x̂k and Pk − 1
K=Pxk,ykPyk,yk−1E52
x̂k=x̂k+Kyk−ŷk−E53
Pk=Pk−+K⋅Pyk,yk⋅KTE54
3.1 Response of UKF
Similar to the way of evaluating the robustness of the EKF, the UKF its response has been subjected to a dataset also contaminated with AWGN in a stepwise manner, the response of the UKF is presented in the Figure 5.
Figure 5.
Example of the UT for mean and covariance propagation. Taken from [12].
Despite not having a modeling of UAV dynamics and mobile targets, the UKF achieves a very good rejection of noise associated with the data obtained from the Lidar and Radar sensors, managing to estimate to a large extent the real trajectory.
Figure 6 shows the strong ability of the UKF to reject high levels of noise associated with Lidar and Radar sensor measurements is evident. In real practice, the uncertainty associated with the measurements can be increased by different factors: sensor failures, very aggressive measurement environments, etc. For this reason, the UKF presents a more robust response to severe degradations in the data obtained from the sensors (Figure 7).
Figure 6.
EKF performance for x and y position estimation.
Figure 7.
UKF response when contaminating the dataset with AWGN (MATLAB) for a. −25 dB, b. −20 dB and c. −15 dB.
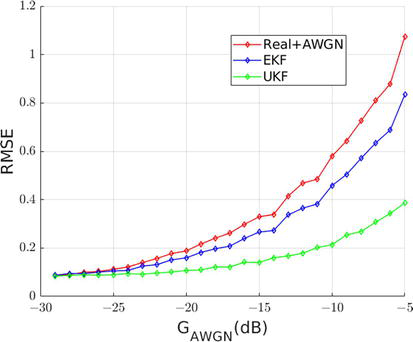
When performing a sweep in the gain of the noise added to the measurements of the Lidar and Radar sensors, and comparing the response of the EKF and UKF taking the RMSE as a reference parameter, the following response was observed.
Figure 8 shows a better capability of the UKF filter with respect to the EKF, for rejection of high noise levels in the sensor measurements, even when the noise level keeps increasing, the UKF response maintains low RMSE levels, i.e. it achieves a good estimation with respect to the real target position values. The following Table 1 shows the RMSE and MSE values for UKF and EKF with increasing AWGN. Note that the UKF response improves as the AWGN is increased.
Figure 8.
RMSE for EKF and UKF with increasing noise gain added to the dataset.
RMSE
G_AWGN
COORDINATE
EKF
UKF
−25dB
Px
0.1053
0.089
Py
0.125
0.1
−20dB
Px
0.159
0.1073
Py
0.1649
0.1166
−15dB
Px
0.266
0.14
Py
0.2582
0.147
MSE
G_AWGN
COORDINATE
EKF
UKF
−25dB
Px
0.011
0.008
Py
0.016
0.01
−20dB
Px
0.025
0.012
Py
0.027
0.014
−15dB
Px
0.071
0.02
Py
0.067
0.022
Table 1.
RMSE and MSE for X coordinate and Y coordinate.
Percentageally for −25 dB the UKF filter reduces noise by 14.8% more than the EKF filter, as the noise intensity is greater, this difference also increases with a value of 27.72% for −20 dB, and 38.23% at −15 dB.
For a correct filtering with EKF, good modeling of the system dynamics is required to achieve an accurate a priori prediction in the first stage of the filtering since the convergence of this filter by means of the Kalman gain is slower than the convergence of the UKF.
The UKF has a higher computational complexity compared to the EKF, when the CTRV model is combined with this last filter, a reduction of the computational complexity is obtained when it is implemented together with CORDIC.
When there is a fusion of Lidar and Radar sensor data in a drone with omnidirectional motion capability, the UKF filter has a better rejection of the noise associated with the measurements than the UKF filter.
Even with limited modeling of the system dynamics, the UKF manages to obtain an excellent response in the rejection of the noise associated with the fusion of the sensors.
By employing a progressive and constant increase of the distortion in the data obtained from the Lidar and Radar sensors, it was observed that the UKF has a more robust response to the increase of the uncertainty of the process to be filtered. For the actual implementation of a sensor data fusion system, this indicates a better adaptability of the UKF filter to different measurement scenarios as well as to differences in the quality of the sensors used.
The UPTC is part of the International Alliance with the Istituto di Tecnologie della Comunicazione dell’Informazione e della Percezione (TeCIP) from Italia and the Ljubljana University of Slovenia. We acknowledge NATO for the funds that make possible the research under grant G-5888 Science for Peace - Clarifier Research Project, and also, thanks to the UPTC for the administration of the funds under SGI-3139.
1.Cesviweb_user. Los sistemas ADAS sí reducen la accidentalidad [Internet]. 2017. Available from: https://www.cesvicolombia.com/los-sistemas-adas-si-reducen-la-accidentalidad/
2.Lee H, Chae H, Yi K. A geometric model based 2D LiDAR/radar sensor fusion for tracking surrounding vehicles. IFAC-PapersOnLine. 2019;52(8):277-282. DOI: 10.1016/j.ifacol.2019.08.060
3.Kim B, Yi K, Yoo HJ, Chong HJ, Ko B. An IMM/EKF approach for enhanced multitarget state estimation for application to integrated risk management system. IEEE Transactions on Vehicular Technology. 2015;64(3):876-889. DOI: 10.1109/TVT.2014.2329497
4.Farag W. Kalman-filter-based sensor fusion applied to road-objects detection and tracking for autonomous vehicles. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering. 2021;235(7):1125-1138. DOI: 10.1177/0959651820975523
5.Wang Y, Liu D, Matson E. Accurate Perception for Autonomous Driving: Application of Kalman Filter for Sensor Fusion. In: 2020 IEEE Sensors Applications Symposium (SAS); 09-11 March 2020; Kuala Lumpur. Malaysia: IEEE; 2020. p. 1-6, DOI: 10.1109/SAS48726.2020.9220083
6.Gandolfo DC, Salinas LR, Brandao A, Toibero JM. Stable path-following control for a quadrotor helicopter considering energy consumption. IEEE Transactions on Control Systems Technology. 2017;25(4):1423-1430. DOI: 10.1109/TCST.2016.2601288
7.Montañez OJ, Suarez MJ, Fernandez EA. Application of data sensor fusion using extended Kalman filter algorithm for identification and tracking of moving targets from LiDAR–radar data. Remote Sensing. 2023;15:3396. DOI: 10.3390/rs15133396
8.Volder JE. The CORDIC trigonometric computing technique. IRE Transactions on Electronic Computers. 1959;EC-8(3):330-334. DOI: 10.1109/TEC.1959.5222693
9.Tian K, Radovnikovich M, Cheok KC.Comparing EKF, UKF, and PF performance for autonomous vehicle multi-sensor fusion and tracking in highway scenario. In: IEEE SysCon 2022: The 16th Annual IEEE International Systems Conference Proceedings; 25-28 April 2022; Montreal. Canada: IEEE; 2022. p. 1-6. DOI: 10.1109/SysCon 53536.2022.9773872
10.Bucci A, Franchi M, Ridolfi A, Secciani N, Allotta B. Evaluation of UKF-based fusion strategies for autonomous underwater vehicles multisensor navigation. IEEE Journal of Oceanic Engineering. 2023;48(1):1-26. DOI: 10.1109/JOE.2022.3168934
11.Choi M, Seo M, Kim HS, Seo T. UKF-based sensor fusion method for position estimation of a 2-DOF rope driven robot. IEEE Access. 2021;9:12301-12308. DOI: 10.1109/ACCESS.2021.3051404
12.Eric W, der Merwe V. The unscented kalman filter. In: Simon H, editors. Kalman Filtering and Neural Networks. 1st ed. Chichester: Wiley; 2001. pp. 221-280. DOI: 10.1002/0471221546
13.Jeon D, Choi H, Kim J. UKF data fusion of odometry and magnetic sensor for a precise indoor localization system of an autonomous vehicle. In: 2016 13th International Conference on Ubiquitous Robots and Ambient Intelligence; 19-22 August 2016; Xi’an. China: IEEE; 2016. pp. 47-52. DOI: 10.1109/ URAI.2016.7734018
14.Yuan Z, Falin W, Yushuang L, Zhidong Z. IMM-UKF Based Airborne Radar and ESM Data Fusion for Target Tracking. In: 2019 14th IEEE International Conference on Electronic Measurement & Instruments (ICEMI); 01-03 November 2019; Changsha. China: IEEE; 2019. pp. 586-592. DOI: 10.1109/ICEMI46757.2019.9101826
Written By
Oscar M. Sogamoso, Eduardo A. Fernández and Marco J. Suarez
Submitted: 31 January 2024Reviewed: 09 February 2024Published: 03 May 2024